Vous aimerez peut-être aussi
- I-Evaluation Des Ressources. / 24PtsDocument3 pagesI-Evaluation Des Ressources. / 24PtshamidaPas encore d'évaluation
- No4 18 Fev 2022 Sujetexa - ComDocument3 pagesNo4 18 Fev 2022 Sujetexa - ComJV DDPas encore d'évaluation
- Série N°3 de Physique II SVII 2017 2018 FacultatifDocument8 pagesSérie N°3 de Physique II SVII 2017 2018 Facultatifbenkhaleqmaroua1Pas encore d'évaluation
- ÉlectromagnétismeDocument11 pagesÉlectromagnétismeayoub elPas encore d'évaluation
- Physique - Collège Vogt - Mini Session - Terminale D Ti - Novembre 2021 - Année Scolaire 2021 - 2022Document2 pagesPhysique - Collège Vogt - Mini Session - Terminale D Ti - Novembre 2021 - Année Scolaire 2021 - 2022Johan MarcPas encore d'évaluation
- Physique-Chapitre6-travail Et EnergiesDocument3 pagesPhysique-Chapitre6-travail Et Energiesstefan0% (1)
- Exercices Oraux CCP Physique MPDocument13 pagesExercices Oraux CCP Physique MPayoub elPas encore d'évaluation
- TD MaxwellDocument3 pagesTD MaxwellHoussam BenkerroumPas encore d'évaluation
- EM3 Electrostatique 1 1516Document40 pagesEM3 Electrostatique 1 1516lilia Bennaceur FarahPas encore d'évaluation
- Correction de La Série N°3 de MPM - 2020-2021Document9 pagesCorrection de La Série N°3 de MPM - 2020-2021MounirPas encore d'évaluation
- EVALUATION N°4 DE Physique Tle CDocument4 pagesEVALUATION N°4 DE Physique Tle CArmelPas encore d'évaluation
- td5 OscillateursDocument2 pagestd5 OscillateursAdri LebPas encore d'évaluation
- Physique 1: 4 Heures Calculatrice AutoriséeDocument8 pagesPhysique 1: 4 Heures Calculatrice AutoriséeYoussef AadelPas encore d'évaluation
- TD07 RSF 2023Document7 pagesTD07 RSF 2023dawoud.kenzariPas encore d'évaluation
- Td-2013-Physique-Chimie-Au-Lycee-Par-Wahab-Diop-Lsll - Compress 2Document2 pagesTd-2013-Physique-Chimie-Au-Lycee-Par-Wahab-Diop-Lsll - Compress 2Momme Ould Deyahi AchrifPas encore d'évaluation
- Eva 2 Tle C BOBONGODocument3 pagesEva 2 Tle C BOBONGOtagne100% (1)
- Epreuves Ems 4Document4 pagesEpreuves Ems 4ndiayePas encore d'évaluation
- TD6 - Forces CentralesDocument4 pagesTD6 - Forces Centraleschedibensalem02Pas encore d'évaluation
- ENS MécaDocument4 pagesENS MécaFred AlexPas encore d'évaluation
- Forces Et ChampsDocument4 pagesForces Et ChampsNdema Abdou Stéphane100% (1)
- Capteur EX Avec CorigerDocument65 pagesCapteur EX Avec Corigermohamed rissaniPas encore d'évaluation
- Série 04 - Energie Et Travail 2020-2021 V01Document4 pagesSérie 04 - Energie Et Travail 2020-2021 V01Farid BelalPas encore d'évaluation
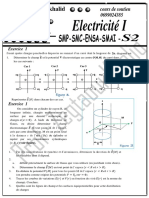
- TD N1 Electricite 1Document7 pagesTD N1 Electricite 1Khalid Zeg100% (1)
- TD Physique Termrnale C Et D Octobre N°3Document2 pagesTD Physique Termrnale C Et D Octobre N°3Aubin TcheunouPas encore d'évaluation
- AP Seance 16 Mouvement Champ CorrectionDocument2 pagesAP Seance 16 Mouvement Champ CorrectionSoufiane Adiane0% (1)
- ' ' Premier Exercice (7 Points) Pendule Élastique HorizontalDocument6 pages' ' Premier Exercice (7 Points) Pendule Élastique HorizontalAli Rammal50% (2)
- 22564329Document2 pages22564329Mahfoud ZakiPas encore d'évaluation
- EM06 ExercicesDocument5 pagesEM06 ExercicesVictor B.Pas encore d'évaluation
- TD2 DUT1 - MécaDocument3 pagesTD2 DUT1 - Mécasambatall85Pas encore d'évaluation
- TD Champ Electrique 2019 LSLL WahabdiopDocument2 pagesTD Champ Electrique 2019 LSLL WahabdiopAssanePas encore d'évaluation
- TD Mec 5 OscillateurDocument5 pagesTD Mec 5 OscillateurChafi DrissPas encore d'évaluation
- EM4 TD Dipôle ElectrostatiqueDocument2 pagesEM4 TD Dipôle ElectrostatiqueTahar Kateb100% (1)
- SerieEnergie PDFDocument11 pagesSerieEnergie PDFlolobsPas encore d'évaluation
- 17-Oscillateur+charge Et Decharg+ Courant Sinus+ Pendule PesantDocument5 pages17-Oscillateur+charge Et Decharg+ Courant Sinus+ Pendule PesantAnonymous hbpCoy40% (1)
- PDF Annales Examens Corrig S de M Canique Du Point SMPC Smia - CompressDocument63 pagesPDF Annales Examens Corrig S de M Canique Du Point SMPC Smia - Compressbihi.102.haytamPas encore d'évaluation
- TD2 Dynamique Du PointDocument2 pagesTD2 Dynamique Du Pointsambe.elPas encore d'évaluation
- Chapitre 3Document3 pagesChapitre 3beloufaPas encore d'évaluation
- ExercicesRésolus InstrumentationDocument83 pagesExercicesRésolus Instrumentationmalika elorfPas encore d'évaluation
- 1cqoatv1j 636301Document2 pages1cqoatv1j 636301ibrahima ndiayePas encore d'évaluation
- Partie A: Evaluation Des Ressources /24pointsDocument3 pagesPartie A: Evaluation Des Ressources /24pointsA NCPas encore d'évaluation
- TP Mecanique Sur Coussin DairDocument2 pagesTP Mecanique Sur Coussin DairCheujeu chaldouPas encore d'évaluation
- TP PhysiqueV Electrostatique Magnetostatique Induction2122Document16 pagesTP PhysiqueV Electrostatique Magnetostatique Induction2122Qitai WEIPas encore d'évaluation
- No12 24 Mars 2022 Sujetexa - ComDocument2 pagesNo12 24 Mars 2022 Sujetexa - ComSonia Dimo100% (1)
- DS 01Document6 pagesDS 01françois dupontPas encore d'évaluation
- Concours Ensa 2013 Physique Chimie EpreuveDocument4 pagesConcours Ensa 2013 Physique Chimie EpreuveAdil NomadPas encore d'évaluation
- Exercices Instrumentation GEI 2Document7 pagesExercices Instrumentation GEI 2yannickbossaPas encore d'évaluation
- Examen Phy 1 Des Années PrécédentesDocument42 pagesExamen Phy 1 Des Années PrécédentesteymaahmdPas encore d'évaluation
- Électromagnétisme: Devoir Maison N 2 - LP 205 - : L'atome de ThomsonDocument3 pagesÉlectromagnétisme: Devoir Maison N 2 - LP 205 - : L'atome de ThomsonAz-eddine KaibaPas encore d'évaluation
- Mécanique - Physique L1Document21 pagesMécanique - Physique L1Yohann CaillardPas encore d'évaluation
- TD4 Physique Terminal DDocument9 pagesTD4 Physique Terminal Dvianney fotsoPas encore d'évaluation
- Fiches Syntheses 2Document4 pagesFiches Syntheses 2AyoubPas encore d'évaluation
- Ds Cinématique-Dynamique - Changement de Ref Mpsi3dyudjtjkxhhjdDocument2 pagesDs Cinématique-Dynamique - Changement de Ref Mpsi3dyudjtjkxhhjdSimo DlimiPas encore d'évaluation
- Fiches TD Phys. IIDocument51 pagesFiches TD Phys. IIbendrissaya349Pas encore d'évaluation
- CoursPHY110 2Document7 pagesCoursPHY110 2Gayo EntrepreneurPas encore d'évaluation
- Ds 6Document4 pagesDs 6Subhane JohnPas encore d'évaluation
- TD18 - Em1Document7 pagesTD18 - Em1kurts010Pas encore d'évaluation
- 05 EprDocument7 pages05 EprhakkayPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Db27Kse: Groupe ElectrogeneDocument4 pagesDb27Kse: Groupe ElectrogeneDa silva Antonio DanyPas encore d'évaluation
- CalorimetrieDocument2 pagesCalorimetrieToki Mimi100% (1)
- M. Sow MPC Année Scolaire: 2020-2021 Durée: 2h00min ClasseDocument1 pageM. Sow MPC Année Scolaire: 2020-2021 Durée: 2h00min ClasseNdeye diama Diop100% (1)
- td1 RoDocument2 pagestd1 RoAnas BouchikhiPas encore d'évaluation
- Astuce UtileDocument6 pagesAstuce Utilejubatus82Pas encore d'évaluation
- EXTJRDocument2 pagesEXTJRRAIDEN YTPas encore d'évaluation
- Relation D'équivalence, Relation D'ordreDocument3 pagesRelation D'équivalence, Relation D'ordreOmar AmrouchePas encore d'évaluation
- BD PDFDocument13 pagesBD PDFPFEPas encore d'évaluation
- BN-30x20ht NoteDocument4 pagesBN-30x20ht NotemaiducthoPas encore d'évaluation
- Impo Dimensionnement Installation Electrique 2Document80 pagesImpo Dimensionnement Installation Electrique 2Rabia Manar100% (4)
- TP1 JavaDocument2 pagesTP1 JavaMohamedReda SaidiPas encore d'évaluation
- Epreuves Ecrit Concours P40Document4 pagesEpreuves Ecrit Concours P40محند ايت يحياتنPas encore d'évaluation
- Maillage 4Document1 pageMaillage 4Reda BengrabPas encore d'évaluation
- M202-Administrer Un Environnement WindowsDocument216 pagesM202-Administrer Un Environnement WindowsotmanwbouwPas encore d'évaluation
- TP Final 1Document8 pagesTP Final 1linaPas encore d'évaluation
- Série de Révision2 (DR) (Corrigé)Document6 pagesSérie de Révision2 (DR) (Corrigé)Wagih MrassiPas encore d'évaluation
- Intégration D'une Pompe À Chaleur Dans Un Procédé Agroalimentaire - Simulation, Expérimentation Et IntégrationDocument137 pagesIntégration D'une Pompe À Chaleur Dans Un Procédé Agroalimentaire - Simulation, Expérimentation Et Intégrationmonsterh5100% (1)
- Exercices - Asservissement A ChercherDocument13 pagesExercices - Asservissement A ChercherLaurenne YaoPas encore d'évaluation
- SLC500 User ManuelDocument712 pagesSLC500 User ManuelFitas Mounir100% (2)
- GödelDocument8 pagesGödelMarco BalzariniPas encore d'évaluation
- Eval 1 - 3e - BaremeDocument4 pagesEval 1 - 3e - BaremeemmanuelcreantorPas encore d'évaluation
- Les Méthodes de MaintenanceDocument3 pagesLes Méthodes de MaintenanceSàmi BmPas encore d'évaluation
- 2-Étude Et Tracé D'une Fonction - Exercices - Fonctions Rationnelles (1) - WikiversitéDocument14 pages2-Étude Et Tracé D'une Fonction - Exercices - Fonctions Rationnelles (1) - WikiversitéBoris AHADOPas encore d'évaluation
- 15 Classeur Zero PDFDocument7 pages15 Classeur Zero PDFamoura0% (1)
- Demarrage Des Moteurs Prof V 2k6Document16 pagesDemarrage Des Moteurs Prof V 2k6havoc2012100% (1)
- Devoir de Synthèse N°2 - Math - 3ème Informatique (2012-2013) MR Lahbib GhalebDocument2 pagesDevoir de Synthèse N°2 - Math - 3ème Informatique (2012-2013) MR Lahbib GhalebKhili MouhamedPas encore d'évaluation
- CSI3120 Assignment 1Document4 pagesCSI3120 Assignment 1P o o P o o H e a dPas encore d'évaluation
- Tuyauteries: FlexibilitéDocument36 pagesTuyauteries: FlexibilitéمحمدلمينابراهيمالموريتانيPas encore d'évaluation
- Chap 5 Cours Transformation Nucléaire ComplétéDocument6 pagesChap 5 Cours Transformation Nucléaire Complétéhugo.gloaguen44Pas encore d'évaluation
- Vii DigitalisationDocument9 pagesVii DigitalisationMou MenPas encore d'évaluation