Vous aimerez peut-être aussi
- Cours 7 Architecture Des 19e Et 20e Siècles-Converti-1 PDFDocument7 pagesCours 7 Architecture Des 19e Et 20e Siècles-Converti-1 PDFWind SentPas encore d'évaluation
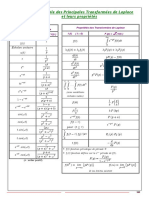
- Annexe B: Table Des Principales Transformées de Laplace Et Leurs PropriétésDocument1 pageAnnexe B: Table Des Principales Transformées de Laplace Et Leurs PropriétésAnonymous m1Dpyul100% (1)
- Premieres Missions - Campagne L5ADocument192 pagesPremieres Missions - Campagne L5Aokadus100% (1)
- Solution td1Document9 pagesSolution td1Khalil elkPas encore d'évaluation
- Chapitre 7 MMCDocument8 pagesChapitre 7 MMCSarah Med100% (1)
- Transformée de Laplace ResumeDocument3 pagesTransformée de Laplace ResumeMohamed TouzenePas encore d'évaluation
- 2 Fonction de Transfert Des Systemes IndustrielsDocument30 pages2 Fonction de Transfert Des Systemes IndustrielsMoh Abd BenPas encore d'évaluation
- Fiabilité Application ViergeDocument5 pagesFiabilité Application ViergeTom RenaultPas encore d'évaluation
- Td108lignes Fibres Optiques CorrigeDocument1 pageTd108lignes Fibres Optiques Corrigesevemasse100% (2)
- Compte Rendu TP 3 Info IndusDocument6 pagesCompte Rendu TP 3 Info IndusÌkràm Èl MarjanyPas encore d'évaluation
- TPautomatique TIMQ2018Document16 pagesTPautomatique TIMQ2018fatima azalmadPas encore d'évaluation
- LotosDocument20 pagesLotosSébastien RivalPas encore d'évaluation
- Résumé AsservissementDocument8 pagesRésumé AsservissementFahd KhaledPas encore d'évaluation
- Résumé Formulaire DynamiqueDocument2 pagesRésumé Formulaire DynamiqueZaineb AbbadPas encore d'évaluation
- 02 BANC de Jauges de DéformationsDocument28 pages02 BANC de Jauges de Déformationsyoussef sahelPas encore d'évaluation
- Exercices Corriges AsservissementDocument5 pagesExercices Corriges AsservissementMouna Ben SmidaPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- 151 Exercice Pi Avance Phase PDFDocument3 pages151 Exercice Pi Avance Phase PDFZakaria BdrPas encore d'évaluation
- 2021 2022 Pcsi ReponsetemporelleDocument20 pages2021 2022 Pcsi ReponsetemporelleAmal FatouhPas encore d'évaluation
- TD 6 (Ex Et Sol)Document9 pagesTD 6 (Ex Et Sol)anass sbniPas encore d'évaluation
- Suite Cours - Estimation - RtiDocument6 pagesSuite Cours - Estimation - Rtiyassin akkninnPas encore d'évaluation
- 33 AsservissementDocument23 pages33 AsservissementIssam BoujnanePas encore d'évaluation
- Examen Blanc - Maintenance 2023Document4 pagesExamen Blanc - Maintenance 2023Abi ClémentPas encore d'évaluation
- Analyse Des Systemes Lineaires Continus Dans Le Domaine TemporelDocument17 pagesAnalyse Des Systemes Lineaires Continus Dans Le Domaine TemporelBasma BENESSALIHPas encore d'évaluation
- Corrigé Ad2. O6 - Dimensionner en Effort L'actionneur D'un MécanismeDocument34 pagesCorrigé Ad2. O6 - Dimensionner en Effort L'actionneur D'un MécanismeEdward AdounvoPas encore d'évaluation
- TD CNSDocument3 pagesTD CNSHim Ibrah100% (1)
- Td1.systemes Asservis 2022-2023 PDFDocument1 pageTd1.systemes Asservis 2022-2023 PDFRaouf ZaouchPas encore d'évaluation
- Analyse 1 EpsilonDocument37 pagesAnalyse 1 EpsilonAbdallah SobohPas encore d'évaluation
- TD N°01 Regulation Industrielle S6Document1 pageTD N°01 Regulation Industrielle S6missouPas encore d'évaluation
- Travaux Pratiques: TP1: Identification Des Systèmes Par Les Méthodes GraphiquesDocument10 pagesTravaux Pratiques: TP1: Identification Des Systèmes Par Les Méthodes GraphiquesFahd OthmanPas encore d'évaluation
- Feuille 6 Calcul MatricielDocument9 pagesFeuille 6 Calcul MatricielAbdias PierrePas encore d'évaluation
- Examen S1 2015 2016Document4 pagesExamen S1 2015 2016Toufik SamPas encore d'évaluation
- Laplace InverseDocument2 pagesLaplace Inversehmdaoui anass100% (1)
- 12 FiabiliteDocument3 pages12 FiabiliteAhmed NadiPas encore d'évaluation
- td1 CorrDocument6 pagestd1 CorrOumeyma JouiniPas encore d'évaluation
- Correction TD MaintenanceDocument5 pagesCorrection TD MaintenanceMohamed OuladPas encore d'évaluation
- Modelisation D'Un Systeme Hydraulique: Exercice 1Document2 pagesModelisation D'Un Systeme Hydraulique: Exercice 1Julian100% (1)
- MASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Document33 pagesMASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Alex PittPas encore d'évaluation
- DS Signaux 1GE Iset Nabeul 2014Document2 pagesDS Signaux 1GE Iset Nabeul 2014Felix Chokwe Danra TaissalaPas encore d'évaluation
- TD 1 Asservissement & RégulationDocument1 pageTD 1 Asservissement & RégulationfkjfhjtPas encore d'évaluation
- TP1 - SLM - Initiation À Matlab Control ToolboxDocument2 pagesTP1 - SLM - Initiation À Matlab Control ToolboxNorhan AsiyePas encore d'évaluation
- Fichier Fascicule TPDocument16 pagesFichier Fascicule TPorg 2019Pas encore d'évaluation
- Controle 1Document1 pageControle 1adamPas encore d'évaluation
- TD 04 PDFDocument1 pageTD 04 PDFsarsauraPas encore d'évaluation
- 03 TD Ordonnancement-CorrDocument4 pages03 TD Ordonnancement-Corrعبدالرزاق أفرياضPas encore d'évaluation
- Correction Manuel D'activité 20-39Document20 pagesCorrection Manuel D'activité 20-39Oula F'zPas encore d'évaluation
- Traitement SignalDocument2 pagesTraitement SignalFaouzi TlemcenPas encore d'évaluation
- TD Prepa Ana 2elt2Document2 pagesTD Prepa Ana 2elt2Phenix PhenixPas encore d'évaluation
- La RécursivitéDocument3 pagesLa Récursivitéjbeliee jbeliPas encore d'évaluation
- Signaux Usuels PDFDocument35 pagesSignaux Usuels PDFHam DokPas encore d'évaluation
- 3 Cours TS PDFDocument38 pages3 Cours TS PDFKatie HattabPas encore d'évaluation
- Résumé Du Cours SuitesDocument3 pagesRésumé Du Cours SuitesAGOSSOU GatienPas encore d'évaluation
- TP Identification 2020Document2 pagesTP Identification 2020Amine BrahmiPas encore d'évaluation
- TP 2 Geno AcausalDocument18 pagesTP 2 Geno AcausalRachid BenjalouajaPas encore d'évaluation
- Critère de RouthDocument5 pagesCritère de RouthKhadija Raissi100% (1)
- Cours Transformation de FourierDocument6 pagesCours Transformation de Fourierinfo plusPas encore d'évaluation
- Examen Final Auto Iaa3Document5 pagesExamen Final Auto Iaa3Simon KoutouaPas encore d'évaluation
- TD4 AsservissementDocument2 pagesTD4 AsservissementELmokhtar Hamrouni0% (1)
- Chapitre 5 Systeme de Premier OrdreDocument9 pagesChapitre 5 Systeme de Premier OrdremoipopPas encore d'évaluation
- 10.-Corrige Colle10 Distance Applications Lineaires ContinuesDocument3 pages10.-Corrige Colle10 Distance Applications Lineaires ContinuesPeuitoPas encore d'évaluation
- Automatique-Échanti TD 0910Document18 pagesAutomatique-Échanti TD 0910EA BeatszPas encore d'évaluation
- QUA192-semaine 2 RSERRADocument58 pagesQUA192-semaine 2 RSERRABelalia100% (2)
- Fang Ntoumou A4 0Document4 pagesFang Ntoumou A4 0Gaëlle BaillyPas encore d'évaluation
- Cours de Maths FinancieresDocument32 pagesCours de Maths FinancieresHermann BiendouPas encore d'évaluation
- CAT Masse AbdominaleDocument2 pagesCAT Masse AbdominaleNassirou FaïssalPas encore d'évaluation
- Pleurésies PurulentesDocument9 pagesPleurésies PurulentesALEXPas encore d'évaluation
- Rapport OWASPDocument23 pagesRapport OWASPnour.barrani2019Pas encore d'évaluation
- Mini Projet ConstructionDocument102 pagesMini Projet ConstructionDjibril DiakitePas encore d'évaluation
- Les Bases de Donnees-Essono Zue Arnauld5Document155 pagesLes Bases de Donnees-Essono Zue Arnauld5Arnauld ESSONO ZUEPas encore d'évaluation
- Série 1 .Document7 pagesSérie 1 .Agnaou MohamedPas encore d'évaluation
- Catalogue 2013 / 2014 Maison LéonardDocument48 pagesCatalogue 2013 / 2014 Maison LéonardmaisonleonardPas encore d'évaluation
- Dossier Lrar VignalDocument13 pagesDossier Lrar VignalCyril DELACOURPas encore d'évaluation
- Plan DaffairesDocument32 pagesPlan DaffairesScribdTranslationsPas encore d'évaluation
- 1ère Dissertation 1 Dynamisme Démographique Et Qualité de La Vie (Corrigé)Document2 pages1ère Dissertation 1 Dynamisme Démographique Et Qualité de La Vie (Corrigé)ANE100% (3)
- 2019 - ch1 - Fiche - Method3 - Resolution - ExerciceDocument3 pages2019 - ch1 - Fiche - Method3 - Resolution - ExerciceLéo LescourretPas encore d'évaluation
- Appel Candidature DoctoratDocument1 pageAppel Candidature DoctoratAbdou KarimPas encore d'évaluation
- Microméga - Physique-Chimie Cycle 4 Page 312 314Document3 pagesMicroméga - Physique-Chimie Cycle 4 Page 312 314yaegumiPas encore d'évaluation
- Machines À Sous Et Jackpots ProgressifsDocument2 pagesMachines À Sous Et Jackpots ProgressifsRemy MithePas encore d'évaluation
- Parametrage COVADISDocument4 pagesParametrage COVADISimaPas encore d'évaluation
- Loussaut Elisabeth L As de CoeurDocument2 pagesLoussaut Elisabeth L As de CoeurWhizeArt 笨蛋Pas encore d'évaluation
- Ne Pas Diffuser: M EcaniqueDocument6 pagesNe Pas Diffuser: M Ecaniqueahmed aboulkacemPas encore d'évaluation
- TP de Base de Biologie PropreDocument6 pagesTP de Base de Biologie PropreKévin AshuzaPas encore d'évaluation
- MySQL DocumentDocument5 pagesMySQL DocumentRiquelmé CHARLESPas encore d'évaluation
- La Crise Des EMF Au Cameroun Analyse de Me Johann EBONGOMDocument8 pagesLa Crise Des EMF Au Cameroun Analyse de Me Johann EBONGOMSteve MbaPas encore d'évaluation
- 13-408 Reb303Document98 pages13-408 Reb303Felipe CamusPas encore d'évaluation
- TP de ThermocoupleDocument11 pagesTP de Thermocouplewaei100% (5)
- 6 Estimation Du Cout de ProductionDocument61 pages6 Estimation Du Cout de ProductionZalfeni Aymen0% (1)
- Liste Des Personnage Du ScenarioDocument4 pagesListe Des Personnage Du Scenarioputana grosPas encore d'évaluation