Vous aimerez peut-être aussi
- Serie7 - Dynamique Des Structures 2019 PDFDocument1 pageSerie7 - Dynamique Des Structures 2019 PDFManal NebhaniPas encore d'évaluation
- Diapos Description MR PDFDocument35 pagesDiapos Description MR PDFsalma.souissi100% (1)
- Dynamique Des Structures - Cours3 - 2019Document18 pagesDynamique Des Structures - Cours3 - 2019choaib AHIJIPas encore d'évaluation
- Essai MDS Master MSROE ReiffsteckDocument318 pagesEssai MDS Master MSROE ReiffsteckBENSAAOUDPas encore d'évaluation
- Chapitre1 - Rappel MMC - Version EtudiantDocument31 pagesChapitre1 - Rappel MMC - Version EtudiantIllya IchaouPas encore d'évaluation
- Dynamique Des Structures - Cours2 - 2019 PDFDocument26 pagesDynamique Des Structures - Cours2 - 2019 PDFSamagassi SouleymanePas encore d'évaluation
- Rattrapage Mecanique Des Sols 2019 2020Document2 pagesRattrapage Mecanique Des Sols 2019 2020somaya ehPas encore d'évaluation
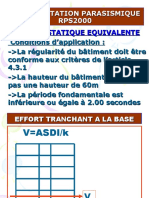
- Formation Rps2000 (Methode Statique Equivalente)Document63 pagesFormation Rps2000 (Methode Statique Equivalente)roma JamanPas encore d'évaluation
- CCV223-2009-Session 1 Avec CorrectionasafaDocument5 pagesCCV223-2009-Session 1 Avec CorrectionasafaTareck Bou JaoudePas encore d'évaluation
- CHEC - OM - Application N°3 - Etude de La Connexion - VDDocument12 pagesCHEC - OM - Application N°3 - Etude de La Connexion - VDMarioPas encore d'évaluation
- Projet de Beton PrecontraintDocument4 pagesProjet de Beton PrecontraintsaloniPas encore d'évaluation
- Ponts - Etude de Définition - 2 - 2 - MP2021Document34 pagesPonts - Etude de Définition - 2 - 2 - MP2021abdel aliPas encore d'évaluation
- Chapitre 3 - 1 Sur 3Document14 pagesChapitre 3 - 1 Sur 3Hamza MokhtariPas encore d'évaluation
- Projet RPSDocument13 pagesProjet RPSgc.ensam.2023Pas encore d'évaluation
- Travaux de Fondations ProfondesDocument43 pagesTravaux de Fondations ProfondeskikouramoPas encore d'évaluation
- CC RDM2 2020 2021Document1 pageCC RDM2 2020 2021Oumayma RkiouakPas encore d'évaluation
- FCBA - Comprendre Et Maitriser La Durabilite Du Bois Dans La Construction - 2020Document216 pagesFCBA - Comprendre Et Maitriser La Durabilite Du Bois Dans La Construction - 2020sautier_thomasPas encore d'évaluation
- Ouvragestypes 3-1 Picf Pipo PodDocument31 pagesOuvragestypes 3-1 Picf Pipo Podtest liliPas encore d'évaluation
- Tech Base Chap 1Document19 pagesTech Base Chap 1nora100% (1)
- Exam - Mat - de Construction II-session Normal - 17-18Document4 pagesExam - Mat - de Construction II-session Normal - 17-18SaidPas encore d'évaluation
- M1 Part2 DynamiqueDocument83 pagesM1 Part2 DynamiqueSaad BenchekrounPas encore d'évaluation
- Cal-Eco 0Document64 pagesCal-Eco 0FaiçalEssabery100% (1)
- CHAP 5 Etude Sismique PDFDocument17 pagesCHAP 5 Etude Sismique PDFSalah HadjiPas encore d'évaluation
- 6 BP Effort TranchantDocument40 pages6 BP Effort TranchantMohamed Elkinia100% (1)
- Geologie Chapitre5Document51 pagesGeologie Chapitre5Ghizlane IDPas encore d'évaluation
- TerrassmentDocument54 pagesTerrassmentmohamed abyaaPas encore d'évaluation
- BP Chap4Document10 pagesBP Chap4Yassine KARMATIPas encore d'évaluation
- Benmessaoud AhmedDocument81 pagesBenmessaoud AhmedZahra AbousaidPas encore d'évaluation
- Analyse Limite 2021Document40 pagesAnalyse Limite 2021Fisso Ben BenPas encore d'évaluation
- Genie Parasismique Presentation Intro Plus 2edDocument49 pagesGenie Parasismique Presentation Intro Plus 2edamira SadguiPas encore d'évaluation
- Généralités de Bâtimen100Document28 pagesGénéralités de Bâtimen100Oumaima Dela RosaPas encore d'évaluation
- Module Béton Précontraint 3Agc-Ipsas: Jihen Mallek JallouliDocument12 pagesModule Béton Précontraint 3Agc-Ipsas: Jihen Mallek JallouliRami ZekriPas encore d'évaluation
- Sismique - Chap 3Document50 pagesSismique - Chap 3Maroua LahbibPas encore d'évaluation
- Beton Arme BAEL 91Document44 pagesBeton Arme BAEL 91Valentin Ignace MangaPas encore d'évaluation
- BTP Pfe Elbaqia Imane 18Document123 pagesBTP Pfe Elbaqia Imane 18Hakimâ AbátàlebPas encore d'évaluation
- Emploi EMG (S1-2020) 2GC3Document1 pageEmploi EMG (S1-2020) 2GC3Bec RoudaynaPas encore d'évaluation
- 5°gc 2Document1 page5°gc 2meryem ezzouakPas encore d'évaluation
- TD BP-2GC3,4-2021Document2 pagesTD BP-2GC3,4-2021Abderrahman LahkaimiPas encore d'évaluation
- Exercice Type BTP 110Document1 pageExercice Type BTP 110kouakou jean sylvestre yaoPas encore d'évaluation
- TD1 Enpc Final CorrigeDocument15 pagesTD1 Enpc Final Corrigemalik belmokhtarPas encore d'évaluation
- Ecole - Post Tension - Feuille - P01 - PLAN de COFFRAGEDocument1 pageEcole - Post Tension - Feuille - P01 - PLAN de COFFRAGEosmanovic2020Pas encore d'évaluation
- Chapitre 2 - Constructions ParasismiquesDocument87 pagesChapitre 2 - Constructions ParasismiquesaminePas encore d'évaluation
- Examen 2019Document4 pagesExamen 2019Fisso Ben BenPas encore d'évaluation
- Béton PrécontraintDocument6 pagesBéton PrécontraintRoger DonjanPas encore d'évaluation
- Etude SismiqueDocument9 pagesEtude SismiquesousouPas encore d'évaluation
- MSD Cours1Document12 pagesMSD Cours1saad mouanisPas encore d'évaluation
- Afps Réglementation Parasismique FRDocument3 pagesAfps Réglementation Parasismique FRMars76100% (1)
- Stabilté Des PentesDocument49 pagesStabilté Des PentesOuassem100% (1)
- 472 Module4 - Sout - 2012 01 FP PDFDocument94 pages472 Module4 - Sout - 2012 01 FP PDFDidaDidoPas encore d'évaluation
- Liants Au Bitume CaoutchoucDocument30 pagesLiants Au Bitume Caoutchoucidrissi_toronPas encore d'évaluation
- 126-Resistance Au Cisaillement Des sols-DBranque PDFDocument30 pages126-Resistance Au Cisaillement Des sols-DBranque PDFWalid PhénixPas encore d'évaluation
- Corrige - Serie 8 - Dynamique Des Strucutres - 2020 - 2021Document3 pagesCorrige - Serie 8 - Dynamique Des Strucutres - 2020 - 2021romaPas encore d'évaluation
- Méthodologie Des Calculs SismiquesDocument19 pagesMéthodologie Des Calculs Sismiquesroma JamanPas encore d'évaluation
- Composition S1 Bep Ii GCC PDFDocument2 pagesComposition S1 Bep Ii GCC PDFPaul KoudougouPas encore d'évaluation
- M1 Part1 DynamiqueDocument112 pagesM1 Part1 DynamiqueSaad BenchekrounPas encore d'évaluation
- TD - Modélisation Élasto-PlasticitéDocument4 pagesTD - Modélisation Élasto-PlasticitéHamza MokhtariPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- Ecoulements Dans Les Reacteurs Distribution Des Temps de Sejour PDFDocument23 pagesEcoulements Dans Les Reacteurs Distribution Des Temps de Sejour PDFMedPas encore d'évaluation
- Examen Final - Corrigé - Phys04 - 2020-21 - ESSAT PDFDocument5 pagesExamen Final - Corrigé - Phys04 - 2020-21 - ESSAT PDFHou HouPas encore d'évaluation
- Formulaire Dynamique de StructuresDocument7 pagesFormulaire Dynamique de Structuresksecas_1Pas encore d'évaluation
- Maîtriser La Maintenance ComplèteDocument1 pageMaîtriser La Maintenance ComplèteallaouiPas encore d'évaluation
- Les Types D'articles ScientifiquesDocument1 pageLes Types D'articles ScientifiquesallaouiPas encore d'évaluation
- ADocument1 pageAallaouiPas encore d'évaluation
- Choisir Vos Préférences en Matière de CookiesDocument1 pageChoisir Vos Préférences en Matière de CookiesallaouiPas encore d'évaluation
- Un Texte Académique IrréprochableDocument1 pageUn Texte Académique IrréprochableallaouiPas encore d'évaluation
- Le Manuel de Réparation: Automobile en Français Mais Ce N'est Plus Le Cas Actuellement. Nous enDocument1 pageLe Manuel de Réparation: Automobile en Français Mais Ce N'est Plus Le Cas Actuellement. Nous enallaouiPas encore d'évaluation
- 1Document1 page1allaouiPas encore d'évaluation
- Cours ELASTICITE DEBIH PDFDocument30 pagesCours ELASTICITE DEBIH PDFallaouiPas encore d'évaluation
- Fiche de TD N 02Document4 pagesFiche de TD N 02allaouiPas encore d'évaluation
- M14-Connaissance de La Mecanique Appliquee BAEL BTP-TSCTDocument110 pagesM14-Connaissance de La Mecanique Appliquee BAEL BTP-TSCTMed Abderrahim75% (4)
- Norme NF 206 CN PDFDocument27 pagesNorme NF 206 CN PDFallaouiPas encore d'évaluation
- Vous Pouvez en Trouver en Torrent Ou en PDF Sur Internet Mais C'est Illégal. Elles Sont Protégées Par Les Droits D'auteursDocument1 pageVous Pouvez en Trouver en Torrent Ou en PDF Sur Internet Mais C'est Illégal. Elles Sont Protégées Par Les Droits D'auteursallaouiPas encore d'évaluation
- Prog DDS I L3 CMDocument2 pagesProg DDS I L3 CMallaouiPas encore d'évaluation
- Chapitre2. Les Règles Du B.ADocument15 pagesChapitre2. Les Règles Du B.AAméliePas encore d'évaluation
- TD - Flexion ComposéeDocument1 pageTD - Flexion ComposéeallaouiPas encore d'évaluation
- IntelliPlus CVCDocument4 pagesIntelliPlus CVCallaouiPas encore d'évaluation
- Medapoxy Sol HRCDocument2 pagesMedapoxy Sol HRCallaouiPas encore d'évaluation
- Medacryl TSDocument1 pageMedacryl TSallaouiPas encore d'évaluation
- Medapoxy STRDocument2 pagesMedapoxy STRallaoui0% (1)
- Etude CapacitaireDocument162 pagesEtude CapacitaireallaouiPas encore d'évaluation
- Bâtiment R+5 À Usage D'habitation Et ComercialDocument238 pagesBâtiment R+5 À Usage D'habitation Et ComercialallaouiPas encore d'évaluation
- Exercices de MMC PDFDocument83 pagesExercices de MMC PDFallaoui100% (2)
- Chapitre 01 S2 CMDocument3 pagesChapitre 01 S2 CMallaouiPas encore d'évaluation
- CV Allaoui PDFDocument4 pagesCV Allaoui PDFallaouiPas encore d'évaluation
- Exemples D Actions Mecaniques Cours 2Document4 pagesExemples D Actions Mecaniques Cours 2Šä ŁmäPas encore d'évaluation
- ProjetDocument40 pagesProjetIhssane BouayadPas encore d'évaluation
- PCM FS8 EnergieDocument3 pagesPCM FS8 EnergieAmina DinariPas encore d'évaluation
- Chap2 (La Conversion Électromagnétique)Document26 pagesChap2 (La Conversion Électromagnétique)speratePas encore d'évaluation
- Chapitre III Applications Des DiodesDocument9 pagesChapitre III Applications Des DiodesSiwar Abbes100% (2)
- Exercices Loi de CoulombDocument2 pagesExercices Loi de CoulombIsac Polat60% (5)
- Présentation "Sciences Oubliées" - LES ÉNERGIES LIBRES (Aperçu Du Menu Et Première Approche)Document39 pagesPrésentation "Sciences Oubliées" - LES ÉNERGIES LIBRES (Aperçu Du Menu Et Première Approche)LudovicPas encore d'évaluation
- Échangeur de ChaleurDocument12 pagesÉchangeur de ChaleurBertin KamsipaPas encore d'évaluation
- Altimètre de 0 À 2000 MDocument9 pagesAltimètre de 0 À 2000 Mapi-3722384100% (3)
- Cycle INGENIEUR - PhysiqueDocument2 pagesCycle INGENIEUR - PhysiqueViridiane MaguepoPas encore d'évaluation
- Machines Thermique Cours g3 ElcDocument87 pagesMachines Thermique Cours g3 ElcChris WassasyaPas encore d'évaluation
- TP VOM 2Document4 pagesTP VOM 2Sid ahmed rabiaPas encore d'évaluation
- Ups LGR 0158 FRDocument2 pagesUps LGR 0158 FRyoussefr1953Pas encore d'évaluation
- TD A11 06 Puissance Energie CorrigeDocument3 pagesTD A11 06 Puissance Energie CorrigePhilippeTavernierPas encore d'évaluation
- Machine AsynchroneDocument16 pagesMachine AsynchroneEr-Rhahmani MedPas encore d'évaluation
- Chap 1-ACME - BFDocument147 pagesChap 1-ACME - BFÐoudī BelkPas encore d'évaluation
- Allali Nicolas DLEDocument183 pagesAllali Nicolas DLEMa NarPas encore d'évaluation
- TD4 2007Document6 pagesTD4 2007Hassan ChehouaniPas encore d'évaluation
- DYNAMIQUE Corrigé de L'exercice L Ensemble (Homme + Moto) Page Suivante A Une Masse Totale M 340 Kg. Pour Tout Le Problème, On PrendraDocument6 pagesDYNAMIQUE Corrigé de L'exercice L Ensemble (Homme + Moto) Page Suivante A Une Masse Totale M 340 Kg. Pour Tout Le Problème, On PrendraAimé MakPas encore d'évaluation
- Corrigé Série 2 Partie 2Document2 pagesCorrigé Série 2 Partie 2fad hmaPas encore d'évaluation
- Page FacebookDocument3 pagesPage FacebookDjm AlgPas encore d'évaluation
- Installateur Equipement Foyer: Conseil en DU Option ElectroménagerDocument10 pagesInstallateur Equipement Foyer: Conseil en DU Option ElectroménagerfabPas encore d'évaluation
- Convertisseurs StatiquesDocument4 pagesConvertisseurs StatiquesSykdom Smashes50% (2)
- Redresseur Serie 880 240v 10a 48vDocument2 pagesRedresseur Serie 880 240v 10a 48vsoltani aliPas encore d'évaluation
- Directives D'utilisation: Manuel D'installation Et D'opérationDocument100 pagesDirectives D'utilisation: Manuel D'installation Et D'opérationMohamed SaadPas encore d'évaluation
- 04.gas - 3 4 5 6 7 - 2 - 2915916 7Document52 pages04.gas - 3 4 5 6 7 - 2 - 2915916 7arkawirawan metodiusPas encore d'évaluation
- FactureDocument10 pagesFacturedropstore2222Pas encore d'évaluation
- TP3 Moteur Courant Continu HacheurDocument7 pagesTP3 Moteur Courant Continu HacheurYou CefPas encore d'évaluation
- Corrigé Synthése ESA 2022 (TEST3)Document10 pagesCorrigé Synthése ESA 2022 (TEST3)otmane touilPas encore d'évaluation
- Mecanique de PointDocument261 pagesMecanique de PointBen FahPas encore d'évaluation