Vous aimerez peut-être aussi
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDocument28 pagesCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegPas encore d'évaluation
- Prise en Main de Microsoft Office Excel 2016Document713 pagesPrise en Main de Microsoft Office Excel 2016max80% (5)
- Canalisations de Gaz NaturelDocument120 pagesCanalisations de Gaz NaturelJean-David DelordPas encore d'évaluation
- 3 Partie Caractéristiques Des LubrifiantDocument32 pages3 Partie Caractéristiques Des Lubrifiantsamir belamriPas encore d'évaluation
- Devoir 3 62Document2 pagesDevoir 3 62yassirtm el outmaniPas encore d'évaluation
- Examen Corrige 01-2020Document6 pagesExamen Corrige 01-2020mido052011Pas encore d'évaluation
- 3638524Document2 pages3638524chaker albouchiPas encore d'évaluation
- Magazine 18 - 4M - (Ln-Exponentielle)Document2 pagesMagazine 18 - 4M - (Ln-Exponentielle)jhygjhgjh KaelPas encore d'évaluation
- GyaneDocument2 pagesGyaneRigis AkonPas encore d'évaluation
- 2017 Beceas Optiona EnonceDocument5 pages2017 Beceas Optiona EnonceBanoumou SaadPas encore d'évaluation
- Algebra TDDocument5 pagesAlgebra TDzain zagoraPas encore d'évaluation
- Chapitre 8: Espaces Vectoriels: DéfinitionsDocument24 pagesChapitre 8: Espaces Vectoriels: DéfinitionsIssa Housseini FadaPas encore d'évaluation
- DS1 2223Document2 pagesDS1 2223leonardtalleux926Pas encore d'évaluation
- 5f564404bfb2cITS - B - Maths - 2020 - SujetsDocument12 pages5f564404bfb2cITS - B - Maths - 2020 - Sujetstamba vieux tolnoPas encore d'évaluation
- Série D'exercises Ensembles Des NombresDocument2 pagesSérie D'exercises Ensembles Des NombresMeli RtaPas encore d'évaluation
- 22 - 23 Série 2 Analyse 5Document1 page22 - 23 Série 2 Analyse 5Moad MalmiPas encore d'évaluation
- 3 - Cours DeterminantsDocument7 pages3 - Cours Determinantsmakhloufiamine26Pas encore d'évaluation
- Sujet Maths Cnaem 2015Document7 pagesSujet Maths Cnaem 2015MiraiPas encore d'évaluation
- CNC2022 M2AlgDocument3 pagesCNC2022 M2AlgTaha El BakkaliPas encore d'évaluation
- Cours Econometrie L3Document23 pagesCours Econometrie L3Patrick Kobi100% (1)
- Sujet MathèmatiqueDocument3 pagesSujet MathèmatiqueIbrahel AlexeyPas encore d'évaluation
- Numi 4Document24 pagesNumi 4adnanePas encore d'évaluation
- Serie D'exercice 1ere S1Document6 pagesSerie D'exercice 1ere S1Yahya Aidara80% (5)
- CC 28 10 2021Document2 pagesCC 28 10 2021fayza mezrhabPas encore d'évaluation
- td2 Processus CorrigeDocument7 pagestd2 Processus CorrigekamilbouxaPas encore d'évaluation
- 87 Af 79Document6 pages87 Af 79MoustakimPas encore d'évaluation
- TD 2Document2 pagesTD 2lolobsPas encore d'évaluation
- Rev Tosel CorrectionDocument29 pagesRev Tosel CorrectionbhffuhPas encore d'évaluation
- La ContiniutéDocument3 pagesLa ContiniutéEL Yarchouhi EL BachirPas encore d'évaluation
- Stat Synth Se Listes Question Indicatives-2Document6 pagesStat Synth Se Listes Question Indicatives-2Thomas BastinPas encore d'évaluation
- MP3Maths 2Document8 pagesMP3Maths 2Alex N'zuePas encore d'évaluation
- Devoir 2019Document14 pagesDevoir 2019arsene-perelmanPas encore d'évaluation
- Series EntieresDocument2 pagesSeries Entieressalah eddinePas encore d'évaluation
- 11 12 Exo Rattrapage l3 MassDocument12 pages11 12 Exo Rattrapage l3 MassPaul MulumbaPas encore d'évaluation
- Bac Blanc Lpig Avril 2021 Série DDocument3 pagesBac Blanc Lpig Avril 2021 Série DPhineas100% (1)
- Exo Entrainement 13Document5 pagesExo Entrainement 13Naim ChPas encore d'évaluation
- Feuille D'excercices N 3 Analyse Num EriqueDocument3 pagesFeuille D'excercices N 3 Analyse Num EriqueBassem GhorbelPas encore d'évaluation
- Corrige - CC2 - Calcul Des Structures 2018 - 2019Document5 pagesCorrige - CC2 - Calcul Des Structures 2018 - 2019Aya ChikerPas encore d'évaluation
- UTBM Analyse-Numerique-Elementaire 2007 GMDocument4 pagesUTBM Analyse-Numerique-Elementaire 2007 GMX-shadowPas encore d'évaluation
- Sujet de Maths Bac C 2020Document4 pagesSujet de Maths Bac C 2020Mahfoudh El MezziPas encore d'évaluation
- 9.fonction Exponentielle - 2022Document5 pages9.fonction Exponentielle - 2022melekPas encore d'évaluation
- 460 1483831599 PDFDocument4 pages460 1483831599 PDFMohamed Saidi100% (1)
- Corrigé Examen EDHEC 2008 MathsDocument14 pagesCorrigé Examen EDHEC 2008 MathsBertrand GerardPas encore d'évaluation
- Chap 1Document9 pagesChap 1Charouine MŏhaMědPas encore d'évaluation
- Analyse Numérique Chap2Document14 pagesAnalyse Numérique Chap2Mael HounchePas encore d'évaluation
- Série N°6 2SM 2023-24 (LN)Document4 pagesSérie N°6 2SM 2023-24 (LN)yassine laelianiPas encore d'évaluation
- TD04 Interpol Approx Zwin EnsamDocument14 pagesTD04 Interpol Approx Zwin Ensammouniax3Pas encore d'évaluation
- 09 Syst Lin ExoDocument2 pages09 Syst Lin ExohmzbhiproPas encore d'évaluation
- 4sc ds1 t1 (7exp)Document18 pages4sc ds1 t1 (7exp)Ahmed benabdelkader100% (1)
- Cours-Esp VectDocument19 pagesCours-Esp Vectmenyar menyarPas encore d'évaluation
- Analyse Num SMIDocument11 pagesAnalyse Num SMIothmane hanaPas encore d'évaluation
- Analyse 3 (TD4)Document7 pagesAnalyse 3 (TD4)kribetyasserPas encore d'évaluation
- Corrigé 2020 OptimisationDocument5 pagesCorrigé 2020 OptimisationMohamed El AminePas encore d'évaluation
- Logarithme Neperien: X LN (U (X) )Document22 pagesLogarithme Neperien: X LN (U (X) )Admi BraccPas encore d'évaluation
- FeuilleSeriesEntieres 2Document2 pagesFeuilleSeriesEntieres 2mohamedkarmoudi99Pas encore d'évaluation
- Cours - Math - EXPONENTIELLEDocument7 pagesCours - Math - EXPONENTIELLEMourad MouradbensalemPas encore d'évaluation
- Epreuve D'analyse NumériqueDocument2 pagesEpreuve D'analyse NumériqueTchamiè AWIZOBAPas encore d'évaluation
- Ds 2 Moulay YoussefDocument4 pagesDs 2 Moulay Youssefcopie masterPas encore d'évaluation
- TD SeriesDocument3 pagesTD Seriesjacques Essomba MbassiPas encore d'évaluation
- Partiel MLG 17-18Document7 pagesPartiel MLG 17-18Farouk MhamdiPas encore d'évaluation
- 07 Valeur Absolue PlancheDocument2 pages07 Valeur Absolue PlancheFabricePas encore d'évaluation
- Cours Chapitre 3 Interpolation PolynomialeDocument5 pagesCours Chapitre 3 Interpolation Polynomialehamza dahbiPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Tube VentouriDocument10 pagesTube VentouriMohammed BoulbairPas encore d'évaluation
- RSE & EthiqueDocument6 pagesRSE & Ethiquealemor2369Pas encore d'évaluation
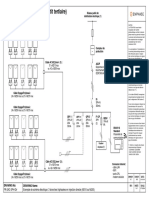
- 3 Branches Triphasées en Injection Directe M215 Ou M250Document1 page3 Branches Triphasées en Injection Directe M215 Ou M250MbgardPas encore d'évaluation
- AnnexeDocument168 pagesAnnexeMoez AliPas encore d'évaluation
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDocument2 pagesPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimPas encore d'évaluation
- Mesure de Compression Moteur Vers FinaleDocument46 pagesMesure de Compression Moteur Vers FinaleRaouf HarzallahPas encore d'évaluation
- Arval - Cofrastra 40Document16 pagesArval - Cofrastra 40helder.fradePas encore d'évaluation
- Controle Et Suivi Chantier RoutierhjhDocument14 pagesControle Et Suivi Chantier Routierhjhعثمان البريشيPas encore d'évaluation
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDocument28 pagesCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàPas encore d'évaluation
- Les Étapes de Formation Des Roches SédimentaireDocument2 pagesLes Étapes de Formation Des Roches Sédimentairehamada2002Pas encore d'évaluation
- Chapitre 1 LES OUTILS MATHEMATIQUESDocument9 pagesChapitre 1 LES OUTILS MATHEMATIQUESa.ddPas encore d'évaluation
- Af Sen GaeDocument42 pagesAf Sen GaeعبداللهبنزنوPas encore d'évaluation
- Exposé MDE Et Énergie RenouvelablesDocument12 pagesExposé MDE Et Énergie Renouvelablesromain fokamPas encore d'évaluation
- Observons:: Nature Du Complément Circonstanciel de TempsDocument2 pagesObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMPas encore d'évaluation
- Format Eur FrancaiseDocument1 pageFormat Eur FrancaiseAdnan NandaPas encore d'évaluation
- Correction DevoirDeSyntheseN3 1AS 2009 FinDocument8 pagesCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Exercice D'application Optique VDocument1 pageExercice D'application Optique VARDALAn MohamedPas encore d'évaluation
- Thèse Data IntegrityDocument83 pagesThèse Data IntegrityBasma YagoubiPas encore d'évaluation
- Exam. F.CDocument2 pagesExam. F.CmidsmasherPas encore d'évaluation
- The Cuban Missile CrisisDocument8 pagesThe Cuban Missile Crisismilan.bodis523Pas encore d'évaluation
- TFE Gustave KISHATU MWAMBA Version Finale-1Document112 pagesTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Cahier D Exercices Ile Aux Mots 8hDocument88 pagesCahier D Exercices Ile Aux Mots 8hCizPas encore d'évaluation
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Document6 pagesObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Pas encore d'évaluation
- Depliant ELM MasterDocument3 pagesDepliant ELM MasterYazid AbouchihabeddinePas encore d'évaluation
- Racines Carrees BaseDocument8 pagesRacines Carrees Basejulien9562Pas encore d'évaluation
- Introduction À La RobotiqueDocument19 pagesIntroduction À La RobotiqueRazzougui SarahPas encore d'évaluation