Vous aimerez peut-être aussi
- Mémoire de Juin 2010. PID Versus PFCDocument13 pagesMémoire de Juin 2010. PID Versus PFCFerhat BOUAMARAPas encore d'évaluation
- 5 Synthèse Systèmes de Commande E PDFDocument51 pages5 Synthèse Systèmes de Commande E PDFrajaa latifiPas encore d'évaluation
- 1 Généralités - Systèmes de CommandeDocument67 pages1 Généralités - Systèmes de Commanderajaa latifi100% (2)
- Avec RSTDocument65 pagesAvec RSTzinebPas encore d'évaluation
- Chapitre 1et 2 REGULATIONDocument40 pagesChapitre 1et 2 REGULATIONAmal ChafaiiPas encore d'évaluation
- Supervision Des Systemes Industriels Ouldbouamama1Document329 pagesSupervision Des Systemes Industriels Ouldbouamama1Hajar Chouiyakh100% (2)
- Systèmes de Contrôle IndustrielDocument141 pagesSystèmes de Contrôle Industrielabdelmoutalib salim100% (2)
- Cours D'automatique, Représentation D'état Partie IDocument16 pagesCours D'automatique, Représentation D'état Partie IAdams KaborePas encore d'évaluation
- Cours 1..Document54 pagesCours 1..Na Dir Sayah100% (1)
- 05Document3 pages05Baha AhmedPas encore d'évaluation
- Commande Avancee PDFDocument391 pagesCommande Avancee PDFAdil AbouelhassanPas encore d'évaluation
- Cours Api Complet 24Document45 pagesCours Api Complet 24anacer55100% (1)
- Généralités Sur La Commande NumériqueDocument32 pagesGénéralités Sur La Commande Numériquerajaa latifiPas encore d'évaluation
- GlobalGarden Kundendiensthandbuch 102-122 Wsm102 FR 2006Document93 pagesGlobalGarden Kundendiensthandbuch 102-122 Wsm102 FR 2006wz4qqxchdxPas encore d'évaluation
- Automatisation Des Systemes Industriels-2020 PDFDocument84 pagesAutomatisation Des Systemes Industriels-2020 PDFRamdani AhmedPas encore d'évaluation
- M204 Controleur Chapitre1 ModifiéDocument21 pagesM204 Controleur Chapitre1 Modifiéahmad ahmadPas encore d'évaluation
- Chap 1 Introduction AutomatismeDocument3 pagesChap 1 Introduction Automatismemarouanehaddiya10Pas encore d'évaluation
- DDC - Généralités PDFDocument30 pagesDDC - Généralités PDFAbdellah MhimidiPas encore d'évaluation
- Régulation IndustrielleDocument2 pagesRégulation IndustrielleDiaa Eddine BoudiafPas encore d'évaluation
- Indpet3an Lessons-Regulation Industrielle ZennirDocument100 pagesIndpet3an Lessons-Regulation Industrielle ZennirWidadPas encore d'évaluation
- Rapport de Stage 2Document38 pagesRapport de Stage 2Ibrahima COLYPas encore d'évaluation
- TP de SystelmeDocument8 pagesTP de SystelmeMpangaPas encore d'évaluation
- Régulation IndustrielleDocument2 pagesRégulation IndustrielleMagraoui AbdelkadirPas encore d'évaluation
- REG20Document3 pagesREG20fuceneyantao7Pas encore d'évaluation
- M13 Mise en Œuvre D - Un Processus de DiagnosticDocument44 pagesM13 Mise en Œuvre D - Un Processus de DiagnosticAbdo Abdo100% (1)
- 04Document2 pages04Baha AhmedPas encore d'évaluation
- Cours Régulation Industrielle - Chap 1&2Document58 pagesCours Régulation Industrielle - Chap 1&2Lghazi OumssadPas encore d'évaluation
- Chapitre 1 Generalites Systemes Automatises Production PDFDocument8 pagesChapitre 1 Generalites Systemes Automatises Production PDFLéandre Ettekri NDRI100% (2)
- Cours+TD+DS Régulation-et-AutomatismeDocument158 pagesCours+TD+DS Régulation-et-AutomatismeLghazi OumssadPas encore d'évaluation
- Sécurité Fonctionelle STEP - ConsultationDocument58 pagesSécurité Fonctionelle STEP - ConsultationmhalbabaPas encore d'évaluation
- Automatisme Et Régulation DUT GTE1 - (EBook) DR NDAME Et EQUIPEDocument56 pagesAutomatisme Et Régulation DUT GTE1 - (EBook) DR NDAME Et EQUIPEYann NOHNOHPas encore d'évaluation
- 1 L'Historique, Et La Régulation Automatique Aujourd'huiDocument21 pages1 L'Historique, Et La Régulation Automatique Aujourd'huiRadouan SahbPas encore d'évaluation
- Chapitre 1Document27 pagesChapitre 1bouthayna slimaniPas encore d'évaluation
- Chapitre 1Document27 pagesChapitre 1Licence Spécialisée Idbd EnsakPas encore d'évaluation
- Chapitre 1Document27 pagesChapitre 1Hajji Mohamed KarimPas encore d'évaluation
- Mini Projet RégulationDocument18 pagesMini Projet RégulationHanae BoutabaPas encore d'évaluation
- Cours Régulation Fev 2016Document107 pagesCours Régulation Fev 2016best musicPas encore d'évaluation
- Regulatione en Genie Climatique-FiliereDocument29 pagesRegulatione en Genie Climatique-FiliereCR Grezmanne100% (1)
- Seminaire Regulation 4-8 Mars 2006 - FinalDocument68 pagesSeminaire Regulation 4-8 Mars 2006 - FinalSarra BÉCHIRIPas encore d'évaluation
- Introduction Revue de La LittératureDocument8 pagesIntroduction Revue de La LittératureAymard MougouPas encore d'évaluation
- Cours SAP Master EESTDocument32 pagesCours SAP Master EESTamadochico581Pas encore d'évaluation
- Feuille TageDocument30 pagesFeuille TageMouhat OuadiaPas encore d'évaluation
- 02Document3 pages02Baha AhmedPas encore d'évaluation
- Chapitre1 AutomatismeDocument9 pagesChapitre1 AutomatismeWael Maatoug100% (1)
- M13 Mise en Œuvre D'un Processus de DiagnosticDocument46 pagesM13 Mise en Œuvre D'un Processus de DiagnosticKc StoriesPas encore d'évaluation
- Chapitre 1 FinalDocument23 pagesChapitre 1 Finalato ndongo fabricePas encore d'évaluation
- Automatismes IndustrielsDocument42 pagesAutomatismes IndustrielsWiame Bouyoussef100% (1)
- Chapitre 01Document8 pagesChapitre 01TatiekamPas encore d'évaluation
- Cours Syst AsservisDocument46 pagesCours Syst Asservisisraa meriemPas encore d'évaluation
- POLY BOUAMAMA EEA Supervision PDFDocument133 pagesPOLY BOUAMAMA EEA Supervision PDFAdyX2Pas encore d'évaluation
- Commande Des Systèmes Ind CH1 1Document25 pagesCommande Des Systèmes Ind CH1 1tchoudjafandja100% (1)
- Rgulation Et Contrle S CDocument92 pagesRgulation Et Contrle S COmar Rajhi100% (1)
- 1 AutomatismeDocument16 pages1 AutomatismeAYMAN COUKIPas encore d'évaluation
- Chapite - 1 Introduction-1Document17 pagesChapite - 1 Introduction-1Jeremie Ivann NgoyePas encore d'évaluation
- Pressostat Detendeurs Detecteurs ElectrovanneDocument100 pagesPressostat Detendeurs Detecteurs ElectrovanneYasmina BethyPas encore d'évaluation
- Chapitre1 Notionsde Base 2020Document44 pagesChapitre1 Notionsde Base 2020Med BahaPas encore d'évaluation
- Developing Cost Estimates for Environmental Remediation ProjectsD'EverandDeveloping Cost Estimates for Environmental Remediation ProjectsPas encore d'évaluation
- Planification et contrôle de la production et des stocks : techniques et pratiquesD'EverandPlanification et contrôle de la production et des stocks : techniques et pratiquesÉvaluation : 3 sur 5 étoiles3/5 (1)
- PDF AutoDocument37 pagesPDF AutoAbd el moumen HemiciPas encore d'évaluation
- Serie n2 Map84Document5 pagesSerie n2 Map84Abd el moumen HemiciPas encore d'évaluation
- TD1Document1 pageTD1Abd el moumen HemiciPas encore d'évaluation
- NIVEAUDocument6 pagesNIVEAUAbd el moumen HemiciPas encore d'évaluation
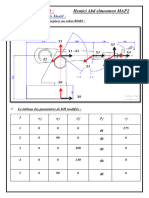
- Devoir Robotique MAP2Document8 pagesDevoir Robotique MAP2Abd el moumen HemiciPas encore d'évaluation
- TP 1 CommandeDocument9 pagesTP 1 CommandeAbd el moumen HemiciPas encore d'évaluation
- TP Acm RapportDocument16 pagesTP Acm RapportAbd el moumen HemiciPas encore d'évaluation
- La Verite Est Que Le Silala N'a Jamais Été Une Riviere TransfrontalierDocument10 pagesLa Verite Est Que Le Silala N'a Jamais Été Une Riviere TransfrontalierJorgeZambranaPas encore d'évaluation
- Chapitre 3-Equations DifférentiellesDocument23 pagesChapitre 3-Equations DifférentiellesLøü LõüPas encore d'évaluation
- Le Dauphin Vol 68-Juin 2011Document44 pagesLe Dauphin Vol 68-Juin 2011GCACQPas encore d'évaluation
- 3-Patinette Electrique PDFDocument4 pages3-Patinette Electrique PDFAhmed AbenPas encore d'évaluation
- Chapitre - 1-Présontation-Du-ProjetDocument21 pagesChapitre - 1-Présontation-Du-ProjetAbdelhak GuettiPas encore d'évaluation
- Imagerie OA 2016 1Document95 pagesImagerie OA 2016 1Flora ZePas encore d'évaluation
- 4 Améliorer PRONONCIATION ANGLAISEDocument6 pages4 Améliorer PRONONCIATION ANGLAISEPatient MusansPas encore d'évaluation
- Brochure Enser FranceDocument23 pagesBrochure Enser FranceValenty Abou JaoudePas encore d'évaluation
- DOSSIER - Les 10 Pistes Pour Créer Un Climat de Confiance Avec Ses CollaborateursDocument2 pagesDOSSIER - Les 10 Pistes Pour Créer Un Climat de Confiance Avec Ses CollaborateursLin EduPas encore d'évaluation
- E BookDocument13 pagesE BookBOUSSEN RIMPas encore d'évaluation
- VDocument7 pagesVعثمان البريشيPas encore d'évaluation
- Annexe TP4Document2 pagesAnnexe TP4Zied GandouziPas encore d'évaluation
- Liliane PHANZU A Quoi Sert Le Contrôle de GestionDocument5 pagesLiliane PHANZU A Quoi Sert Le Contrôle de GestionLiliane Lina PhanzuPas encore d'évaluation
- 05 Spectrometrie de Masse PDFDocument7 pages05 Spectrometrie de Masse PDFSalma OugriPas encore d'évaluation
- Ben Mostefa Daho WailDocument13 pagesBen Mostefa Daho Wailfaroukhan0808Pas encore d'évaluation
- Analyse Financière Et ComptabilitéDocument14 pagesAnalyse Financière Et ComptabilitéGhofrane ZaouiPas encore d'évaluation
- Les Structure MixtesDocument29 pagesLes Structure Mixteshoudazereg57% (7)
- Exercices Avec Solutions Sur Le Processus StochastiquesDocument15 pagesExercices Avec Solutions Sur Le Processus Stochastiquessahnoune aliPas encore d'évaluation
- Disjoncteur Moteur Magnetothermique ENTDocument3 pagesDisjoncteur Moteur Magnetothermique ENTMame ware DiagnePas encore d'évaluation
- Entrainement ECE SVTDocument7 pagesEntrainement ECE SVTtiktokPas encore d'évaluation
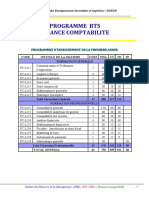
- Programme BTSDocument3 pagesProgramme BTSIssa KABOREPas encore d'évaluation
- Fiche de Progression Tle CD 2022-2023Document1 pageFiche de Progression Tle CD 2022-2023Romuald BongoPas encore d'évaluation
- DS1-COR-Lavage PrepayeDocument4 pagesDS1-COR-Lavage PrepayeMouad MemniPas encore d'évaluation
- A. Présentation Et Histoire: 2010: Le Produit A ÉtéDocument3 pagesA. Présentation Et Histoire: 2010: Le Produit A ÉtéManal DirabiPas encore d'évaluation
- Chapitre IDocument6 pagesChapitre IHachani SafiaPas encore d'évaluation
- 2003elakremi Roussel045Document34 pages2003elakremi Roussel045Esther SimeuPas encore d'évaluation
- Cours - API Et Programmation L3 AutoDocument17 pagesCours - API Et Programmation L3 AutoimenenouvellePas encore d'évaluation
- Une Technique Experimentale Et Son Utilisation en Évaluation: L'AutoradiographieDocument38 pagesUne Technique Experimentale Et Son Utilisation en Évaluation: L'AutoradiographieNada NadaPas encore d'évaluation
- Info Niv1 Cours2 FRDocument6 pagesInfo Niv1 Cours2 FRDjamilaTalebPas encore d'évaluation
- Data Scientist Les Fondamentaux de La Data Science - OFDS - PLBDocument4 pagesData Scientist Les Fondamentaux de La Data Science - OFDS - PLBAzerPas encore d'évaluation