Vous aimerez peut-être aussi
- Commande PrédictiveDocument2 pagesCommande PrédictiveidefPas encore d'évaluation
- Feuille TageDocument30 pagesFeuille TageMouhat OuadiaPas encore d'évaluation
- Memoire PidDocument55 pagesMemoire Pidهارد بوز100% (2)
- Pneumatique ElkhalidyDocument125 pagesPneumatique ElkhalidyAymen Ben Ammar100% (3)
- Introduction Automatisme 1Document6 pagesIntroduction Automatisme 1DenisePas encore d'évaluation
- MceDocument3 pagesMceWalidSallemPas encore d'évaluation
- Etude Dun Regulateur Pid A Action Integrale Floue de Systemes Dynamiques 2Document7 pagesEtude Dun Regulateur Pid A Action Integrale Floue de Systemes Dynamiques 2youcef difPas encore d'évaluation
- Introduction Revue de La LittératureDocument8 pagesIntroduction Revue de La LittératureAymard MougouPas encore d'évaluation
- RegulationDocument9 pagesRegulationaymenabderrahmen9Pas encore d'évaluation
- Cours Api Complet 24Document45 pagesCours Api Complet 24anacer55100% (1)
- Chap 1Document14 pagesChap 1i aliliPas encore d'évaluation
- 2020-12-21-Introduction Aux Systèmes AutomatisésDocument3 pages2020-12-21-Introduction Aux Systèmes AutomatisésJake Paul PranksPas encore d'évaluation
- Cours Architecture Des Systemes Automatises PDFDocument89 pagesCours Architecture Des Systemes Automatises PDFChigara KawtherPas encore d'évaluation
- Cours Régulation Des Systèmes Chap1 Sari Rev1Document12 pagesCours Régulation Des Systèmes Chap1 Sari Rev1Abd el moumen HemiciPas encore d'évaluation
- Cours Auto Ima1Document109 pagesCours Auto Ima1Ahmed HamdiPas encore d'évaluation
- 05Document3 pages05Baha AhmedPas encore d'évaluation
- ET305 - Commande Adaptative - 2014 ImpDocument9 pagesET305 - Commande Adaptative - 2014 ImpMehdi YahiPas encore d'évaluation
- MSO-cours TB - Tome 1Document127 pagesMSO-cours TB - Tome 1Abdennour FishermanPas encore d'évaluation
- FR Technical Guide No 1 REVC PDFDocument36 pagesFR Technical Guide No 1 REVC PDFDerrouch AbderrahmanePas encore d'évaluation
- Chapitre-III-Automates Programmables Industriels - 1Document14 pagesChapitre-III-Automates Programmables Industriels - 1larryPas encore d'évaluation
- Indpet3an Lessons-Regulation Industrielle ZennirDocument100 pagesIndpet3an Lessons-Regulation Industrielle ZennirWidadPas encore d'évaluation
- Module 17 Installation Reparation Un Systeme Decommande EctroDocument151 pagesModule 17 Installation Reparation Un Systeme Decommande EctroAnonymous A13Lxz2hT0% (1)
- Chapitre1 Dimensionnement Des Systèmes IndustrielsDocument15 pagesChapitre1 Dimensionnement Des Systèmes IndustrielsWill Smith TaherPas encore d'évaluation
- REG20Document3 pagesREG20fuceneyantao7Pas encore d'évaluation
- Automatique Continu Numerique OuldbouamamaDocument339 pagesAutomatique Continu Numerique OuldbouamamaRashid Elaychii67% (3)
- Introduction GénéraleDocument3 pagesIntroduction GénéraleMohammed Amdjed DjebliPas encore d'évaluation
- Conclusion GénéraleDocument1 pageConclusion GénéraleIdkan NãïmaPas encore d'évaluation
- cours+de+Technologie+Mecanique+25 09 06+séance+1Document37 pagescours+de+Technologie+Mecanique+25 09 06+séance+1Sissi MissiPas encore d'évaluation
- M18 Systèmes Automatisés FM TSMFMDocument127 pagesM18 Systèmes Automatisés FM TSMFMNABIL ELKHARRASPas encore d'évaluation
- M13 Mise en Œuvre D'un Processus de DiagnosticDocument46 pagesM13 Mise en Œuvre D'un Processus de DiagnosticKc StoriesPas encore d'évaluation
- Cours 1..Document54 pagesCours 1..Na Dir Sayah100% (1)
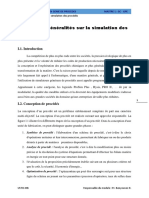
- Notions Sur La Simulation Des Procédés ChimiquesDocument7 pagesNotions Sur La Simulation Des Procédés ChimiquesSöû SøùSøú Mîã100% (1)
- Mémoire de Juin 2010. PID Versus PFCDocument13 pagesMémoire de Juin 2010. PID Versus PFCFerhat BOUAMARAPas encore d'évaluation
- Regulatione en Genie Climatique-FiliereDocument29 pagesRegulatione en Genie Climatique-FiliereCR Grezmanne100% (1)
- CHAPITRE I - Simulateurs en GP - 2021Document9 pagesCHAPITRE I - Simulateurs en GP - 2021Roudaina BenzeguirPas encore d'évaluation
- Groupe N°22 - L'automatisme IndustrielleDocument13 pagesGroupe N°22 - L'automatisme IndustrielleOverDoc100% (2)
- ContinueDocument2 pagesContinueYahya BortalPas encore d'évaluation
- (Ads) (CO) Analyse Des SystemesDocument23 pages(Ads) (CO) Analyse Des SystemesSimoMonkadPas encore d'évaluation
- Automatismes Et Informatique IndustrielleDocument2 pagesAutomatismes Et Informatique IndustrielleDiaa Eddine Boudiaf100% (2)
- Norme AutomatismeDocument5 pagesNorme Automatismemohamed demilPas encore d'évaluation
- Installation Reparation Commande Electronique de MoteursDocument129 pagesInstallation Reparation Commande Electronique de MoteursMohammed ChaabatePas encore d'évaluation
- Rapport ECC Template 12Document7 pagesRapport ECC Template 12فرحة كمالPas encore d'évaluation
- Cours - API - Partie IIDocument41 pagesCours - API - Partie IIAkram BENACHOURPas encore d'évaluation
- Automatisme Résumé PDFDocument6 pagesAutomatisme Résumé PDFIlyas BoutouahanPas encore d'évaluation
- MEC743Document4 pagesMEC743arnaudmarielPas encore d'évaluation
- Polycopie TP Simulation UstoDocument23 pagesPolycopie TP Simulation UstoYahia Didi100% (2)
- M24 - Utilisation de L'automate Programmable GE-ESA PDFDocument75 pagesM24 - Utilisation de L'automate Programmable GE-ESA PDFRedouane Amiri100% (1)
- Informatique physique: Explorer la vision par ordinateur dans l'informatique physiqueD'EverandInformatique physique: Explorer la vision par ordinateur dans l'informatique physiquePas encore d'évaluation
- Modélisation géométrique: Explorer la modélisation géométrique en vision par ordinateurD'EverandModélisation géométrique: Explorer la modélisation géométrique en vision par ordinateurPas encore d'évaluation
- Spring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplateD'EverandSpring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplatePas encore d'évaluation
- Réseau de capteurs visuels: Explorer la puissance des réseaux de capteurs visuels en vision par ordinateurD'EverandRéseau de capteurs visuels: Explorer la puissance des réseaux de capteurs visuels en vision par ordinateurPas encore d'évaluation
- Maîtriser PowerShell: Guide Complet: La collection informatiqueD'EverandMaîtriser PowerShell: Guide Complet: La collection informatiquePas encore d'évaluation
- Python pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasD'EverandPython pour Débutants : Guide Complet pour Apprendre la Programmation Pas à PasPas encore d'évaluation
- Developing Cost Estimates for Environmental Remediation ProjectsD'EverandDeveloping Cost Estimates for Environmental Remediation ProjectsPas encore d'évaluation
- Projets du Futur : Guide Complet des Méthodes de Conduite InnovantesD'EverandProjets du Futur : Guide Complet des Méthodes de Conduite InnovantesPas encore d'évaluation
- Maîtriser le Développement Full Stack : Du Front-End Éblouissant au Back-End RobusteD'EverandMaîtriser le Développement Full Stack : Du Front-End Éblouissant au Back-End RobustePas encore d'évaluation
- Planification et contrôle de la production et des stocks : techniques et pratiquesD'EverandPlanification et contrôle de la production et des stocks : techniques et pratiquesÉvaluation : 3 sur 5 étoiles3/5 (1)
- Vision par ordinateur: Explorer les profondeurs de la vision par ordinateurD'EverandVision par ordinateur: Explorer les profondeurs de la vision par ordinateurPas encore d'évaluation
- BDD No SQL-2023Document42 pagesBDD No SQL-2023ktyetoto55Pas encore d'évaluation
- Rapport Intégral de Diagnostic - Consulting IT PDFDocument11 pagesRapport Intégral de Diagnostic - Consulting IT PDFNataliaÁngelPas encore d'évaluation
- Expose BIG DATADocument13 pagesExpose BIG DATAmartial tagaPas encore d'évaluation
- La Communauté OWASPDocument5 pagesLa Communauté OWASPRania MenzerPas encore d'évaluation
- Mi 3lic16 Ratr Genie - Logiciel13 PDFDocument2 pagesMi 3lic16 Ratr Genie - Logiciel13 PDFmugi wara100% (1)
- Cours Chapitre 1 SNTDocument5 pagesCours Chapitre 1 SNTchloclolittlePas encore d'évaluation
- Chapitre 3. La Sécurité Du Pare-Feu (Firewall) (Mode de Compatibilité)Document21 pagesChapitre 3. La Sécurité Du Pare-Feu (Firewall) (Mode de Compatibilité)Děmøïšěllë RãnPas encore d'évaluation
- Test 1 2020 2021Document3 pagesTest 1 2020 2021Chaima BenabdallahPas encore d'évaluation
- R2.02 - Cours 2a - JavaFX - Developpement DinterfaceDocument17 pagesR2.02 - Cours 2a - JavaFX - Developpement DinterfaceTom DPas encore d'évaluation
- Edt N1 SM2 Isga - 22-23-1 PDFDocument8 pagesEdt N1 SM2 Isga - 22-23-1 PDFBakary IssaPas encore d'évaluation
- TP 1 Techniques Et Supports TXDocument2 pagesTP 1 Techniques Et Supports TXJOEL NDJAYICKPas encore d'évaluation
- 004-SÃrie TP N 04Document1 page004-SÃrie TP N 04donkihotinazimPas encore d'évaluation
- Diplome D'Ingenieur de Conception: 8 PromotionDocument122 pagesDiplome D'Ingenieur de Conception: 8 PromotionmianPas encore d'évaluation
- 12qs23dwin FRDocument86 pages12qs23dwin FRgipson cashPas encore d'évaluation
- Chapitre 4 Precision Performances Regime TransitoireDocument8 pagesChapitre 4 Precision Performances Regime TransitoirePierre GoitaPas encore d'évaluation
- Linux - Corrections Des Exercices Du TP N°1Document1 pageLinux - Corrections Des Exercices Du TP N°1Bertrand Wãrí0% (1)
- Commande Open - VMSDocument2 pagesCommande Open - VMS6wrgpcs6ngPas encore d'évaluation
- 3 - Projet EcoBoxDocument60 pages3 - Projet EcoBoxAnouar AlamiPas encore d'évaluation
- Rapport de PFEDocument51 pagesRapport de PFEMahranBarhoumiPas encore d'évaluation
- Remote Method InvocationDocument22 pagesRemote Method InvocationYin YangPas encore d'évaluation
- DLX2Document13 pagesDLX2fiRas kRPas encore d'évaluation
- Vlan 05 FinalDocument10 pagesVlan 05 FinalParfaite ChiokoPas encore d'évaluation
- 2.9.2 Packet Tracer - Basic Switch and End Device Configuration - Physical Mode - FR FRDocument4 pages2.9.2 Packet Tracer - Basic Switch and End Device Configuration - Physical Mode - FR FRArmel AmanaPas encore d'évaluation
- ThéoriqueDocument5 pagesThéoriqueoukhdidjaayoubPas encore d'évaluation
- Doua Wazifa CKBDocument27 pagesDoua Wazifa CKBAmadou SOWPas encore d'évaluation
- Table Des Matières: Durée Examinateur: MAHOU ESSIMI A. Année Académique 2021-2022 Semestre IIDocument25 pagesTable Des Matières: Durée Examinateur: MAHOU ESSIMI A. Année Académique 2021-2022 Semestre IINicoletta NouetagniPas encore d'évaluation
- Compte Rendu Tp4 Traitement D'Image: Restauration Par FiltrageDocument4 pagesCompte Rendu Tp4 Traitement D'Image: Restauration Par FiltrageAla Eddine WerghemmiPas encore d'évaluation
- BTM - Guide D'installation FRDocument19 pagesBTM - Guide D'installation FRJacques ZinsePas encore d'évaluation
- Cours4 Merea Plne Meth Sep Eval (B&B)Document67 pagesCours4 Merea Plne Meth Sep Eval (B&B)Maryam YammPas encore d'évaluation
- Rapport de Stage Iai Integc 2012 2013Document95 pagesRapport de Stage Iai Integc 2012 2013labowaPas encore d'évaluation