Vous aimerez peut-être aussi
- Le Pert Et La ConstructionDocument125 pagesLe Pert Et La Constructionnadji187Pas encore d'évaluation
- CC1 R0 Travaux de TerrassementsDocument47 pagesCC1 R0 Travaux de Terrassementsluckyluke27Pas encore d'évaluation
- LogitraceDocument6 pagesLogitraceNERI000100% (1)
- 01 Informatique N2005Document60 pages01 Informatique N2005Danga DimogaliPas encore d'évaluation
- 01 - Introduction À PHPDocument15 pages01 - Introduction À PHPDjebbi SamiPas encore d'évaluation
- L'interopérabilité CAO/SIGDocument29 pagesL'interopérabilité CAO/SIGGraph LandPas encore d'évaluation
- Elegoo Super Starter Kit For UNO V1.0.19.09.17 FrançaisDocument161 pagesElegoo Super Starter Kit For UNO V1.0.19.09.17 FrançaisDonovan FrankyPas encore d'évaluation
- TP Impression 3D-2022Document14 pagesTP Impression 3D-2022Fatima Zahrae EzzejjariPas encore d'évaluation
- Impression 3DDocument38 pagesImpression 3DAris KHOULALENEPas encore d'évaluation
- Prototypage Rapide Et Fabrication AdditiveDocument9 pagesPrototypage Rapide Et Fabrication AdditivewatsdesignPas encore d'évaluation
- SecuriteDocument289 pagesSecuriteAnge LebeniPas encore d'évaluation
- Adduction GP en ZTDDocument38 pagesAdduction GP en ZTDayoub khalfaouiPas encore d'évaluation
- Ccna1 QuestionsDocument51 pagesCcna1 QuestionsLinkinx JbiliPas encore d'évaluation
- Boutons Et Descriptions: Outil de Programmation Pour ArcodeDocument3 pagesBoutons Et Descriptions: Outil de Programmation Pour ArcodeJalillou BnmrPas encore d'évaluation
- Récupération Informations Kali LinuxDocument4 pagesRécupération Informations Kali LinuxHakem TahaPas encore d'évaluation
- s2019 Caplp Externe Genie Meca Msma 1 1 1115549Document19 pagess2019 Caplp Externe Genie Meca Msma 1 1 1115549baPas encore d'évaluation
- Caplp Ext 2022 GM Opt Prod Epreuve 1Document80 pagesCaplp Ext 2022 GM Opt Prod Epreuve 1Silver679Pas encore d'évaluation
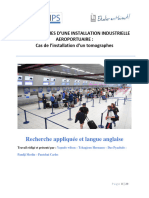
- Projet de Recherche Sur Le Tomographe AeroportuaireDocument29 pagesProjet de Recherche Sur Le Tomographe Aeroportuaire75bjvzrp8vPas encore d'évaluation
- Ouvrage 20Document3 pagesOuvrage 20HKDOCUMENTPas encore d'évaluation
- BCC 9Document10 pagesBCC 9MARYAM FRIDPas encore d'évaluation
- Marchand MaximeDocument82 pagesMarchand MaximeKouadio Jean Luc YobouéPas encore d'évaluation
- Ouvrage 9Document4 pagesOuvrage 9HKDOCUMENTPas encore d'évaluation
- Article AEFA 13Document13 pagesArticle AEFA 13Wassim MannaiPas encore d'évaluation
- Notes de Cours UC 2013Document65 pagesNotes de Cours UC 2013Ali EL KihelPas encore d'évaluation
- nc2Document36 pagesnc2Mese CipresPas encore d'évaluation
- Caplp Ext 2023 GM Opt Prod Epreuve 1Document87 pagesCaplp Ext 2023 GM Opt Prod Epreuve 1Silver679Pas encore d'évaluation
- TP Impression 3dDocument9 pagesTP Impression 3dRachedi AbdouPas encore d'évaluation
- Sciences de L'ingenieur SDocument22 pagesSciences de L'ingenieur SLetudiant.frPas encore d'évaluation
- 02 Historique de L Impression 3D Serge CORBELDocument44 pages02 Historique de L Impression 3D Serge CORBELHAMZACHERIFEPas encore d'évaluation
- 2020 ALTAMETRIS IA Classification StageDocument6 pages2020 ALTAMETRIS IA Classification StageImene TarakliPas encore d'évaluation
- Rapport de StageDocument12 pagesRapport de StageMoatez BoukamchaPas encore d'évaluation
- Projet InfoDocument14 pagesProjet InfoABLAM JEAN PAUL SAMATIPas encore d'évaluation
- Cahier Charges Type Echafaudage de Pied 08 12 2010Document34 pagesCahier Charges Type Echafaudage de Pied 08 12 2010Ralf LoPas encore d'évaluation
- 2 Fabrication AdditiveDocument36 pages2 Fabrication AdditiveParc ElyesPas encore d'évaluation
- Les IngénieursDocument5 pagesLes IngénieursPascalinePas encore d'évaluation
- Manuel 2 Géné X 3.0Document37 pagesManuel 2 Géné X 3.0labakoum badr-eddinePas encore d'évaluation
- Rapport de Stage I3Document47 pagesRapport de Stage I3assane2mcsPas encore d'évaluation
- S632+633 TP AgrafeuseDocument3 pagesS632+633 TP AgrafeuseJean-Pierre PeffierPas encore d'évaluation
- Mathematical Programming Methods For Complex Cutting Problems Quentin ViaudDocument185 pagesMathematical Programming Methods For Complex Cutting Problems Quentin Viaudomega uniquePas encore d'évaluation
- Fillion FinalDocument14 pagesFillion FinalSosson TadadjeuPas encore d'évaluation
- Nemo Tool Nemo Analyzer RF 05-10-28 V3Document9 pagesNemo Tool Nemo Analyzer RF 05-10-28 V3MiradoniainaRakotoarimananaPas encore d'évaluation
- Canevas Budget LEPA Equipe3OKDocument12 pagesCanevas Budget LEPA Equipe3OKAbdelhalim Taieb BrahimPas encore d'évaluation
- Imprimante RApportDocument14 pagesImprimante RApportHoussem HassanetPas encore d'évaluation
- Prototypage Rapide Corentin LeboeufDocument10 pagesPrototypage Rapide Corentin LeboeufCoco GuitaristePas encore d'évaluation
- Chapitre 1Document13 pagesChapitre 1doumbo39Pas encore d'évaluation
- Caractérisation Sandwich en FlexionDocument8 pagesCaractérisation Sandwich en FlexionNico PonsPas encore d'évaluation
- Rapport These-Azaouzi UsinageDocument186 pagesRapport These-Azaouzi UsinageEnid EdaasPas encore d'évaluation
- Devoir Préparatoire PDFDocument12 pagesDevoir Préparatoire PDFSabah elfallahPas encore d'évaluation
- Chapitre 1 Et 2Document49 pagesChapitre 1 Et 2Zied AbidiPas encore d'évaluation
- Presentation Technique PDFDocument6 pagesPresentation Technique PDFSmail ZennouchePas encore d'évaluation
- Organisation Des Chantiers de Travaux Publics - TIPesp-c112Document1 pageOrganisation Des Chantiers de Travaux Publics - TIPesp-c112Abdessalem MessaïPas encore d'évaluation
- Projets Inter - 2ADocument3 pagesProjets Inter - 2AAminata MbenguePas encore d'évaluation
- Rapport - MPETEYEDocument36 pagesRapport - MPETEYEJacintho MPETEYEPas encore d'évaluation
- Mini Projet M1.Document3 pagesMini Projet M1.Slimane ZadoudPas encore d'évaluation
- Identification Des Risques Pour Les Projets de Construction: Revue Des Pratiques Internationales Et PropositionsDocument11 pagesIdentification Des Risques Pour Les Projets de Construction: Revue Des Pratiques Internationales Et Propositionsok59Pas encore d'évaluation
- TP 3 FluentDocument6 pagesTP 3 FluentbelgecemPas encore d'évaluation
- Methodes Alternatives Gammagraphie IrDocument13 pagesMethodes Alternatives Gammagraphie IrdimachampionPas encore d'évaluation
- SaraJana LudovicyDocument35 pagesSaraJana LudovicyTarek EzzatPas encore d'évaluation
- TH2022UEFL2035Document125 pagesTH2022UEFL2035santatramichaelrPas encore d'évaluation
- Fiches MétiersDocument8 pagesFiches MétiersfrereteidzalPas encore d'évaluation
- Guide Achat DebimetreDocument12 pagesGuide Achat Debimetrethierrystiev100% (1)
- Formation Networks GPDocument30 pagesFormation Networks GPayoub khalfaoui100% (1)
- Dossier TechniqueDocument20 pagesDossier Techniquealexpereira1307Pas encore d'évaluation
- CHAPITRE 3 Excel PDFDocument10 pagesCHAPITRE 3 Excel PDFnishanth abirPas encore d'évaluation
- 04 NombresDocument11 pages04 NombreskghkPas encore d'évaluation
- Le Modèle RelationnelDocument13 pagesLe Modèle RelationnelElana FridiPas encore d'évaluation
- Cours7 POODocument36 pagesCours7 POOYoucef BensenouciPas encore d'évaluation
- Présentation Portail Salarié 2Document5 pagesPrésentation Portail Salarié 2tina tavakolli afshinPas encore d'évaluation
- Expose LinuxDocument20 pagesExpose LinuxRachid ElmlilassPas encore d'évaluation
- Cours BDDocument35 pagesCours BDAngèle BoudaPas encore d'évaluation
- Chapitre 4 Études de Cas Sur Steve JobsDocument5 pagesChapitre 4 Études de Cas Sur Steve JobsAnass DrihmiPas encore d'évaluation
- Bts SN IrDocument10 pagesBts SN IrRahim AbbaPas encore d'évaluation
- RPI2DMD 2 Quick Start Guide March 2020 V2Document4 pagesRPI2DMD 2 Quick Start Guide March 2020 V2willoute1Pas encore d'évaluation
- Correction Série 7Document4 pagesCorrection Série 7soumayaPas encore d'évaluation
- TD MERISE Ok1Document12 pagesTD MERISE Ok1Uziel CHIMIPas encore d'évaluation
- Objectif 1.2 - Configurer Microsoft WindowsDocument180 pagesObjectif 1.2 - Configurer Microsoft WindowsIbrahima SkPas encore d'évaluation
- Listes Des Candidats Retenus Et Listes D'attente-IngénieursDocument8 pagesListes Des Candidats Retenus Et Listes D'attente-Ingénieursanas gouiziPas encore d'évaluation
- Notion de Lcd-OracleDocument3 pagesNotion de Lcd-OracleFatima Zahrae AminePas encore d'évaluation
- CSharp Travaux Pratiques: AsciiDotsDocument26 pagesCSharp Travaux Pratiques: AsciiDotsTheDeath 9999Pas encore d'évaluation
- Cahier 1Document4 pagesCahier 1Haythem JbelyPas encore d'évaluation
- Activité Esp32 1année2021-2022Document3 pagesActivité Esp32 1année2021-2022Besma KhannoussiPas encore d'évaluation
- Ascotel 2025 2045 2065Document79 pagesAscotel 2025 2045 2065maxenceroger62118Pas encore d'évaluation
- Cours Génie LogicielDocument121 pagesCours Génie LogicielYves BongongoPas encore d'évaluation
- TP - IRT3 SRS - Securisation Du Tunnel GRE Avec IKEv1Document8 pagesTP - IRT3 SRS - Securisation Du Tunnel GRE Avec IKEv1Teguebzanga ZidaPas encore d'évaluation
- Atelier1 Installation EnvironnementDocument12 pagesAtelier1 Installation EnvironnementMarwenCherifPas encore d'évaluation
- Chap5AnalyseSyntaxique MethodesAscendantes 1Document15 pagesChap5AnalyseSyntaxique MethodesAscendantes 1inesPas encore d'évaluation
- CBD Base de Donnee MeriseDocument177 pagesCBD Base de Donnee MerisechridtelyseePas encore d'évaluation
- Ao 1Document33 pagesAo 1Anonymous Wpl47Bwu4Pas encore d'évaluation