Vous aimerez peut-être aussi
- 05 - Cayley Hamilton - Décomposition de DunfordDocument3 pages05 - Cayley Hamilton - Décomposition de DunfordLouai AlouiPas encore d'évaluation
- MyPrepa PolynomesDocument20 pagesMyPrepa PolynomesElfeur NGOLOPas encore d'évaluation
- Révision 2 - KPMDocument4 pagesRévision 2 - KPMFarid RanamPas encore d'évaluation
- TD 2 Reduction Des EndomorphismesDocument4 pagesTD 2 Reduction Des EndomorphismesHana Hossni100% (1)
- Page 1 Sur 7: Pierre Bron - SP e TSI - Lyc Ee Chaptal - 22000 ST BrieucDocument7 pagesPage 1 Sur 7: Pierre Bron - SP e TSI - Lyc Ee Chaptal - 22000 ST Brieucapi-3762501Pas encore d'évaluation
- Sujet1 Maths 2 CCP MP 2012Document4 pagesSujet1 Maths 2 CCP MP 2012بدر أو صافيPas encore d'évaluation
- dm18 Mpsi Determinants - CirculantsDocument6 pagesdm18 Mpsi Determinants - Circulantsyoussef nigloryaPas encore d'évaluation
- 87 Af 79Document3 pages87 Af 79MoustakimPas encore d'évaluation
- Poly 2Document3 pagesPoly 2robin barracouPas encore d'évaluation
- ECS2 TD6 CorrectionDocument17 pagesECS2 TD6 CorrectionMoustakimPas encore d'évaluation
- Problème 1Document6 pagesProblème 1Ibtissam frPas encore d'évaluation
- Poly MinimalDocument5 pagesPoly Minimalsaida aliouaPas encore d'évaluation
- Concours Centrale-Supélec 2021: Mathématiques 2 MPDocument4 pagesConcours Centrale-Supélec 2021: Mathématiques 2 MPabdel dalilPas encore d'évaluation
- DistribDocument9 pagesDistribAyoub BelachmiPas encore d'évaluation
- ECRICO04Document15 pagesECRICO04ABRAHAM NENE100% (1)
- Exo PolynomesDocument7 pagesExo Polynomesmehdi fahmiPas encore d'évaluation
- Poly-Endo 23-24, S3Document11 pagesPoly-Endo 23-24, S3derroufatima01Pas encore d'évaluation
- Ecg2 TD6Document6 pagesEcg2 TD6motivation31102001Pas encore d'évaluation
- Décomposition de Dunford Et Reduction de JordanDocument22 pagesDécomposition de Dunford Et Reduction de JordanMouna DahbiPas encore d'évaluation
- TSI1 MathsDocument8 pagesTSI1 MathsDupuyPas encore d'évaluation
- Algebre1 TD11 CorrigeDocument22 pagesAlgebre1 TD11 CorrigeSamba DiengPas encore d'évaluation
- DS5 Polynome (Fermat)Document3 pagesDS5 Polynome (Fermat)Anis ChaibiPas encore d'évaluation
- Matrices CorrDocument3 pagesMatrices CorrSarah BhmiPas encore d'évaluation
- Centrale 2019 PSI M2 CorrigeDocument9 pagesCentrale 2019 PSI M2 CorrigeLéopold CossonPas encore d'évaluation
- Colle Reduction Des EndomorphismesDocument3 pagesColle Reduction Des EndomorphismesSalim ErrabiiPas encore d'évaluation
- TD 26Document4 pagesTD 26Away LeePas encore d'évaluation
- Reduction D Endomorphismes Corrige Niveau 2Document13 pagesReduction D Endomorphismes Corrige Niveau 2Kenneth KodjoPas encore d'évaluation
- Centrale Supelec MP 2012 Maths 2 EpreuveDocument4 pagesCentrale Supelec MP 2012 Maths 2 EpreuveMiguel Clovis KamPas encore d'évaluation
- pc4 CorrigeDocument2 pagespc4 CorrigeMeriam KooliPas encore d'évaluation
- Capes 2009 M2 EnonceDocument7 pagesCapes 2009 M2 EnonceYassinePas encore d'évaluation
- ExamenDocument3 pagesExamenToledanoPas encore d'évaluation
- Cayley HamiltonDocument2 pagesCayley Hamiltonabderrahim ouberriPas encore d'évaluation
- Oraux ENS MathsDocument18 pagesOraux ENS MathsBaptiste ARNAUDOPas encore d'évaluation
- CorrigéAvec BR - Examen - Proba - SMC4 - 2016Document3 pagesCorrigéAvec BR - Examen - Proba - SMC4 - 2016dodoPas encore d'évaluation
- Cours ALG3Document19 pagesCours ALG3Aymane ElouadiPas encore d'évaluation
- Banque X-ÉNS 2016 MP Mathématiques C EaDocument5 pagesBanque X-ÉNS 2016 MP Mathématiques C EaMehdi BnmssdPas encore d'évaluation
- Chap4 Red TD EtudDocument11 pagesChap4 Red TD Etud96695vhx6qPas encore d'évaluation
- Télécharger Examen Avec Corrigé N°0 de Module ALGEBRE 4 (Réduction Des Endomorphismes Et Applications) SMIA S3 PDF-1Document4 pagesTélécharger Examen Avec Corrigé N°0 de Module ALGEBRE 4 (Réduction Des Endomorphismes Et Applications) SMIA S3 PDF-1ratamanegre77Pas encore d'évaluation
- TD Reduction Math PsiDocument3 pagesTD Reduction Math Psititoji5815Pas encore d'évaluation
- Interpolation LagrangeDocument4 pagesInterpolation LagrangeAbdelouadoud SameryPas encore d'évaluation
- DS N°05 - Concours BlancDocument9 pagesDS N°05 - Concours BlancEdward AdounvoPas encore d'évaluation
- Math TerminalesDocument6 pagesMath TerminalesNDEYE FATOU CISSE NIASSEPas encore d'évaluation
- Roblème Endomorphisme de Différences Finies Polynômes Factoriels Et Polynômes de ErnoulliDocument5 pagesRoblème Endomorphisme de Différences Finies Polynômes Factoriels Et Polynômes de ErnoulliMBADJOUN DanielPas encore d'évaluation
- Problème Sur Topologie MatricielleDocument4 pagesProblème Sur Topologie MatricielleabrahamPas encore d'évaluation
- Oraux X - ENS - Centrale - Mines MathsDocument17 pagesOraux X - ENS - Centrale - Mines MathsBaptiste ARNAUDOPas encore d'évaluation
- UntitledDocument10 pagesUntitledbhffuhPas encore d'évaluation
- Ccp-Algèbre SARAHDocument21 pagesCcp-Algèbre SARAHSARAH ASSIMPas encore d'évaluation
- MMC Practice ExercisesDocument4 pagesMMC Practice ExercisescharidPas encore d'évaluation
- Extraits Des Problèmes Classiques-Reduction Des EndomorphismesDocument4 pagesExtraits Des Problèmes Classiques-Reduction Des EndomorphismesNabil Hafyene75% (4)
- Lemme Des NoyauxDocument2 pagesLemme Des NoyauxJesser DridiPas encore d'évaluation
- Télécharger Série N°1 Exercices Avec Corrigés de Module ALGEBRE 4 (Réduction Des Endomorphismes Et Applications) SMIA S3 PDFDocument2 pagesTélécharger Série N°1 Exercices Avec Corrigés de Module ALGEBRE 4 (Réduction Des Endomorphismes Et Applications) SMIA S3 PDFKhadija EL AAOUDPas encore d'évaluation
- Espaces Vectoriels PR Ehilbertiens R Eels Et Espaces Vectoriels EuclidiensDocument2 pagesEspaces Vectoriels PR Ehilbertiens R Eels Et Espaces Vectoriels EuclidiensSwayziiPas encore d'évaluation
- Formule de TaylorDocument2 pagesFormule de TaylorYounes EL BAHRAOUIPas encore d'évaluation
- TP3 Approximation Polynomiale CorrigeDocument15 pagesTP3 Approximation Polynomiale Corrigeguizeni ahmedPas encore d'évaluation
- Diagonalisation ImportantDocument9 pagesDiagonalisation ImportantAhmed fattoumPas encore d'évaluation
- X Ens MP 2016 Maths 3 EpreuveDocument6 pagesX Ens MP 2016 Maths 3 Epreuvemehdi benmassoudPas encore d'évaluation
- dm09 PDFDocument3 pagesdm09 PDFSafae IssaouiPas encore d'évaluation
- dm15 Bohr Mollerup SujetDocument3 pagesdm15 Bohr Mollerup SujetHamza TASSIPas encore d'évaluation
- Concours Centrale-Supélec 2021: La Loi Du Demi-CercleDocument6 pagesConcours Centrale-Supélec 2021: La Loi Du Demi-Cercleabdel dalilPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- Chapitre 0 Préambule, Motivations, Objectifs, PlanDocument12 pagesChapitre 0 Préambule, Motivations, Objectifs, PlanMohamed ES-SEDRATYPas encore d'évaluation
- Chapitre 3 Fichiers Et Entrées-SortiesDocument31 pagesChapitre 3 Fichiers Et Entrées-SortiesMohamed ES-SEDRATYPas encore d'évaluation
- Chapitre 1 IntroductionDocument21 pagesChapitre 1 IntroductionMohamed ES-SEDRATYPas encore d'évaluation
- TP6 Com Et Synchro (Les Signaux)Document1 pageTP6 Com Et Synchro (Les Signaux)Mohamed ES-SEDRATYPas encore d'évaluation
- Correction TP1 Commandes-UnixDocument2 pagesCorrection TP1 Commandes-UnixMohamed ES-SEDRATYPas encore d'évaluation
- Correction TP3 Programmation-ShellDocument2 pagesCorrection TP3 Programmation-ShellMohamed ES-SEDRATYPas encore d'évaluation
- Correction TP2 Commandes-Unix - (Suite)Document1 pageCorrection TP2 Commandes-Unix - (Suite)Mohamed ES-SEDRATYPas encore d'évaluation
- Demarrage LinuxDocument71 pagesDemarrage LinuxMohamed ES-SEDRATYPas encore d'évaluation
- TP1 KernelDocument6 pagesTP1 KernelMohamed ES-SEDRATYPas encore d'évaluation
- 06 Tp3 Threads Correction 2Document3 pages06 Tp3 Threads Correction 2Mohamed ES-SEDRATYPas encore d'évaluation
- Développement Des Pilotes - Séance 8Document107 pagesDéveloppement Des Pilotes - Séance 8Mohamed ES-SEDRATYPas encore d'évaluation
- Entrées-Sorties Et Gestion de La Mémoire Avec Temps Réel - Séance 6Document70 pagesEntrées-Sorties Et Gestion de La Mémoire Avec Temps Réel - Séance 6Mohamed ES-SEDRATYPas encore d'évaluation
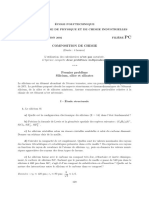
- Sec X 2002 Chi PCDocument11 pagesSec X 2002 Chi PCMohamed ES-SEDRATYPas encore d'évaluation
- DS Crist Rattrapage 2021 Thermo CristallochimieDocument1 pageDS Crist Rattrapage 2021 Thermo CristallochimieMohamed ES-SEDRATYPas encore d'évaluation
- MEDITER AVITEM Article Juillet 2015 AZZAG CorrigéDocument17 pagesMEDITER AVITEM Article Juillet 2015 AZZAG CorrigéAmar YounesPas encore d'évaluation
- Connaissances de Base en Thermodynamique Du Cycle Frigorifique - FrenchDocument2 pagesConnaissances de Base en Thermodynamique Du Cycle Frigorifique - FrenchdfdsfdsfPas encore d'évaluation
- Une Maison Bizarre - 2012-1-28 15-57-01758Document25 pagesUne Maison Bizarre - 2012-1-28 15-57-01758mostabouPas encore d'évaluation
- InfoDistribribution Select Corrige 2021Document22 pagesInfoDistribribution Select Corrige 2021Mario RcaPas encore d'évaluation
- Faisal - Touka-Reconnaissance de La Paume de La MainDocument146 pagesFaisal - Touka-Reconnaissance de La Paume de La Main2k Faisal100% (1)
- Dorothe 1985 - Allo Allo Monsieur L'ordinateur - ParolesDocument20 pagesDorothe 1985 - Allo Allo Monsieur L'ordinateur - Parolesvlad opranPas encore d'évaluation
- SIA 262.495 Bâtiment, Génie CivilDocument3 pagesSIA 262.495 Bâtiment, Génie CivilchatxxnoirPas encore d'évaluation
- JinjnhbDocument1 pageJinjnhbOUBAYIDIR aliPas encore d'évaluation
- Apprendre - Html.pour - Les.zeros NaWraS - EbookDocument0 pageApprendre - Html.pour - Les.zeros NaWraS - Ebookbassir2010Pas encore d'évaluation
- Devoirs 5Document1 pageDevoirs 5ANA LEONIPas encore d'évaluation
- Guide Pme VFDocument12 pagesGuide Pme VFIs Hagha YayaPas encore d'évaluation
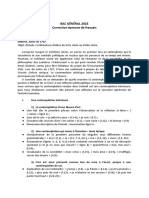
- Correction Bac Gen Francais CompletDocument11 pagesCorrection Bac Gen Francais CompletLETUDIANT50% (2)
- MA9 Calculalgebrique 3 Equations RadicauxDocument14 pagesMA9 Calculalgebrique 3 Equations RadicauxGatePas encore d'évaluation
- Theoechtagenotionbase PDFDocument18 pagesTheoechtagenotionbase PDFsafaePas encore d'évaluation
- Examen Regional Du BaccalaureatDocument3 pagesExamen Regional Du BaccalaureatKamal_Sat_2811Pas encore d'évaluation
- TP Metal 2-3-4Document8 pagesTP Metal 2-3-4Mahmoud RekikPas encore d'évaluation
- Chap 1 Reproduction Animaux A Completer 2022Document17 pagesChap 1 Reproduction Animaux A Completer 2022abounassim4Pas encore d'évaluation
- Info Hand 322Document8 pagesInfo Hand 322USJHANDBALLPas encore d'évaluation
- Mana StratDocument4 pagesMana StratMehdi SoltaniPas encore d'évaluation
- LP - CCT - S4 - GEL402 - Chapitre 5Document11 pagesLP - CCT - S4 - GEL402 - Chapitre 5Mazama-Esso Moddoh OclooPas encore d'évaluation
- Les Outils Indispensables Du Webmaster !Document4 pagesLes Outils Indispensables Du Webmaster !Lee DestructeurPas encore d'évaluation
- Permaculture - Le Guide Du Permaculteur Debutant-V2 PDFDocument53 pagesPermaculture - Le Guide Du Permaculteur Debutant-V2 PDFAlexPas encore d'évaluation
- Plans Annuel Et Déroulement Séquentiel 4APDocument6 pagesPlans Annuel Et Déroulement Séquentiel 4APAli KennichePas encore d'évaluation
- Profil en LongDocument4 pagesProfil en LongJihene Ben KacemPas encore d'évaluation
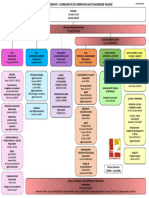
- Organigramme CCHMV - Janvier 2024Document1 pageOrganigramme CCHMV - Janvier 2024kocmelike2008Pas encore d'évaluation
- Programme D'entretien Preventif TEREXDocument12 pagesProgramme D'entretien Preventif TEREXMourad Wanen100% (1)
- Problèmes Économiques Et Sociaux - RésuméDocument10 pagesProblèmes Économiques Et Sociaux - RésuméIbrahim ElansariPas encore d'évaluation
- Exercices Calcul 3eme 4Document1 pageExercices Calcul 3eme 4bessama84Pas encore d'évaluation
- IshikawaDocument11 pagesIshikawaDonkihōte ShanksPas encore d'évaluation