Vous aimerez peut-être aussi
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Electronique Et Loisirs - Cours Microcontroleur PicDocument81 pagesElectronique Et Loisirs - Cours Microcontroleur PicDON AYUPOPas encore d'évaluation
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- 01 - Structure Des Systèmes MicroprogrammésDocument40 pages01 - Structure Des Systèmes Microprogrammésrachid BASSELAMPas encore d'évaluation
- Apprendre et enseigner sur le Web: quelle ingénierie pédagogique?D'EverandApprendre et enseigner sur le Web: quelle ingénierie pédagogique?Pas encore d'évaluation
- DéfinitionDocument5 pagesDéfinitionAicha B'mh100% (1)
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- TP 3 RNDocument2 pagesTP 3 RNIlyes KhelifiPas encore d'évaluation
- Chapitre 4 Alimentation - Moteur - Pas - À - PasDocument37 pagesChapitre 4 Alimentation - Moteur - Pas - À - Paskhaled100% (1)
- 5eme - S4 - 2 - ActivitéDocument2 pages5eme - S4 - 2 - ActivitéLaraPas encore d'évaluation
- Travaux Pratiques Electronique NumériqueDocument10 pagesTravaux Pratiques Electronique NumériqueOumaima RhayaPas encore d'évaluation
- 2cellules MOSDocument31 pages2cellules MOSaammiinneePas encore d'évaluation
- 3 Cours Microprocesseur 16 BitsDocument15 pages3 Cours Microprocesseur 16 BitsSeghiour AbdellatifPas encore d'évaluation
- helabenghorbelL2SEM OdtDocument17 pageshelabenghorbelL2SEM OdtHela Ben GhorbelPas encore d'évaluation
- Modbus 2019Document45 pagesModbus 2019AZwaPas encore d'évaluation
- Préparation Du TP 4Document4 pagesPréparation Du TP 4BENYOUSSEF ANISPas encore d'évaluation
- TD1 Gi1Document2 pagesTD1 Gi1Hamza Mhal100% (1)
- Ccma PDFDocument110 pagesCcma PDFJaouad AssagPas encore d'évaluation
- CHAP1Document6 pagesCHAP1riadh hassnaouiPas encore d'évaluation
- Rappelle ArduinoDocument42 pagesRappelle ArduinosanadPas encore d'évaluation
- TD N - 1architecture PDFDocument2 pagesTD N - 1architecture PDFABDELKARIM AINPas encore d'évaluation
- Cours 1 CmosDocument38 pagesCours 1 CmosMed LabbiPas encore d'évaluation
- MiniprojetDocument6 pagesMiniprojetaya abdallahPas encore d'évaluation
- 6809 OfpptDocument27 pages6809 OfpptLAHOUSSINE ELMAHNIPas encore d'évaluation
- MMO Corrigé Sujet 1synthèse M21Document3 pagesMMO Corrigé Sujet 1synthèse M21Abdou KarimPas encore d'évaluation
- Ex 1 TP 3 DSPDocument4 pagesEx 1 TP 3 DSPAmineSlamaPas encore d'évaluation
- Cours SM en Ligne-ConvertiDocument72 pagesCours SM en Ligne-ConvertiAnfel CPas encore d'évaluation
- TP TD N2 Microntroleur AssembleurDocument4 pagesTP TD N2 Microntroleur AssembleurKhaoula EddouibPas encore d'évaluation
- Pic 16F84 Fichier3Document92 pagesPic 16F84 Fichier3Bentchikou MohPas encore d'évaluation
- Jeu D - Instructions Du PIC16F84ADocument9 pagesJeu D - Instructions Du PIC16F84AOMAR ENNAJIPas encore d'évaluation
- Chapitre1 Evolution Des OrdinateursDocument45 pagesChapitre1 Evolution Des OrdinateursidemPas encore d'évaluation
- Mini ProjetDocument18 pagesMini ProjetAli AourdouPas encore d'évaluation
- Electromagn Eleve 20-06Document153 pagesElectromagn Eleve 20-06Lucas huzvdcbPas encore d'évaluation
- Travaux Dirigés Architecture Des Ordinateurs Smi4 2019/2020Document2 pagesTravaux Dirigés Architecture Des Ordinateurs Smi4 2019/2020kpossou hermannPas encore d'évaluation
- 9 - ELE140-Conception Des Systèmes NumériquesDocument5 pages9 - ELE140-Conception Des Systèmes NumériquesAbdelwahed El Alami100% (1)
- LST - GEGM - S4 - Module - Informatique 3 - Réseaux InformatiqueDocument107 pagesLST - GEGM - S4 - Module - Informatique 3 - Réseaux Informatiqueʚlɞ Jay ʚlɞPas encore d'évaluation
- Installation Quartus 9.1 Sur PCDocument20 pagesInstallation Quartus 9.1 Sur PCZanarkand TidusPas encore d'évaluation
- Command LineDocument199 pagesCommand LineDIMI EKONGA NZELLYPas encore d'évaluation
- Cours C Pour EmbarqueDocument119 pagesCours C Pour EmbarqueMOMO WADIATOULAYEPas encore d'évaluation
- Partie-2-Microprocesseur + MemoireDocument14 pagesPartie-2-Microprocesseur + MemoireyaoPas encore d'évaluation
- TP ArduinoDocument9 pagesTP Arduinooriginyoucef17Pas encore d'évaluation
- Systeme MicroDocument25 pagesSysteme MicroHafsa NouichPas encore d'évaluation
- Cours CIs - 2012Document174 pagesCours CIs - 2012Ayman OubghachiPas encore d'évaluation
- TP SignalDocument13 pagesTP SignalRabah HadjarPas encore d'évaluation
- Ado 1ap 21-22 TD4Document2 pagesAdo 1ap 21-22 TD4Hamza BoutlihPas encore d'évaluation
- Chapitre 8 Convertisseur Adc DacDocument9 pagesChapitre 8 Convertisseur Adc DacMedPas encore d'évaluation
- TP1Document5 pagesTP1Oumayma AmiriPas encore d'évaluation
- Cours MicrocontrrolleurDocument65 pagesCours MicrocontrrolleurCrypto Sylvain100% (1)
- Cahier Des Charges Projet BAC 2023-2Document10 pagesCahier Des Charges Projet BAC 2023-2mlcPas encore d'évaluation
- Chapitre IIIDocument34 pagesChapitre IIIIbrahimFaroukSolarPas encore d'évaluation
- Chap II FIltres MicoondesDocument23 pagesChap II FIltres MicoondesMhamed BouhaikPas encore d'évaluation
- Support de Cour PIC16F877A Partie 3Document21 pagesSupport de Cour PIC16F877A Partie 3Zakaria hanai100% (1)
- TD 1Document2 pagesTD 1Hary YoskovichPas encore d'évaluation
- TP Réseaux Locaux Indust TP1Document15 pagesTP Réseaux Locaux Indust TP1mabrouka gmidenPas encore d'évaluation
- Chapitre 4 - 2008 1 PDFDocument38 pagesChapitre 4 - 2008 1 PDFoussema zmerliPas encore d'évaluation
- TP Microprocesseur ControleurDocument32 pagesTP Microprocesseur ControleurSalma NsalmaPas encore d'évaluation
- TP Initiation Langage C Avec Un Microcontrôleur PICDocument11 pagesTP Initiation Langage C Avec Un Microcontrôleur PICAbdoulrazakPas encore d'évaluation
- TP 4Document12 pagesTP 4boufakri abdelmounaimPas encore d'évaluation
- Formation MP Pro Pic 2015Document35 pagesFormation MP Pro Pic 2015شكري خلفليPas encore d'évaluation
- Atelier Réseaux LocauxDocument23 pagesAtelier Réseaux LocauxMohamed Hedi GmidenPas encore d'évaluation
- Cours Electronique de Puissance EPDocument49 pagesCours Electronique de Puissance EPfarid saadPas encore d'évaluation
- Cahier Des Charges GED DematerialisationDocument60 pagesCahier Des Charges GED DematerialisationMan EllePas encore d'évaluation
- TP MicrocontroleurDocument26 pagesTP MicrocontroleurRonel valere FeussiPas encore d'évaluation
- EDP Ch03 Redresseur Commande V2Document15 pagesEDP Ch03 Redresseur Commande V2الخوداري نهالPas encore d'évaluation
- Fiche D'inventaire Des Matériels Et MobiliersDocument3 pagesFiche D'inventaire Des Matériels Et Mobiliersべなぼう もうたりPas encore d'évaluation
- Langage Assembleur (SIBABI) Cours en Ligne PDFDocument177 pagesLangage Assembleur (SIBABI) Cours en Ligne PDFperpetuePas encore d'évaluation
- Électronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesDocument5 pagesÉlectronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesFake ShtemaruPas encore d'évaluation
- Compte Rendu D'informatique IndustrielleDocument7 pagesCompte Rendu D'informatique IndustrielleAmmar BahijPas encore d'évaluation
- Disque, Base de Données, SSL, Bande Passante Illimitée, Baie de Stockage SSDDocument47 pagesDisque, Base de Données, SSL, Bande Passante Illimitée, Baie de Stockage SSDShayna MagdaoPas encore d'évaluation
- Electronique1 EIDD Cours3Document41 pagesElectronique1 EIDD Cours3Bernadel KendyPas encore d'évaluation
- Relais D'interface Et Optocoupleurs Débrochables 2/72Document34 pagesRelais D'interface Et Optocoupleurs Débrochables 2/72Philbertyuit PhPas encore d'évaluation
- Chap2 Transistor BipolaireDocument18 pagesChap2 Transistor BipolaireBassmala BaraaPas encore d'évaluation
- Nouveau Microsoft Word DocumentDocument9 pagesNouveau Microsoft Word DocumentNawres MsakniPas encore d'évaluation
- Liste Des AppareilsDocument2 pagesListe Des AppareilsGermany de la CemacPas encore d'évaluation
- BADRA Omar PDFDocument1 pageBADRA Omar PDFediiexXxPas encore d'évaluation
- Activité1 c3.1 EnonceDocument5 pagesActivité1 c3.1 EnonceSOUHA CHAARPas encore d'évaluation
- Support de Cours N 5 - Gestion Des GPIOsDocument6 pagesSupport de Cours N 5 - Gestion Des GPIOsmanarPas encore d'évaluation
- Cours Faiseaux HertzienDocument15 pagesCours Faiseaux Hertzienben mohamed dossoPas encore d'évaluation
- TPN1: Redressement Monophasé À Diode Un Redresseur Double Alternance Monophasée: Est UnDocument13 pagesTPN1: Redressement Monophasé À Diode Un Redresseur Double Alternance Monophasée: Est UnBilal CrosPas encore d'évaluation
- Eln Tp1 Boulanouar SarraDocument12 pagesEln Tp1 Boulanouar SarraPoupée De SoiePas encore d'évaluation
- Initiation Info - 2022 2023 BGMDocument41 pagesInitiation Info - 2022 2023 BGMguytanoh690Pas encore d'évaluation
- Cours Microprocess EurDocument35 pagesCours Microprocess EurAyoub hohiPas encore d'évaluation
- Upson 1000 3000va RT Ups TechnologyDocument2 pagesUpson 1000 3000va RT Ups TechnologyFranck Yvan Lantohery RaveloarisonPas encore d'évaluation
- TP02Document11 pagesTP02DixPas encore d'évaluation
- 30 Sur PC Portable Gaming HP Victus 15-Fb0160nf 15,6 AMD Ryzen 5 16 Go RAM 512 Go SSD Argent Mica - PC Portable - Achat & PriDocument1 page30 Sur PC Portable Gaming HP Victus 15-Fb0160nf 15,6 AMD Ryzen 5 16 Go RAM 512 Go SSD Argent Mica - PC Portable - Achat & PriWillingGhost 8Pas encore d'évaluation
- Phonak CompilotDocument72 pagesPhonak CompilotGiannco De GraciaPas encore d'évaluation
- TD de MicroP Et MicroC - Master IEADocument2 pagesTD de MicroP Et MicroC - Master IEAAymard MougouPas encore d'évaluation
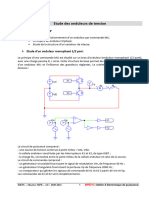
- Etude Des Onduleurs de TensionDocument5 pagesEtude Des Onduleurs de TensionNaima mecherguiPas encore d'évaluation
- M Ele - Sy.em 2021 07Document101 pagesM Ele - Sy.em 2021 07Egide Ilunga MpianaPas encore d'évaluation
- M2N-Vm Dvi: Quick Start GuideDocument38 pagesM2N-Vm Dvi: Quick Start Guideiohuik cdcdsPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Gestion de projet : outils pour la vie quotidienneD'EverandGestion de projet : outils pour la vie quotidienneÉvaluation : 5 sur 5 étoiles5/5 (2)
- La communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseD'EverandLa communication professionnelle facile à apprendre: Le guide pratique de la communication professionnelle et des meilleures stratégies de communication d'entrepriseÉvaluation : 5 sur 5 étoiles5/5 (1)
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Piraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéD'EverandPiraté: Guide Ultime De Kali Linux Et De Piratage Sans Fil Avec Des Outils De Test De SécuritéPas encore d'évaluation
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- Création d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileD'EverandCréation d'une start-up à succès de A à Z: Réussir votre Start-up 2.0 Web et MobileÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Créer Son Propre Site Internet Et Son Blog GratuitementD'EverandCréer Son Propre Site Internet Et Son Blog GratuitementÉvaluation : 5 sur 5 étoiles5/5 (1)
- Kali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.D'EverandKali Linux pour débutant : Le guide ultime du débutant pour apprendre les bases de Kali Linux.Évaluation : 5 sur 5 étoiles5/5 (1)
- Explication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumD'EverandExplication De La Technologie Blockchain: Guide Ultime Du Débutant Au Sujet Du Portefeuille Blockchain, Mines, Bitcoin, Ripple, EthereumPas encore d'évaluation
- Marketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxD'EverandMarketing: Guide Pour Gagner De L'argent En Ligne Avec Les Réseaux SociauxPas encore d'évaluation
- 101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerD'Everand101 idées pour travailler à domicile: Plus tous les conseils pour bien démarrerÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- La psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsD'EverandLa psychologie du travail facile à apprendre: Le guide d'introduction à l'utilisation des connaissances psychologiques dans le domaine du travail et des organisationsPas encore d'évaluation
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Forex Trading facile à apprendre: Le guide d'introduction au marché des changes et aux stratégies de négociation les plus efficaces dans l'industrie des devises.D'EverandForex Trading facile à apprendre: Le guide d'introduction au marché des changes et aux stratégies de négociation les plus efficaces dans l'industrie des devises.Évaluation : 4 sur 5 étoiles4/5 (1)