
Cours SI
Cours SI
Vous aimerez peut-être aussi
- 4 - Apprentissage SuperviséDocument83 pages4 - Apprentissage SuperviséHichamKhayriPas encore d'évaluation
- Feuille 6 Calcul MatricielDocument9 pagesFeuille 6 Calcul MatricielAbdias PierrePas encore d'évaluation
- RDPDocument81 pagesRDPKarim ElyazamiPas encore d'évaluation
- Examen Blanc - Maintenance 2023Document4 pagesExamen Blanc - Maintenance 2023Abi ClémentPas encore d'évaluation
- TP APIsDocument4 pagesTP APIsbenfatahPas encore d'évaluation
- (IF122) Introduction La Programmation en C - Corrig - 2011Document2 pages(IF122) Introduction La Programmation en C - Corrig - 2011Med HaddadiPas encore d'évaluation
- Corrigé Commande Optimale Master 1 Automatique 2020Document3 pagesCorrigé Commande Optimale Master 1 Automatique 2020Nadir BouhaddaPas encore d'évaluation
- Résumé Du Chapitre 3Document5 pagesRésumé Du Chapitre 3MD HM BCPas encore d'évaluation
- Modelisation D'Un Systeme Hydraulique: Exercice 1Document2 pagesModelisation D'Un Systeme Hydraulique: Exercice 1Julian100% (1)
- Gestion de Production Cycle Ingenieur Génie IndustrielDocument317 pagesGestion de Production Cycle Ingenieur Génie IndustrielAnas OuallaPas encore d'évaluation
- GrafcetDocument16 pagesGrafcethamdi jihenPas encore d'évaluation
- TP 2017 2018Document12 pagesTP 2017 2018Douja BenPas encore d'évaluation
- Mini Projet Recherche Operationnelle Programmation Dans CDocument10 pagesMini Projet Recherche Operationnelle Programmation Dans CBitote ADPas encore d'évaluation
- Chap 03 ExercicesDocument35 pagesChap 03 ExercicesmechkourPas encore d'évaluation
- 2021 2022 Pcsi ReponsetemporelleDocument20 pages2021 2022 Pcsi ReponsetemporelleAmal FatouhPas encore d'évaluation
- CoursAssembleur - Chap1 Et 2Document28 pagesCoursAssembleur - Chap1 Et 2Achraf ElkhodariPas encore d'évaluation
- Cours CADocument97 pagesCours CAANASS ELYAAKOUBYPas encore d'évaluation
- Transf LaplaceDocument29 pagesTransf Laplacemrgabriel306Pas encore d'évaluation
- TD 2 PDFDocument4 pagesTD 2 PDFSaihi OussemaPas encore d'évaluation
- StatistiquesDocument71 pagesStatistiquesAyoub NaimiPas encore d'évaluation
- Chap 4 BeamDocument33 pagesChap 4 BeamSe Communiquer En FrançaisPas encore d'évaluation
- Résumé Labview1Document6 pagesRésumé Labview1FyggPas encore d'évaluation
- Correction TD Fiabilite 2Document12 pagesCorrection TD Fiabilite 2Said Djaballah100% (1)
- Auro1a2 TDDocument2 pagesAuro1a2 TDZu YadPas encore d'évaluation
- ChapitreII Analyse de DéfaillancesDocument9 pagesChapitreII Analyse de DéfaillancesRabeh BenzadaPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- Calibrage Géométrique D'une Caméra Ou D'un Capteur de Vision StéréoscopiqueDocument32 pagesCalibrage Géométrique D'une Caméra Ou D'un Capteur de Vision StéréoscopiqueAymen KeChiouchPas encore d'évaluation
- Automatique TP N°1Document16 pagesAutomatique TP N°1KHALIL MRIZIKPas encore d'évaluation
- TD N°4Document7 pagesTD N°4Maha BadriPas encore d'évaluation
- Temporisation Logicielle 68HC11 PDFDocument2 pagesTemporisation Logicielle 68HC11 PDFTOUFIQPas encore d'évaluation
- Travaux Pratiques: TP1: Identification Des Systèmes Par Les Méthodes GraphiquesDocument10 pagesTravaux Pratiques: TP1: Identification Des Systèmes Par Les Méthodes GraphiquesFahd OthmanPas encore d'évaluation
- Devoir Corrigé de Contrôle N°1 - Math Produit Scalaire & Généralité Sur Les Fonction & Continuité - 3ème Sciences Exp (2010-2011) MR Hafsi SalemDocument3 pagesDevoir Corrigé de Contrôle N°1 - Math Produit Scalaire & Généralité Sur Les Fonction & Continuité - 3ème Sciences Exp (2010-2011) MR Hafsi SalemdhouhaPas encore d'évaluation
- DualiteDocument21 pagesDualiteJihan KhoderPas encore d'évaluation
- Polycopie de Logique PDFDocument27 pagesPolycopie de Logique PDFDebilyano CrewPas encore d'évaluation
- TD1 CorrectionDocument18 pagesTD1 CorrectionManal QuorsanePas encore d'évaluation
- AAC - Examen Final PDFDocument1 pageAAC - Examen Final PDFMed AdamPas encore d'évaluation
- SynchronisationDocument21 pagesSynchronisationChaima ZeroualPas encore d'évaluation
- Chap2 AFDocument75 pagesChap2 AFOumayma AziziiPas encore d'évaluation
- Mise en Oeuvre GrafcetDocument12 pagesMise en Oeuvre GrafcetMohammed Amine KenedPas encore d'évaluation
- Chapitre 6Document7 pagesChapitre 6Mahrez Derdoum100% (1)
- 01 - Logique CombinatoireDocument34 pages01 - Logique CombinatoireouissemPas encore d'évaluation
- Ch4 PIDDocument49 pagesCh4 PIDmounaPas encore d'évaluation
- 03 - TD3Document6 pages03 - TD3Elghaza FatimaPas encore d'évaluation
- Cours TRDocument83 pagesCours TRtayariPas encore d'évaluation
- Etude Temporel Des SystèmesDocument10 pagesEtude Temporel Des Systèmesdonald youngouaPas encore d'évaluation
- Support TP - Technologie Des Chaines de ProductionDocument8 pagesSupport TP - Technologie Des Chaines de ProductionFrançoise NicolasPas encore d'évaluation
- TP1 - Etude Et Programmation Des Systèmes Continus - 2GMDocument7 pagesTP1 - Etude Et Programmation Des Systèmes Continus - 2GMahaweni004Pas encore d'évaluation
- Devoir Asservissement-1Document1 pageDevoir Asservissement-1Simo LabibPas encore d'évaluation
- UntitledDocument2 pagesUntitledcredoPas encore d'évaluation
- Diapo6 + TD2 SuiteDocument21 pagesDiapo6 + TD2 SuiteYOUSSEF ELBAAOUIPas encore d'évaluation
- Table Des Transformées de LaplaceDocument12 pagesTable Des Transformées de LaplacehassenbbPas encore d'évaluation
- Support Cours AABD M1 ISIA IL DENNOUNI 27 01 2019Document87 pagesSupport Cours AABD M1 ISIA IL DENNOUNI 27 01 2019AdrianaPas encore d'évaluation
- Res Analyse Fonctionnelle-Mp3Document6 pagesRes Analyse Fonctionnelle-Mp3YDDE SSABPas encore d'évaluation
- TD 77777777Document4 pagesTD 77777777Oussama Ouafik100% (1)
- Toutes Les Notes Hcia Ai Huawei Examen Simulé ÉcritDocument31 pagesToutes Les Notes Hcia Ai Huawei Examen Simulé ÉcritScribdTranslationsPas encore d'évaluation
- Descriptif Filiere InformatiqueDocument8 pagesDescriptif Filiere InformatiqueAnas ChPas encore d'évaluation
- Chapitre 6Document8 pagesChapitre 6mewguv Ahmed salekPas encore d'évaluation
- Chap4 - SLCI Modelisation Et DynamiqueDocument10 pagesChap4 - SLCI Modelisation Et DynamiqueRamzi MansouriPas encore d'évaluation
- Mpsi c2 Chap3 Fonction de TransfertDocument8 pagesMpsi c2 Chap3 Fonction de TransfertkamalPas encore d'évaluation
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- ENSIBSDocument13 pagesENSIBSBalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- Plaquette CCINPDocument8 pagesPlaquette CCINPBalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (8)
- Cours 04Document10 pagesCours 04BalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- 16 Poster Int paraDocument1 page16 Poster Int paraBalalaŇaŖîfPas encore d'évaluation
- Amplificateur Classe ADocument11 pagesAmplificateur Classe AHiba RosaPas encore d'évaluation
- Rapport de Stage ESTS ANAS EL BASSBASIDocument35 pagesRapport de Stage ESTS ANAS EL BASSBASISalma BelbsirPas encore d'évaluation
- Netsure Systemes Denergie DC 400v Fr361braDocument16 pagesNetsure Systemes Denergie DC 400v Fr361braKhaleb MindhirouPas encore d'évaluation
- 1 BI IntroductionDocument17 pages1 BI IntroductionImene AssousPas encore d'évaluation
- Notice de Montage Gse GroundsystemDocument20 pagesNotice de Montage Gse GroundsystemcoluusiPas encore d'évaluation
- Activité 3 ADN TPDocument2 pagesActivité 3 ADN TPefnt2023Pas encore d'évaluation
- Module 5Document16 pagesModule 5FerdianadPas encore d'évaluation
- Expose Sur OptimaintDocument6 pagesExpose Sur OptimaintBiba DieyePas encore d'évaluation
- Sys Expl II TD 3Document4 pagesSys Expl II TD 3Mohamed BaammiPas encore d'évaluation
- Partie 1 Cours ExcelDocument9 pagesPartie 1 Cours Exceldarni japhet MBADINGA MOMBOPas encore d'évaluation
- A21 Nombres Premiers - CoursDocument4 pagesA21 Nombres Premiers - Coursanh thu TranPas encore d'évaluation
- Ja Delmas Service Catalogue Services FRDocument28 pagesJa Delmas Service Catalogue Services FRabdoulkhaled35Pas encore d'évaluation
- TIA - Chap03 - Réseaux Neuro-FlousDocument6 pagesTIA - Chap03 - Réseaux Neuro-FlousNassr eddine100% (1)
- Book PFE 2021Document23 pagesBook PFE 2021kouki samarPas encore d'évaluation
- Programmation GPU-IRIIADocument51 pagesProgrammation GPU-IRIIASweat SweatPas encore d'évaluation
- Catalogue 2023 CCM EmballageDocument84 pagesCatalogue 2023 CCM EmballagetarikbenmoumenPas encore d'évaluation
- Recapitulatif Des GarantiesDocument4 pagesRecapitulatif Des GarantiesWayzzOnTop ftnPas encore d'évaluation
- Lab 3Document3 pagesLab 3Ouijdane RhmiraPas encore d'évaluation
- PISO Loops Description in OpenFOAMDocument7 pagesPISO Loops Description in OpenFOAMcypiii0% (1)
- gestion-de-stock-GSM - CopieDocument135 pagesgestion-de-stock-GSM - CopieFosseni DialloPas encore d'évaluation
- Sciences Et Technologies de Lindustrie eDocument5 pagesSciences Et Technologies de Lindustrie eDan CheridanPas encore d'évaluation
- BD2 TD3 PDFDocument1 pageBD2 TD3 PDFDionguePas encore d'évaluation
- Fiche Technique BisolDocument2 pagesFiche Technique BisolAyoubPas encore d'évaluation
- EPITA BrochureDocument96 pagesEPITA BrochurevenanceharoldPas encore d'évaluation
- Système de Freinage 02Document43 pagesSystème de Freinage 0218 ChbabiPas encore d'évaluation
- Dell Precision T3500 Brochure 1 FR PDFDocument2 pagesDell Precision T3500 Brochure 1 FR PDFYoucef BensenouciPas encore d'évaluation
- Cours Algo IN1-1Document15 pagesCours Algo IN1-1gladys cheuffaPas encore d'évaluation
- CoursDocument19 pagesCoursfouad akroudPas encore d'évaluation
- Datasheet Disjoncteurs Hager - CCDocument40 pagesDatasheet Disjoncteurs Hager - CCWiam AyrirPas encore d'évaluation
- Clarification Des Obligations Dans Une PrièreDocument18 pagesClarification Des Obligations Dans Une PrièreWaly DIAKHATEPas encore d'évaluation











































































































Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
Fonction de Transfert de Systèmes Complexes
Exemple de Système Complexe
Sommaire SEGWAY
1 - Place de la Fonction Transfert dans la Démarche
d’Etude des SLCI
2 - Rappel Cours 04 - Définition de la Fonction de Transfert
3 - Opérations Elémentaires sur les Schémas-Blocs
4 - Représentation Générique d’une Boucle Fermée
5 - Fonction de Transfert Boucle Fermée (FTBF)
6 - Fonction de Transfert Boucle Ouverte (FTBO)
7 - Retour Unitaire
8 - Manipulation des Schémas-Blocs
9 - Algèbre des Schémas-Blocs
10 - Fonction de Transfert Boucle Fermée des Systèmes
Multi-Variables
11 - Application : Calcul de la Fonction de Transfert du
Segway
1 - PLACE DE LA FONCTION TRANSFERT DANS LA DEMARCHE D’ETUDE DES SLCI
(1)
démarche
présentée dans le
Reprenons la démarche d’étude des systèmes asservis(1) et appliquons-la sur l’exemple du
chapitre 6 du cours Segway. On se fixe comme objectif d’étude d’établir un modèle de calcul du Segway pour
03 - Introduction à vérifier des performances vis-à-vis du cahier des charges fonctionnel.
l’automatique.
Domaine Physique (réel)
On modélise les entrées du
système ainsi que le système lui Comportement réel du système
(2)
même. Pour cela on exploite les
Rappel : Les
modèles de connaissance exis-
modèles de
connaissance tants et on construit, si besoin,
proviennent des modèles de comportement Objectif d’étude
d'équations (2)
. Modélisation
correspondant aux Ces différents modèles permet- des entrées et Domaine de simulation Validation
lois fondamentales
issues de la physique.
tent d'obtenir au final une du système
Les modèles de équation différentielle comple-
Comportement simulé du système
comportement xe et un schéma-bloc fonction-
correspondent à des nel. Modèles de Modèle de calcul
lois purement connaissance et de Schéma-bloc +
mathématiques comportement Fonction de transfert
construites par Le modèle s'il est non linéaire
identification à partir doit être aussi ensuite linéarisé Schéma-bloc fonctionnel
de courbes obtenues autour d’un point de
par l'expérimentation. fonctionnement que l’on Passage dans le domaine de Laplace
Calcul de la fonction de transfert
choisit. + Linéarisation autour d’un point de
fonctionnement (si nécessaire)
(3)
C’est à partir de la transformation de l'équation différentielle du modèle en équation
obtenue après
polynomiale (3) que l’on obtient la fonction de transfert du SLCI. Elle permet de caractériser le
application de la
transformée de comportement intrinsèque du système qui permettra ensuite de répondre à l’objectif d’étude
Laplace (validation de performances). Pour déterminer la fonction de transfert d’un SLCI constitué de
plusieurs blocs suivant une structure complexe, deux solutions sont possibles :
La première solution est une méthode qui consiste à manipuler et combiner uniquement
les différentes équations des blocs du système. Cependant cette solution a pour défaut de
devenir rapidement trop calculatoire pour des systèmes complexes.
Florestan MATHURIN Page 1 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
La seconde solution est une méthode qui consiste à manipuler et simplifier partiellement
ou parfois complètement le schéma-bloc du SLCI. Cette méthode est plus efficace pour
des systèmes complexes mais en revanche les simplifications réalisées éloignent le modèle
de la réalité physique du système.
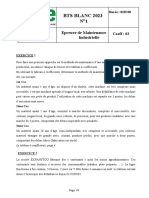
Exemple : Simplification complète du schéma-bloc du Segway pour α(p)=0 α(p)=0
ψc(p) ε(p) W(p) U(p)
p
- ψ(p)
+ C(p) + + M(p) H(p) +
- - -
UP(p) UV(p) G(p)
P(p)
Simplification du schéma-bloc pour α(p)=0
E(p) = ψc(p) S(p)= ψ(p)
F(p)
L’objectif de ce cours est de présenter les différents outils ainsi que les méthodes de travail à
utiliser pour calculer la fonction de transfert d'un système complexe.
2 - RAPPEL COURS 04 - DEFINITION DE LA FONCTION DE TRANSFERT
On appelle fonction de transfert H(p) d’un système la
S(p) E(p) S(p)
relation dans le domaine symbolique telle que H(p) . H(p)
E(p)
Elle caractérise le comportement intrinsèque du système et
ne dépend ni de l'entrée, ni de la sortie.
3 - OPERATIONS ELEMENTAIRES SUR LES SCHEMAS-BLOCS
3.1. Blocs en série
Dans le cas des blocs en série, on effectue le produit des fonctions de transfert de chaque
bloc :
E(p) S(p) E(p) S(p)
H1(p) H2(p) H3(p) H(p)
Simplification
H(p)= H1(p).H2(p).H3(p)
3.2. Blocs en parallèle
Dans le cas des blocs en parallèle, on utilise la relation du sommateur pour déduire
simplement l’expression de la fonction de transfert du système :
H1(p)
E(p) + S(p) E(p) S(p)
H(p)
+
Simplification
H2(p) H(p)= H1(p) + H2(p)
Florestan MATHURIN Page 2 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
4 - REPRESENTATION GENERIQUE D’UNE BOUCLE FERMEE
Chaîne directe
(4)
i.e. opérations Après manipulations sur le schéma-bloc du
E(p) ε(p) S(p)
élémentaires système complexe (4), on arrive toujours à + A(p)
précédentes un/des système(s) bouclé(s) dont la forme -
générique est la suivante :
M(p)
Cette forme générique de schéma-bloc est à B(p)
connaître, elle est appelée communément
boucle fermée. Chaîne de retour
On y retrouve :
ε(p) qui est l'écart entre M(p) de la chaine de retour et E(p) en entrée,
A(p) qui est la fonction de transfert en chaîne directe,
B(p) qui correspond à la fonction de transfert de la chaîne de retour,
M(p) qui est le produit entre la sortie S(p) et la fonction de transfert de la chaine de
retour.
5 - FONCTION DE TRANSFERT BOUCLE FERMEE (FTBF)
On définit la fonction de transfert en boucle fermée d’un système pour caractériser le
comportement global du système. Elle est déterminée sur la base du schéma boucle fermée
présenté précédemment.
S(p)
Par définition : H(p)
S(p)
E (p)
E(p) ε(p)
+ A(p) avec S(p) (p).A(p)
-
(5) (p) E(p) M(p) (5)
équation obtenue
en sortie du M(p)
et M(p) B(p).S(p)
sommateur B(p)
d’où : S(p) E(p) M(p).A(p)
Simplification S(p) E(p) B(p).S(p).A(p)
S(p).1 B(p).A(p) E(p).A(p)
E(p) A(p) S(p)
H(p) S(p) A(p)
1 A(p).B(p) Soit : H(p)
E(p) 1 A(p).B(p)
S(p) A(p)
H(p) est appelée fonction de transfert en boucle fermée (FTBF), elle
E(p) 1 A(p).B(p)
caractérise le comportement global du système boucle fermée.
Attention aux signes dans le comparateur !!!! Si le signe – de M(p) dans le comparateur est
S(p) A(p)
remplacé par un + la formule devient H(p) .
E(p) 1 A(p).B(p)
On utilise la FTBF pour étudier les réponses temporelles s(t) d’un système à des entrées e(t)
quelconques. Ces études permettent ensuite d'analyser les performances du système bouclé.
Florestan MATHURIN Page 3 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
6 - FONCTION DE TRANSFERT BOUCLE OUVERTE (FTBO)
La fonction de transfert en boucle ouverte T(p)
E(p) ε(p) S(p)
est définie comme la fonction de transfert du A(p)
+
système lorsque le retour sur le sommateur -
est coupé. Elle comprend la chaîne directe et
la chaîne de retour. Dans le cas de la FTBO, on M(p)
ne s'intéresse pas à la sortie S(p) mais à la B(p)
mesure M(p) en fonction ε(p). Coupure
Simplification
La FTBO correspond au produit de tous les
blocs de la boucle :
ε (p) M(p)
T(p)=A(p).B(p)
M(p)
T(p) A(p).B(p)
(p)
La FTBO est utilisée principalement pour déterminer les conditions de stabilité du système
boucle fermée (cours de PSI et MP).
Si la structure du schéma-bloc est complexe, on peut définir des FTBO et FTBF
intermédiaires pour tous les sous-systèmes à boucle fermée, mais seules la FTBF et la
FTBO de la boucle principale sont intéressantes.
Dans la pratique on calcule simplement la FTBF à partir de la FTBO grâces aux relations
suivantes :
FT de la chaine directe 1 FTBO
FTBF .
1 FTBO FT de la chaine de retour 1 FTBO
7 - RETOUR UNITAIRE
Un système asservi peut toujours être mis
E(p) ε(p) S(p)
sous la forme d’un système à retour unitaire A(p)
+
si l'entrée E(p) et la sortie S(p) sont -
comparables (même dimension).
L'avantage pratique d'un tel système est que la FTBF est calculée très facilement à partir de la
S(p) A(p) FTBO
FTBO : H(p) .
E(p) 1 A(p) 1 FTBO
8 - MANIPULATION DES SCHEMAS-BLOCS
La seule difficulté dans l'analyse d'un système asservi décrit par un schéma-bloc complexe, est
de réussir à obtenir les FTBO et FTBF du système pour étudier ses performances
L'idée générale de la méthode est de manipuler le schéma-bloc initial complexe pour faire
apparaître des sous-systèmes à boucle fermée pour lesquels la FTBF est évidemment simple à
calculer. Pour se ramener à des sous-systèmes à boucle fermée, on utilise le déplacement de
jonctions et de sommateurs. On pourra ensuite permuter deux sommateurs ou deux jonctions
de façon à faire apparaître des boucles fermées.
Florestan MATHURIN Page 4 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
8.1. Déplacements de jonctions en direction d'autres jonctions
L'objectif est de déplacer une jonction vers une autre jonction puis de les alterner ensuite (de
façon à faire disparaître une jonction gênante d'une boucle fermée).
U(p) W(p) U(p) W(p)
A(p) B(p) A(p) B(p)
Le déplacement peut se faire vers la gauche ou vers la droite mais il faut faire attention au
bloc rajouté dans la branche déplacée.
Déplacement du point de S(p)
Y(p) B(p)
prélèvement vers la gauche A(p)
X(p)
Schéma-bloc initial C(p).A(p)
Y(p) B(p) S(p)
A(p)
X(p) Y(p) S(p)
C(p) A(p) B(p)
Déplacement du point de
X(p)
prélèvement vers la droite C(p)/B(p)
(6)
de façon à faire 8.2. Déplacements de sommateurs en direction d'autres sommateurs
disparaître un L'objectif est, dans un premier temps, de déplacer un sommateur vers un autre sommateur
sommateur gênant en puis, dans un second temps, de les alterner (6).
plein milieu d'une
boucle fermée U(p) W(p) U(p) W(p)
+ + + +
- + + -
V(p) X(p) X(p) V(p)
Le déplacement peut se faire vers la gauche ou vers la droite et il faut faire attention au bloc
rajouté dans la branche déplacée.
Déplacement du sommateur Y(p) S(p)
vers la gauche + A(p) B(p)
-
Schéma-bloc initial
ε(p) S(p) X(p)
Y(p) B(p) C(p)/A(p)
A(p) +
-
X(p)
C(p)
Y(p) S(p)
A(p) B(p) +
-
Déplacement du sommateur
vers la droite X(p)
C(p).B(p)
Florestan MATHURIN Page 5 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
Il est inutile de déplacer un sommateur en direction d'une jonction ou l'inverse car aucune
simplification n'est possible.
Il faut toujours faire attention au(x) bloc(s) rajouté(s) dans la branche déplacée.
9 - ALGEBRE DES SCHEMAS-BLOCS
9.1. Système à boucles concentriques
E(p) S(p)
+ + A(p) C(p)
- -
B(p)
D(p)
Pour ce type de système, il faut toujours commencer par calculer la FTBF de la boucle interne.
E(p) A(p) S(p)
+ C(p)
- 1 A(p).B(p)
D(p)
On reconnait ensuite une boucle fermée que l’on sait bien traiter.
9.2. Système à boucles imbriquées
E(p)
E(p) S(p)
-
+ A(p) + B(p) D(p)
-
C(p)
Pour ce type de système, il faut toujours commencer par déplacer les points de prélèvement
pour se ramener à un système de boucles concentriques.
E(p) D(p)
E(p) S(p)
-
+ A(p) + B(p) D(p)
-
C(p)
On se retrouve ensuite devant un système à boucles concentriques que l’on sait aussi bien
gérer.
Florestan MATHURIN Page 6 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
10 - FONCTION DE TRANSFERT BOUCLE FERMEE DES SYSTEMES MULTI-VARIABLES
Dans un système réel, plusieurs entrées peuvent venir modifier la sortie. Ces entrées
(7)
Entrée consigne comprennent non seulement l'entrée principale (7) mais aussi des entrées supplémentaires
très souvent parasites (bruit, effort résistant...).
E2(p)
E1(p) - S(p)
+ A(p) + B(p)
-
C(p)
Pour déterminer la fonction de transfert sur ce type de système, on utilise le principe de
superposition des SLCI. On superpose deux modes : un 1er mode pour lequel l’entrée E2(p) est
considérée comme nulle et un 2nd mode lequel l’entrée E1(p) est considérée comme nulle.
Mode à entrée E2(p)=0 S(p)
H1 (p) E
2 (p )0 E1 (p) E
E1(p) 2 (p )0
S(p)
+ A(p) B(p)
- A(p).B(p)
H1 (p) E
2 (p)0 1 A(p).B(p).C(p)
C(p)
H1(p) est la fonction de transfert en
poursuite.
Mode à entrée E1(p)=0
E2(p)
- S(p) - E2(p) S(p)
+ A(p) + B(p) + B(p)
- -
C(p) A(p) C(p)
S(p) B(p)
H2 (p) E H2(p) est la fonction de transfert en régulation.
1 (p )0 E2 (p) E 1 A(p).B(p).C(p)
1 (p )0
La superposition des 2 modes permet d’obtenir au final la fonction de transfert boucle fermée
du système multi-variables :
A(p).B(p) B(p)
S(p) H1 (p) E .E1 (p) H2 (p) E .E2 (p) .E1 (p) .E2 (p)
2 (p )0 1 (p )0 1 A(p).B(p).C(p) 1 A(p).B(p).C(p)
Le dénominateur de la fonction de transfert en poursuite et de la fonction de transfert en
régulation est le même, c’est une caractéristique de la boucle. On peut montrer que la
stabilité du système (qui ne dépend que de la FTBO) ne dépend pas du nombre d'entrée
(cours de PSI ou MP).
Florestan MATHURIN Page 7 sur 8
Cours 05 - Fonction de Transfert de Systèmes Complexes Lycée Fermat Toulouse - CPGE MPSI/PCSI
11 - APPLICATION : CALCUL DE LA FONCTION DE TRANSFERT DU SEGWAY
Schéma-bloc initial du système α(p)
ε(p) W(p) U(p)
p
ψc(p) - ψ(p)
+ C(p) + + M(p) H(p) +
- - -
UP(p) UV(p) G(p)
P(p)
On constate que le schéma-bloc du système est complexe avec notamment deux variables
d’entrée (ψc(p) et α(p)) et plusieurs boucles imbriquées.
Calculer la fonction de transfert boucle fermée du système.
Solution :
α(p) 1
C(p).M(p).H(p)
E(p) = ψc(p) - S(p)= ψ(p)
+ F(p)
Simplification du
schéma-bloc
M(p).H(p)
1 M(p).H(p).G(p)
C(p).
M(p).H(p)
1 P(p).
1 M(p).H(p).G(p)
Avec F(p)
M(p).H(p)
1 M(p).H(p).G(p)
1 C(p).
M(p).H(p)
1 P(p).
1 M(p).H(p).G(p)
F(p)
Le principe de superposition permet au final d’écrire : (p) F(p). c (p) . (p)
C(p).M(p).H(p)
M(p).H(p).C(p)
avec F(p) .
1 M(p).H(p).C(p) M(p).H(p).G(p) M(p).H(p).P(p)
Florestan MATHURIN Page 8 sur 8
Vous aimerez peut-être aussi
- 4 - Apprentissage SuperviséDocument83 pages4 - Apprentissage SuperviséHichamKhayriPas encore d'évaluation
- Feuille 6 Calcul MatricielDocument9 pagesFeuille 6 Calcul MatricielAbdias PierrePas encore d'évaluation
- RDPDocument81 pagesRDPKarim ElyazamiPas encore d'évaluation
- Examen Blanc - Maintenance 2023Document4 pagesExamen Blanc - Maintenance 2023Abi ClémentPas encore d'évaluation
- TP APIsDocument4 pagesTP APIsbenfatahPas encore d'évaluation
- (IF122) Introduction La Programmation en C - Corrig - 2011Document2 pages(IF122) Introduction La Programmation en C - Corrig - 2011Med HaddadiPas encore d'évaluation
- Corrigé Commande Optimale Master 1 Automatique 2020Document3 pagesCorrigé Commande Optimale Master 1 Automatique 2020Nadir BouhaddaPas encore d'évaluation
- Résumé Du Chapitre 3Document5 pagesRésumé Du Chapitre 3MD HM BCPas encore d'évaluation
- Modelisation D'Un Systeme Hydraulique: Exercice 1Document2 pagesModelisation D'Un Systeme Hydraulique: Exercice 1Julian100% (1)
- Gestion de Production Cycle Ingenieur Génie IndustrielDocument317 pagesGestion de Production Cycle Ingenieur Génie IndustrielAnas OuallaPas encore d'évaluation
- GrafcetDocument16 pagesGrafcethamdi jihenPas encore d'évaluation
- TP 2017 2018Document12 pagesTP 2017 2018Douja BenPas encore d'évaluation
- Mini Projet Recherche Operationnelle Programmation Dans CDocument10 pagesMini Projet Recherche Operationnelle Programmation Dans CBitote ADPas encore d'évaluation
- Chap 03 ExercicesDocument35 pagesChap 03 ExercicesmechkourPas encore d'évaluation
- 2021 2022 Pcsi ReponsetemporelleDocument20 pages2021 2022 Pcsi ReponsetemporelleAmal FatouhPas encore d'évaluation
- CoursAssembleur - Chap1 Et 2Document28 pagesCoursAssembleur - Chap1 Et 2Achraf ElkhodariPas encore d'évaluation
- Cours CADocument97 pagesCours CAANASS ELYAAKOUBYPas encore d'évaluation
- Transf LaplaceDocument29 pagesTransf Laplacemrgabriel306Pas encore d'évaluation
- TD 2 PDFDocument4 pagesTD 2 PDFSaihi OussemaPas encore d'évaluation
- StatistiquesDocument71 pagesStatistiquesAyoub NaimiPas encore d'évaluation
- Chap 4 BeamDocument33 pagesChap 4 BeamSe Communiquer En FrançaisPas encore d'évaluation
- Résumé Labview1Document6 pagesRésumé Labview1FyggPas encore d'évaluation
- Correction TD Fiabilite 2Document12 pagesCorrection TD Fiabilite 2Said Djaballah100% (1)
- Auro1a2 TDDocument2 pagesAuro1a2 TDZu YadPas encore d'évaluation
- ChapitreII Analyse de DéfaillancesDocument9 pagesChapitreII Analyse de DéfaillancesRabeh BenzadaPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- Calibrage Géométrique D'une Caméra Ou D'un Capteur de Vision StéréoscopiqueDocument32 pagesCalibrage Géométrique D'une Caméra Ou D'un Capteur de Vision StéréoscopiqueAymen KeChiouchPas encore d'évaluation
- Automatique TP N°1Document16 pagesAutomatique TP N°1KHALIL MRIZIKPas encore d'évaluation
- TD N°4Document7 pagesTD N°4Maha BadriPas encore d'évaluation
- Temporisation Logicielle 68HC11 PDFDocument2 pagesTemporisation Logicielle 68HC11 PDFTOUFIQPas encore d'évaluation
- Travaux Pratiques: TP1: Identification Des Systèmes Par Les Méthodes GraphiquesDocument10 pagesTravaux Pratiques: TP1: Identification Des Systèmes Par Les Méthodes GraphiquesFahd OthmanPas encore d'évaluation
- Devoir Corrigé de Contrôle N°1 - Math Produit Scalaire & Généralité Sur Les Fonction & Continuité - 3ème Sciences Exp (2010-2011) MR Hafsi SalemDocument3 pagesDevoir Corrigé de Contrôle N°1 - Math Produit Scalaire & Généralité Sur Les Fonction & Continuité - 3ème Sciences Exp (2010-2011) MR Hafsi SalemdhouhaPas encore d'évaluation
- DualiteDocument21 pagesDualiteJihan KhoderPas encore d'évaluation
- Polycopie de Logique PDFDocument27 pagesPolycopie de Logique PDFDebilyano CrewPas encore d'évaluation
- TD1 CorrectionDocument18 pagesTD1 CorrectionManal QuorsanePas encore d'évaluation
- AAC - Examen Final PDFDocument1 pageAAC - Examen Final PDFMed AdamPas encore d'évaluation
- SynchronisationDocument21 pagesSynchronisationChaima ZeroualPas encore d'évaluation
- Chap2 AFDocument75 pagesChap2 AFOumayma AziziiPas encore d'évaluation
- Mise en Oeuvre GrafcetDocument12 pagesMise en Oeuvre GrafcetMohammed Amine KenedPas encore d'évaluation
- Chapitre 6Document7 pagesChapitre 6Mahrez Derdoum100% (1)
- 01 - Logique CombinatoireDocument34 pages01 - Logique CombinatoireouissemPas encore d'évaluation
- Ch4 PIDDocument49 pagesCh4 PIDmounaPas encore d'évaluation
- 03 - TD3Document6 pages03 - TD3Elghaza FatimaPas encore d'évaluation
- Cours TRDocument83 pagesCours TRtayariPas encore d'évaluation
- Etude Temporel Des SystèmesDocument10 pagesEtude Temporel Des Systèmesdonald youngouaPas encore d'évaluation
- Support TP - Technologie Des Chaines de ProductionDocument8 pagesSupport TP - Technologie Des Chaines de ProductionFrançoise NicolasPas encore d'évaluation
- TP1 - Etude Et Programmation Des Systèmes Continus - 2GMDocument7 pagesTP1 - Etude Et Programmation Des Systèmes Continus - 2GMahaweni004Pas encore d'évaluation
- Devoir Asservissement-1Document1 pageDevoir Asservissement-1Simo LabibPas encore d'évaluation
- UntitledDocument2 pagesUntitledcredoPas encore d'évaluation
- Diapo6 + TD2 SuiteDocument21 pagesDiapo6 + TD2 SuiteYOUSSEF ELBAAOUIPas encore d'évaluation
- Table Des Transformées de LaplaceDocument12 pagesTable Des Transformées de LaplacehassenbbPas encore d'évaluation
- Support Cours AABD M1 ISIA IL DENNOUNI 27 01 2019Document87 pagesSupport Cours AABD M1 ISIA IL DENNOUNI 27 01 2019AdrianaPas encore d'évaluation
- Res Analyse Fonctionnelle-Mp3Document6 pagesRes Analyse Fonctionnelle-Mp3YDDE SSABPas encore d'évaluation
- TD 77777777Document4 pagesTD 77777777Oussama Ouafik100% (1)
- Toutes Les Notes Hcia Ai Huawei Examen Simulé ÉcritDocument31 pagesToutes Les Notes Hcia Ai Huawei Examen Simulé ÉcritScribdTranslationsPas encore d'évaluation
- Descriptif Filiere InformatiqueDocument8 pagesDescriptif Filiere InformatiqueAnas ChPas encore d'évaluation
- Chapitre 6Document8 pagesChapitre 6mewguv Ahmed salekPas encore d'évaluation
- Chap4 - SLCI Modelisation Et DynamiqueDocument10 pagesChap4 - SLCI Modelisation Et DynamiqueRamzi MansouriPas encore d'évaluation
- Mpsi c2 Chap3 Fonction de TransfertDocument8 pagesMpsi c2 Chap3 Fonction de TransfertkamalPas encore d'évaluation
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- ENSIBSDocument13 pagesENSIBSBalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- Plaquette CCINPDocument8 pagesPlaquette CCINPBalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (8)
- Cours 04Document10 pagesCours 04BalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- 16 Poster Int paraDocument1 page16 Poster Int paraBalalaŇaŖîfPas encore d'évaluation
- Amplificateur Classe ADocument11 pagesAmplificateur Classe AHiba RosaPas encore d'évaluation
- Rapport de Stage ESTS ANAS EL BASSBASIDocument35 pagesRapport de Stage ESTS ANAS EL BASSBASISalma BelbsirPas encore d'évaluation
- Netsure Systemes Denergie DC 400v Fr361braDocument16 pagesNetsure Systemes Denergie DC 400v Fr361braKhaleb MindhirouPas encore d'évaluation
- 1 BI IntroductionDocument17 pages1 BI IntroductionImene AssousPas encore d'évaluation
- Notice de Montage Gse GroundsystemDocument20 pagesNotice de Montage Gse GroundsystemcoluusiPas encore d'évaluation
- Activité 3 ADN TPDocument2 pagesActivité 3 ADN TPefnt2023Pas encore d'évaluation
- Module 5Document16 pagesModule 5FerdianadPas encore d'évaluation
- Expose Sur OptimaintDocument6 pagesExpose Sur OptimaintBiba DieyePas encore d'évaluation
- Sys Expl II TD 3Document4 pagesSys Expl II TD 3Mohamed BaammiPas encore d'évaluation
- Partie 1 Cours ExcelDocument9 pagesPartie 1 Cours Exceldarni japhet MBADINGA MOMBOPas encore d'évaluation
- A21 Nombres Premiers - CoursDocument4 pagesA21 Nombres Premiers - Coursanh thu TranPas encore d'évaluation
- Ja Delmas Service Catalogue Services FRDocument28 pagesJa Delmas Service Catalogue Services FRabdoulkhaled35Pas encore d'évaluation
- TIA - Chap03 - Réseaux Neuro-FlousDocument6 pagesTIA - Chap03 - Réseaux Neuro-FlousNassr eddine100% (1)
- Book PFE 2021Document23 pagesBook PFE 2021kouki samarPas encore d'évaluation
- Programmation GPU-IRIIADocument51 pagesProgrammation GPU-IRIIASweat SweatPas encore d'évaluation
- Catalogue 2023 CCM EmballageDocument84 pagesCatalogue 2023 CCM EmballagetarikbenmoumenPas encore d'évaluation
- Recapitulatif Des GarantiesDocument4 pagesRecapitulatif Des GarantiesWayzzOnTop ftnPas encore d'évaluation
- Lab 3Document3 pagesLab 3Ouijdane RhmiraPas encore d'évaluation
- PISO Loops Description in OpenFOAMDocument7 pagesPISO Loops Description in OpenFOAMcypiii0% (1)
- gestion-de-stock-GSM - CopieDocument135 pagesgestion-de-stock-GSM - CopieFosseni DialloPas encore d'évaluation
- Sciences Et Technologies de Lindustrie eDocument5 pagesSciences Et Technologies de Lindustrie eDan CheridanPas encore d'évaluation
- BD2 TD3 PDFDocument1 pageBD2 TD3 PDFDionguePas encore d'évaluation
- Fiche Technique BisolDocument2 pagesFiche Technique BisolAyoubPas encore d'évaluation
- EPITA BrochureDocument96 pagesEPITA BrochurevenanceharoldPas encore d'évaluation
- Système de Freinage 02Document43 pagesSystème de Freinage 0218 ChbabiPas encore d'évaluation
- Dell Precision T3500 Brochure 1 FR PDFDocument2 pagesDell Precision T3500 Brochure 1 FR PDFYoucef BensenouciPas encore d'évaluation
- Cours Algo IN1-1Document15 pagesCours Algo IN1-1gladys cheuffaPas encore d'évaluation
- CoursDocument19 pagesCoursfouad akroudPas encore d'évaluation
- Datasheet Disjoncteurs Hager - CCDocument40 pagesDatasheet Disjoncteurs Hager - CCWiam AyrirPas encore d'évaluation
- Clarification Des Obligations Dans Une PrièreDocument18 pagesClarification Des Obligations Dans Une PrièreWaly DIAKHATEPas encore d'évaluation