Vous aimerez peut-être aussi
- 05.1 - Cinématique Des Systèmes Matériels - TD1Document6 pages05.1 - Cinématique Des Systèmes Matériels - TD1AlaealeaPas encore d'évaluation
- Modélisation 3D de La Prothèse Totale de Hanche (PTH) Cas de Couple de Frottement (Alumine/Alumine)Document5 pagesModélisation 3D de La Prothèse Totale de Hanche (PTH) Cas de Couple de Frottement (Alumine/Alumine)Meddour BelkacemPas encore d'évaluation
- Modélisation Des AM - Robot 5 Axes (Correction)Document2 pagesModélisation Des AM - Robot 5 Axes (Correction)hufioPas encore d'évaluation
- 0 T T T T T T: Cours MécaniqueDocument11 pages0 T T T T T T: Cours MécaniqueBelheziel AekPas encore d'évaluation
- Corrige CC1 Calcul Des Structures 2017 2018Document6 pagesCorrige CC1 Calcul Des Structures 2017 2018Aya ChikerPas encore d'évaluation
- ENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020Document8 pagesENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020NANA EmmanuelPas encore d'évaluation
- Exam Soudage 2020Document2 pagesExam Soudage 2020Alae LaaraibiPas encore d'évaluation
- TD 02Document1 pageTD 02sarsauraPas encore d'évaluation
- TD N° 3: Assemblages Non DémontablesDocument2 pagesTD N° 3: Assemblages Non DémontablesKader HoumitaPas encore d'évaluation
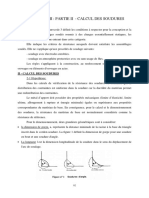
- Chapitre 8 Partie 2 - CALCUL DES SOUDURESDocument8 pagesChapitre 8 Partie 2 - CALCUL DES SOUDURESCara mellaPas encore d'évaluation
- Examen FF 2018 Corrigé V2Document6 pagesExamen FF 2018 Corrigé V2Anas BelladPas encore d'évaluation
- Seq 3Document6 pagesSeq 3Fatima LagnaouiPas encore d'évaluation
- ANNEXEDocument12 pagesANNEXENaoufel FaresPas encore d'évaluation
- Chapitre 4 EngrenagesDroitsDocument20 pagesChapitre 4 EngrenagesDroitsKaram QaoubPas encore d'évaluation
- Examen A05 SolutionDocument7 pagesExamen A05 SolutionAbdallah SbaghdiPas encore d'évaluation
- Transmission de Puissance Prof PDFDocument16 pagesTransmission de Puissance Prof PDFRuppy MIYOUNAPas encore d'évaluation
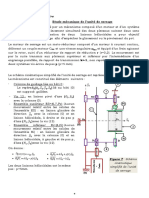
- Ecoulement Orifice FluideDocument24 pagesEcoulement Orifice FluideWael BadriPas encore d'évaluation
- Guide de Débutant en SolidworksDocument39 pagesGuide de Débutant en Solidworksomar cheikhrouhouPas encore d'évaluation
- TD 29 - Arc-BoutementDocument7 pagesTD 29 - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- Exo13 Corigé PDFDocument2 pagesExo13 Corigé PDFYoussef EL MliliPas encore d'évaluation
- 8516 E4 Bts Ip Europlastic 2014 SujetDocument32 pages8516 E4 Bts Ip Europlastic 2014 SujetAnonymous rvGgpvvqPas encore d'évaluation
- TP Flexion 2Document3 pagesTP Flexion 2Mrnadhir MecaniquePas encore d'évaluation
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- Comportement Mécanique Des matériaux-TDDocument6 pagesComportement Mécanique Des matériaux-TDNS ADPas encore d'évaluation
- PDF - Cours6Document23 pagesPDF - Cours6Simon Houde100% (1)
- Cours RDM Ens CachanDocument60 pagesCours RDM Ens Cachanlekouf4350% (4)
- Exo Corrigés MatériauDocument11 pagesExo Corrigés MatériauAristide DOSSOUPas encore d'évaluation
- Dossier CorrigeDocument7 pagesDossier CorrigeKamel TayahiPas encore d'évaluation
- Chapitre 6Document21 pagesChapitre 6HOUSSAME NAIMPas encore d'évaluation
- RDM Examen 02 CorrigéDocument9 pagesRDM Examen 02 CorrigéHassnae Aznag100% (1)
- Dynamique SiDocument10 pagesDynamique Siamo norPas encore d'évaluation
- Devoir de Synthèse N°1 - Physique التوتر الكهربائي - التكهرب - 9ème (2013-2014) Mr Hichem AmaraDocument3 pagesDevoir de Synthèse N°1 - Physique التوتر الكهربائي - التكهرب - 9ème (2013-2014) Mr Hichem Amarajifer100% (1)
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- DS1 - DMéc - Cellule Flexible D'usinageDocument3 pagesDS1 - DMéc - Cellule Flexible D'usinageElafif HamdiPas encore d'évaluation
- Exercice BE2 Ensam MeknesDocument8 pagesExercice BE2 Ensam MeknesThe ShadowPas encore d'évaluation
- MDS - Partie 3 - Chap 15 À 18 - Dimensionnement Des Structures Soumises À Effort NormalDocument67 pagesMDS - Partie 3 - Chap 15 À 18 - Dimensionnement Des Structures Soumises À Effort NormalSamagassi SouleymanePas encore d'évaluation
- 8farb-Poste Automatique de Peinture de Paraboles Serie 1 Avec CorrectionDocument5 pages8farb-Poste Automatique de Peinture de Paraboles Serie 1 Avec CorrectionOm youssefPas encore d'évaluation
- TN06 PDFDocument34 pagesTN06 PDFMa HdiPas encore d'évaluation
- Usinage ChimiqueDocument29 pagesUsinage Chimiquetes7wx4yq889w2r67v4Pas encore d'évaluation
- Exercices 3 Et 4 - Emmanchement - Forcé - Sur MicroDocument6 pagesExercices 3 Et 4 - Emmanchement - Forcé - Sur MicroNassima ŠïmøPas encore d'évaluation
- TP 11Document14 pagesTP 11elfahime ELFAHIMEPas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Les Liaisons Completes Etude Des LiaisonDocument9 pagesLes Liaisons Completes Etude Des Liaisonموسى زاويPas encore d'évaluation
- PDF - Cours7Document17 pagesPDF - Cours7Simon HoudePas encore d'évaluation
- Chapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxDocument5 pagesChapitre 2 Essais D'endurance: Cours de Fatigue Des MatériauxFrancis SonkengPas encore d'évaluation
- Mecanique de La RuptureDocument31 pagesMecanique de La Ruptureموسى زاوي100% (1)
- Le PliageDocument20 pagesLe PliageMarwanePas encore d'évaluation
- Support CM1 - EnspdDocument83 pagesSupport CM1 - Enspdappoloniustonye145Pas encore d'évaluation
- Calcul DommageDocument10 pagesCalcul DommageValérie ParedesPas encore d'évaluation
- Chapitre 2 PliageDocument12 pagesChapitre 2 PliageWael Maatoug100% (1)
- Cours Sciences Des Matériaux 2Document40 pagesCours Sciences Des Matériaux 2Laila AzzouziPas encore d'évaluation
- CNC MpsiDocument2 pagesCNC MpsiAbdelali YacoubiPas encore d'évaluation
- Choix D'un Vérin PDFDocument2 pagesChoix D'un Vérin PDFKarem JebrilPas encore d'évaluation
- m09 Conception Et Dessin Doutillages de Production Version 3-Fm-tsmfmDocument60 pagesm09 Conception Et Dessin Doutillages de Production Version 3-Fm-tsmfmKouchad FouadPas encore d'évaluation
- Soudix AideDocument17 pagesSoudix Aidepalary18Pas encore d'évaluation
- Statique GraphiqueDocument3 pagesStatique Graphiquesallsmart100% (1)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Exo MCD To MR CoursiiiDocument2 pagesExo MCD To MR Coursiiiأنور قيدومPas encore d'évaluation
- Oued Selouane - Discussion (Pont Vs Dalot)Document8 pagesOued Selouane - Discussion (Pont Vs Dalot)Toby KuntaPas encore d'évaluation
- 4 Pages ModuloDocument4 pages4 Pages ModuloAnthony PouillouxPas encore d'évaluation
- TBT - 017 - Équipement D'accès Suspendu - EmbranchementDocument1 pageTBT - 017 - Équipement D'accès Suspendu - EmbranchementhossamPas encore d'évaluation
- Rapport de Stage SAMIR FinalDocument38 pagesRapport de Stage SAMIR FinalYassine Xabi Alonso100% (1)
- Exercice-4 3 2Document6 pagesExercice-4 3 2SEDIMPas encore d'évaluation
- CFAO Code GDocument85 pagesCFAO Code GjoePas encore d'évaluation
- 86 FT Epoxyguard Im 409 Rev 07 2015 FRDocument2 pages86 FT Epoxyguard Im 409 Rev 07 2015 FRMac MacPas encore d'évaluation
- Res Fixes RTCDocument147 pagesRes Fixes RTCFathi SmaouiPas encore d'évaluation
- Schéma D'implantation Lave-Linge Professionnels PW 413 PW 418Document36 pagesSchéma D'implantation Lave-Linge Professionnels PW 413 PW 418Driss KhayiPas encore d'évaluation
- SYST d'EXTINCTION REV CDocument19 pagesSYST d'EXTINCTION REV CMediterranei ExypniPas encore d'évaluation
- Arval - Couverture Seche Novembre 2008Document68 pagesArval - Couverture Seche Novembre 2008Youssef TakatePas encore d'évaluation
- Fin de Formation - Synthése ESA 2022 (TEST2)Document10 pagesFin de Formation - Synthése ESA 2022 (TEST2)otmane touilPas encore d'évaluation
- Métré PontDocument48 pagesMétré PontBoniface Rasolonjaka100% (1)
- td4 5Document7 pagestd4 5Nabil BikriPas encore d'évaluation
- Créer Une Image InitialeDocument19 pagesCréer Une Image InitialetazoubPas encore d'évaluation
- DB8051Document42 pagesDB8051awemetalPas encore d'évaluation
- Etude Des Caractéristiques Microstructurales Et Électriques de La Solution SolideDocument164 pagesEtude Des Caractéristiques Microstructurales Et Électriques de La Solution SolideIloDzairPas encore d'évaluation
- coursNodeJs PDFDocument66 pagescoursNodeJs PDFrodrigue ntchounkeuPas encore d'évaluation
- 70611506524971wmsh FR Lowres PDFDocument136 pages70611506524971wmsh FR Lowres PDFbenyahiakawtar12Pas encore d'évaluation
- Masterlink ProgrammationDocument3 pagesMasterlink Programmationredo80Pas encore d'évaluation
- Ouvrages de Soutènement Cours-CompresséDocument9 pagesOuvrages de Soutènement Cours-CompresséThinhinaneGuedriPas encore d'évaluation
- Notice DS4Document396 pagesNotice DS4Anonymous 2GEYn1Pas encore d'évaluation
- Sika Anchorfix 3 PlusDocument4 pagesSika Anchorfix 3 PlusBelgacem AlouiPas encore d'évaluation
- Moment D'inertie de FlexionDocument4 pagesMoment D'inertie de FlexionMEJRI AbirPas encore d'évaluation
- Sony HVR-Z1 (FR) PDFDocument148 pagesSony HVR-Z1 (FR) PDFbogdan.neagota54230% (1)
- Bericht PV WP - FRLDocument24 pagesBericht PV WP - FRLJassem ArbiPas encore d'évaluation
- Codes D ErreurDocument10 pagesCodes D ErreurTsiba chiracPas encore d'évaluation
- BEP ELEEC Annexe I Et II VFDocument45 pagesBEP ELEEC Annexe I Et II VFfarid said errahmaniPas encore d'évaluation
- Rapport Pfe Fatima Ezzaoui Et Rokia RafiDocument57 pagesRapport Pfe Fatima Ezzaoui Et Rokia RafiAdil EttalhaouiPas encore d'évaluation