Vous aimerez peut-être aussi
- Mini Projet CapteurDocument20 pagesMini Projet CapteurGüz ElleştimePas encore d'évaluation
- ABBDDocument35 pagesABBDnourhen100% (1)
- Controle Physico-Chimique Des MédicamentsDocument21 pagesControle Physico-Chimique Des MédicamentsLinaMimosa75% (8)
- Méthodes-Spectrales 2018Document18 pagesMéthodes-Spectrales 2018Hayet BlhriPas encore d'évaluation
- Physique 4 Eme...Document41 pagesPhysique 4 Eme...toto TOTOROTO86% (7)
- Cours Télédéttction - El Harti PDFDocument142 pagesCours Télédéttction - El Harti PDFIbtiPas encore d'évaluation
- 537 Les Alarmes Anti IntrusionDocument7 pages537 Les Alarmes Anti IntrusionRacil Ezzedine100% (1)
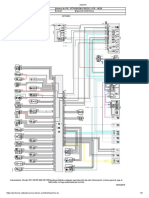
- Diagrama DS4Document3 pagesDiagrama DS4Fabian Lisandro AlvaradoPas encore d'évaluation
- Formation TeledetectionDocument4 pagesFormation TeledetectionElissar GemayelPas encore d'évaluation
- TP3 05.04.12Document4 pagesTP3 05.04.12Tran Thi Khanh Minh50% (2)
- Aut-Apollo-Orbis-Typical LoopDocument2 pagesAut-Apollo-Orbis-Typical LoopDerbel WalidPas encore d'évaluation
- Réenclencheur Automatique MT61SR, MT51, MT53 Et MT66UVDocument22 pagesRéenclencheur Automatique MT61SR, MT51, MT53 Et MT66UVkanouPas encore d'évaluation
- Manuel Olympus TG1Document88 pagesManuel Olympus TG1Frédéric MartinPas encore d'évaluation
- Catalogue Z ElioDocument14 pagesCatalogue Z ElioMansour MedPas encore d'évaluation
- - - - - - إمتحان تجريبي رقم 1 في مادة علوم المهندس 2014 2015 السنة الثانية بكالوريا علوم رياضية.pdf - 725Document18 pages- - - - - إمتحان تجريبي رقم 1 في مادة علوم المهندس 2014 2015 السنة الثانية بكالوريا علوم رياضية.pdf - 725khadija achtouiPas encore d'évaluation
- Brochure Alarme TechniqueDocument18 pagesBrochure Alarme TechniqueAbdelfetteh FriaaPas encore d'évaluation
- Serenity 150 Manuel Utilisateur FR V2Document10 pagesSerenity 150 Manuel Utilisateur FR V2angelbuenoherasPas encore d'évaluation
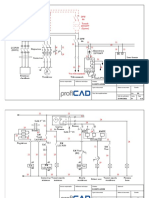
- Proficad 2Document2 pagesProficad 2Remi Joel Boris EssecofyPas encore d'évaluation
- Fotocellula Iprk 18 - FDocument4 pagesFotocellula Iprk 18 - Frebbaj abdrrahmanPas encore d'évaluation
- UM CT PSoC-DEV01 v1Document23 pagesUM CT PSoC-DEV01 v1Sellami WafaPas encore d'évaluation
- CyberPower NI DS US30010-40CNG FR FR v2Document2 pagesCyberPower NI DS US30010-40CNG FR FR v2Anonymous oyUAtpKPas encore d'évaluation
- Iroar User Guide Rev CDocument36 pagesIroar User Guide Rev CRaymond GrenierPas encore d'évaluation
- TP2 Simulations AnimeesDocument4 pagesTP2 Simulations AnimeesMoncef ComputerPas encore d'évaluation
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- Solution TV CollectifDocument20 pagesSolution TV CollectifSARL Zakawatt domoticPas encore d'évaluation
- CFR MANUEL-SIMPLIFIE MPXPRO MX10-MX30 v4.2 FR Rel1.7Document10 pagesCFR MANUEL-SIMPLIFIE MPXPRO MX10-MX30 v4.2 FR Rel1.7Pascal NicolletPas encore d'évaluation
- Video Sfera PDFDocument8 pagesVideo Sfera PDFTeam SportPas encore d'évaluation
- Rapport - Controle - Alger - Lac-NrjDocument33 pagesRapport - Controle - Alger - Lac-Nrjtati100% (1)
- Compte Tour Pour Moto / MobyletteDocument4 pagesCompte Tour Pour Moto / Mobylettecris eloPas encore d'évaluation
- AK-DK08U3 Installation.v1 - WebDocument2 pagesAK-DK08U3 Installation.v1 - Webvictor carreiraPas encore d'évaluation
- Catalogue ITAS 2004-05Document153 pagesCatalogue ITAS 2004-05vyshyPas encore d'évaluation
- S05-1-2 - Programmation Robot Mbot - Composants Et Fonctions (Elève)Document3 pagesS05-1-2 - Programmation Robot Mbot - Composants Et Fonctions (Elève)Prof Techno 82170Pas encore d'évaluation
- Fiche Savoir 01 Carte Arduino 20180301 PDFDocument2 pagesFiche Savoir 01 Carte Arduino 20180301 PDFJean Claude KonanPas encore d'évaluation
- L1A-4001-CRK-SPM-PLN-004-A Schéma Électrique de L'armoire Ascenseur 01, 02, 03Document34 pagesL1A-4001-CRK-SPM-PLN-004-A Schéma Électrique de L'armoire Ascenseur 01, 02, 03Mohamed AbdolahPas encore d'évaluation
- Fiche Technique: 1. PresentationDocument14 pagesFiche Technique: 1. PresentationJerome StollPas encore d'évaluation
- Installation de La Carte CAPAX-Xtd®: WWW - Infoconsult.tnDocument7 pagesInstallation de La Carte CAPAX-Xtd®: WWW - Infoconsult.tnSalah SalhiPas encore d'évaluation
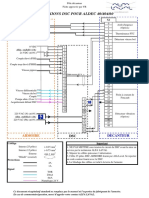
- 4.3. DSC - Connexions DSC - ALDEC 40 - 404 - 60Document1 page4.3. DSC - Connexions DSC - ALDEC 40 - 404 - 60Martin FoxxxPas encore d'évaluation
- Projet Refonte LANDocument2 pagesProjet Refonte LANMeriland MoolPas encore d'évaluation
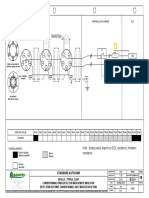
- Technique MalaxeurDocument19 pagesTechnique MalaxeurOssama DraouiPas encore d'évaluation
- Transmissao Voith Retarder 115 EDocument4 pagesTransmissao Voith Retarder 115 EAbdelhak EzPas encore d'évaluation
- Depannage N3000-FRDocument32 pagesDepannage N3000-FRHyo HyomaxPas encore d'évaluation
- Detecteur LaserDocument2 pagesDetecteur Laserguypaul1Pas encore d'évaluation
- Manual President Jackson ASC FR EN ES DEDocument44 pagesManual President Jackson ASC FR EN ES DEStivy E Sarmiento BPas encore d'évaluation
- PillulierDocument23 pagesPillulierAbdelghani BouchaalaPas encore d'évaluation
- Petite Ceinture Ferroviaire PresentationDocument148 pagesPetite Ceinture Ferroviaire Presentationamarsamah07Pas encore d'évaluation
- Latitude 6540 VALA0 La-9411pDocument77 pagesLatitude 6540 VALA0 La-9411pCiprianIfrimPas encore d'évaluation
- Telecom 1Document6 pagesTelecom 1Alain GeoffroyPas encore d'évaluation
- tp1 Prise en Main ArduinoDocument4 pagestp1 Prise en Main Arduinomoussa dethie sarrPas encore d'évaluation
- Zelio SR1Document22 pagesZelio SR1radhoinezerellyPas encore d'évaluation
- Sgear Usermanual FRDocument68 pagesSgear Usermanual FRalexoPas encore d'évaluation
- 1601 Modem Wifi Technicolor ME FRDocument24 pages1601 Modem Wifi Technicolor ME FRSamPas encore d'évaluation
- Alternateur c4Document5 pagesAlternateur c4fredliebautPas encore d'évaluation
- tp1 Prise en Main ArduinoDocument4 pagestp1 Prise en Main Arduinobecha.rejebPas encore d'évaluation
- Notice Technique Lecteur ArchitectDocument4 pagesNotice Technique Lecteur Architectb khnaguiPas encore d'évaluation
- Ecran TactileDocument4 pagesEcran Tactilefedelogement allierPas encore d'évaluation
- 最新版Document9 pages最新版雷宇Pas encore d'évaluation
- schemaelectriqueHTE2417Document1 pageschemaelectriqueHTE2417fab gerPas encore d'évaluation
- FR 200207Document188 pagesFR 200207Marco CaroubePas encore d'évaluation
- Liste de SignauxDocument5 pagesListe de SignauxraobenPas encore d'évaluation
- (143, 243) Level Limit Switch FTM51Document15 pages(143, 243) Level Limit Switch FTM51Bata ZivanovicPas encore d'évaluation
- Introduction Aux Réseaux de Communication IndustrielsDocument158 pagesIntroduction Aux Réseaux de Communication IndustrielsAngèle BoudaPas encore d'évaluation
- Câblage PinMos - VoltBoardDocument1 pageCâblage PinMos - VoltBoardMarco MilaniPas encore d'évaluation
- Fischer TechnickSmart-Beginner-Set - FRDocument39 pagesFischer TechnickSmart-Beginner-Set - FRdonatien.prevotPas encore d'évaluation
- DELMA Notice-Carte-Electronique-Polaris3Document24 pagesDELMA Notice-Carte-Electronique-Polaris3Tarek TarkanePas encore d'évaluation
- Notice Priseco 1piloteDocument2 pagesNotice Priseco 1pilotecianPas encore d'évaluation
- Fonctionnement DDocument14 pagesFonctionnement DAissam EL Ibrahimi BouayadPas encore d'évaluation
- CecileDocument211 pagesCecileIslem JalleliPas encore d'évaluation
- Caractérisation Des Polymères Par Spectrométrie OptiqueDocument15 pagesCaractérisation Des Polymères Par Spectrométrie OptiqueMeziane BouktitPas encore d'évaluation
- Le Robot ZumoDocument4 pagesLe Robot ZumoFaress MannPas encore d'évaluation
- 18c Capteurs OptDocument7 pages18c Capteurs OptKhalid AgdachPas encore d'évaluation
- Pourquoi OWC ?Document9 pagesPourquoi OWC ?Aissata DiopPas encore d'évaluation
- Catalogue Formations UT2A 2018 WebDocument44 pagesCatalogue Formations UT2A 2018 Webونزار عبد القادرPas encore d'évaluation
- Dossier Technique PortailDocument20 pagesDossier Technique Portailyouri59490Pas encore d'évaluation
- Dimlite PDFDocument28 pagesDimlite PDFSid Ali RABEHIPas encore d'évaluation
- Connaitre La Valeur Alimentaire de Ses FourragesDocument4 pagesConnaitre La Valeur Alimentaire de Ses FourragesEmna Ben Mustapha100% (1)
- 02 2012 FRDocument36 pages02 2012 FRSanti AgoPas encore d'évaluation
- Compte Redu IRDocument5 pagesCompte Redu IRhadil100% (1)
- TP Infrarouge 3Document10 pagesTP Infrarouge 3aggchaima31Pas encore d'évaluation
- La Detection PeripheriqueDocument17 pagesLa Detection PeripheriqueJipi RossPas encore d'évaluation
- Comment Fonctionne Un Thermometre Infrarouge DiaporamaDocument18 pagesComment Fonctionne Un Thermometre Infrarouge DiaporamaMirado Ram'sPas encore d'évaluation
- Chapitre2 Instru IndustrDocument68 pagesChapitre2 Instru IndustramalPas encore d'évaluation
- Theremino Spectrometer Construction FRADocument25 pagesTheremino Spectrometer Construction FRAshiwam birajdarPas encore d'évaluation
- Étude Détection Anti IncendierDocument21 pagesÉtude Détection Anti IncendierKadourSelloumPas encore d'évaluation
- Energieplus-Lesite - Be-Détecteurs de Mouvement Et de Présenceabsence EclairageDocument11 pagesEnergieplus-Lesite - Be-Détecteurs de Mouvement Et de Présenceabsence EclairageAMINE AIT ABBOUPas encore d'évaluation
- CompteurDocument8 pagesCompteurMohamed Amine HeniPas encore d'évaluation
- Fiche Techniique: Aio Il GammeDocument4 pagesFiche Techniique: Aio Il GammeCPSC SOLUTIONPas encore d'évaluation