Académique Documents
Professionnel Documents
Culture Documents
Schémas Classiques Des Moteurs Asynchrones
Transféré par
AZERTY darkCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Schémas Classiques Des Moteurs Asynchrones
Transféré par
AZERTY darkDroits d'auteur :
Formats disponibles
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
1 3 5
Q1
4
2 4 6 Q2
5 F1
1 3 5 AT
MA
95 96 1 2 3 4 A1 A2
KM1 KM1
2 4 6
6
KM1
13 14
7
1 3 5
KM1 H1
F1
61 62 X1 X2
2 4 6
8
H2
KM1
53 54 X1 X2
9 M
3~ F1 H3
97 98 X1 X2
10
11
ISTA BERKANE Dessiné par : 01
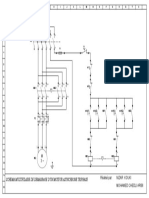
Démarrage direct un sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
1 3 5
Q2
Q1
2 4 6 F1
4 AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
KM1
5 KM1
13 14
1 3 5 1 3 5
KM1
KM1 KM2 MAR
3 4 61 62 A1 A2
6
2 4 6 2 4 6
KM2
KM2
13 14
7
H1
KM1 KM2
1 3 5 71 72 71 72 X1 X2
8
F1
2 4 6
H2
KM1
53 54 X1 X2
KM2 H3
M
53 54 X1 X2
3~
10
F1 H4
97 98 X1 X2
11
ISTA BERKANE Dessiné par : 02
Démarrage direct deux sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
1 3 5
Q1
2 4 6
4
1 3 5
Q2
KM1
5
2 4 6
1 3 5
F1
F1 AT
6 MA
2 4 6 95 96 1 2 3 4 A1 A2
KM1
7
KM1
13 14
W1
KM1 KM3
U1
V1
55 56 61 62 A1 A2
8
1 3 5 1 3 5 KM2
M
3~
KM2 2 4 6 2 4 6 KM3 KM1 KM2
67 68 61 62 A1 A2
W2
KM3
U2
V2
10
11
ISTA BERKANE Dessiné par : 03
Démarrage étoile-triangle un sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
1 3 5
3
Q1
Q2
2 4 6
4
F1
AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
1 3 5 1 3 5 KM1
5 KM2 KM1
2 4 6 2 4 6
KM1
13 14
KM1
6 MAR
3 4 61 62 A1 A2
KM2
1 3 5
F1
7
KM2
2 4 6 13 14
KM1
53 54 A1 A2
8 KT
W1
U1
V1
KM2
53 54
1 3 5 1 3 5
9
KM3 KM4
M
3~ KT KM4
2 4 6 2 4 6 55 56 61 62 A1 A2
KM3
W2
U2
V2
10
KM3
KT
67 68 61 62 A1 A2
KM4
11
ISTA BERKANE Dessiné par : 04
Démarrage étoile-triangle deux sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
3 1 3 5
Q1
2 4 6
4
Q2
1 3 5
5
KM1
2 4 6
F1
AT
6
MA
95 96 1 2 3 4 A1 A2
KM1
1 3 5 1 3 5
R1 KM1
7
KM2 13 14
2 4 6
2 4 6
8 KM1
67 68 A1 A2
KM2
1 3 5
9
F1
2 4 6
10
M
3~
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 05
Electromécanique des systèmes automatisés statoriques un sens de marche 2 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
N
1
5 6
Ph1
3 4
Ph2
2
1 2
Ph3
1 3 5
3 Q1
2 4 6
4 1 3 5 Q2
KM1
2 4 6
5
1 3 5 1 3 5 F1
AT
6
R1 MA
KM2 95 96 1 2 3 4 A1 A2
KM1
2 4 6
2 4 6
7
KM1
13 14
1 3 5 1 3 5 KM1
67 68 A1 A2
KM2
KM3 R2
8
2 4 6
2 4 6
KM2
67 68 A1 A2
KM3
9
1 3 5
F1
2 4 6
10
M
11 3~
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 06
Electromécanique des systèmes automatisés statoriques un sens de marche 3 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
3 1 3 5
Q1 Q2
2 4 6
4
F1
AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
KM1
5
1 3 5 1 3 5
KM1
KM2 KM1 13 14
2 4 6 2 4 6
6 KM1
MAR
3 4 61 62 A1 A2
KM2
7
1 3 5 1 3 5 KM2
13 14
KM3 R1
2 4 6
KM1
2 4 6 53 54 A1 A2
8 KT
KM2
53 54
1 3 5
9
F1
2 4 6
67 KT 68 A1 A2
10
KM3
M
3~
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 07
Electromécanique des systèmes automatisés statoriques deux sens de marche 2 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
N
1
5 6
Ph1
3 4
Ph2
2
1 2
Ph3
1 3 5
3 Q1 Q2
2 4 6
F1
4 AT KM2
1 3 5 1 3 5 MAV
95 96 1 2 3 4 61 62 A1 A2
KM1
KM2 KM1
2 4 6 2 4 6
5 KM1
13 14
1 3 5 KM1
1 3 5 MAR
3 4 61 62 A1 A2
6
R1 KM2
KM3
2 4 6
2 4 6 KM2
13 14
7
1 3 5
1 3 5 KM1
53 54 A1 A2
KM4 R2 KT
8 2 4 6
2 4 6 KM2
53 54
1 3 5
9
F1
2 4 6 67 KT 68 A1 A2
KM3
10
M KM3
67 68 A1 A2
3~ KM4
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 08
Electromécanique des systèmes automatisés statoriques deux sens de marche 3 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
1 3 5
4
Q1 Q2
2 4 6
1 3 5
KM1 F1
AT
6
2 4 6
MA
95 96 1 2 3 4 A1 A2
KM1
7 1 3 5
KM1
13 14
F1
2 4 6
8
KM1
67 68 A1 A2
KM2
W
U
1 3 5 1 3 5 M
9
R1
3~
KM2
2 4 6
M
K
2 4 6
10
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 09
Electromécanique des systèmes automatisés rotoriques un sens de marche 2 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
1 3 5
4
Q1 Q2
2 4 6
1 3 5
KM1
6 F1
2 4 6 AT
1 3 5 1 3 5 MA
95 96 1 2 3 4 A1 A2
KM1
KM2 R1
7 1 3 5
2 4 6
2 4 6 KM1
F1 13 14
2 4 6
KM1
67 68 A1 A2
8 KM2
W
U
1 3 5 1 3 5 M KM2
9
R2
3~ 67 68 A1 A2
KM3
KM3
2 4 6
M
K
2 4 6
10
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 10
Electromécanique des systèmes automatisés rotoriques un sens de marche 3 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
1 3 5
Q1 Q2
4 2 4 6
F1
AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
5 KM1
1 3 5 1 3 5
KM1
KM2 KM1 13 14
6
2 4 6 2 4 6
KM1
MAR
3 4 61 62 A1 A2
KM2
7
KM2
13 14
1 3 5
F1
8 2 4 6 KM1
53 54 A1 A2
KT
W
U
9
KM2
53 54
1 3 5 1 3 5 M
R1
3~
KM3
10 2 4 6 67 KT 68 A1 A2
M
K
2 4 6 KM3
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 11
Electromécanique des systèmes automatisés rotoriques deux sens de marche 2 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
1 3 5
3
Q1
Q2
2 4 6
4
F1
AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
1 3 5 1 3 5 KM1
5
KM2 KM1
2 4 6 2 4 6
KM1
13 14
6 KM1
MAR
3 4 61 62 A1 A2
KM2
7
1 3 5 1 3 5 KM2
13 14
KM3 R1
1 3 5
KM1
2 4 6
2 4 6 F1 53 54 A1 A2
8 KT
2 4 6
KM2
W
53 54
U
1 3 5 1 3 5 M 67 KT 68 A1 A2
KM3
R2
3~
10
KM4
2 4 6 KM3
M
K
2 4 6 67 68 A1 A2
KM4
11
ISTA BERKANE Démarrage par élimination des résistances Dessiné par : 12
Electromécanique des systèmes automatisés rotoriques deux sens de marche 3 temps Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
3 1 3 5
Q1
Q2
2 4 6
4
5 F1
AT
1 3 5 1 3 5
MA
95 96 1 2 3 4 A1 A2
KM1
KM1 KM3
6
2 4 6 2 4 6 KM1
13 14
KM1 KM3
7 55 56 61 62 A1 A2
KM2
8 1 3 5
KM1
67 68 A1 A2
KT
F1
1 3 5 2 4 6
KM2
KT
9 KM2 67 68 61 62 A1 A2
KM3
2 4 6
10
M
3~
11
ISTA BERKANE Dessiné par : 13
Démarrage par autotransformateur un sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
1 3 5
3
Q1
Q2
2 4 6
4
F1
AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
1 3 5 1 3 5
KM1
5
KM1 KM2
KM1
13 14
2 4 6 2 4 6
KM1
6 MAR
3 4 61 62 A1 A2
KM2
7
1 3 5 KM2
13 14
KM4
2 4 6 KM1
53 54 A1 A2
8
KT1
1 3 5 KM2
53 54
F1 KT1 KM4
9 2 4 6 55 56 61 62 A1 A2
1 3 5 KM3
KM3
2 4 6
KT1
67 68 A1 A2
10 KT2
M KM3
3~ KT2
67 68 61 62 A1 A2
11
KM4
ISTA BERKANE Dessiné par : 14
Démarrage par autotransformateur deux sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
Q2
1 3 5
Q1
F1 F2
4 AT KM2
2 4 6 PV
95 96 95 96 1 2 3 4 61 62 A1 A2
KM1
5 KM1
13 14
KM1
GV
3 4 61 62 A1 A2
6 1 3 5 1 3 5 KM2
KM1 KM2
2 4 6 2 4 6
KM2
13 14
7
KM1 KM2 H1
71 72 71 72 X1 X2
8
1 3 5 1 3 5
KM1 H2
F1 F2
53 54 X1 X2
2 4 6 2 4 6
W2 U1
9
KM2 H3
V2 V1 53 54 X1 X2
3~M
U2 W1
10 F1 H4
97 98 X1 X2
F2
11 97 98
ISTA BERKANE Démarrage moteur à 2 vitesses à enroulements séparés Dessiné par : 15
Electromécanique des systèmes automatisés un sens de marche Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
Q2
1 3 5
Q1
F1 F2
4 AT KM2 KM3 KM4
2 4 6 S1
95 96 95 96 1 2 3 4 61 62 61 62 61 62 A1 A2
KM1
5 KM1
13 14
KM1 KM3 KM4
S2
3 4 61 62 61 62 61 62 A1 A2
6 1 3 5 1 3 5 1 3 5 1 3 5 KM2
KM2
KM1 2 4 6 KM2 2 4 6 KM3 2 4 6 KM4 2 4 6 13 14
7
KM1 KM2 KM4
S3
3 4 61 62 61 62 61 62 A1 A2
KM3
8
1 3 5 1 3 5 KM2
13 14
F1 F2
9 2 4 6 2 4 6
W2 U1 KM1 KM2 KM3
S4
3 4 61 62 61 62 61 62 A1 A2
KM4
V2 V1
3~M
10
U2 W1 KM2
13 14
11
ISTA BERKANE Démarrage moteur à 2 vitesses à enroulements séparés Dessiné par : 16
Electromécanique des systèmes automatisés deux sens de marche Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
1 3 5
3
Q1 Q2
2 4 6
F1 F2
4 AT KM2
PV
95 96 95 96 1 2 3 4 61 62 A1 A2
KM1
5 KM1
13 14
1 3 5 1 3 5
KM1 KM2 KM1
GV
3 4 61 62 A1 A2
6 2 4 6 2 4 6 KM2
KM2 A1 A2
1 3 5 1 3 5 13 14 KM3
7 F1 F2
2 4 6 2 4 6
1 3 5
KM1 KM2 H1
71 72 71 72 X1 X2
8
KM3
2 4 6 KM1 H2
53 54 X1 X2
9
KM2 H3
U1 U2 53 54 X1 X2
V1 V2
10 3~M F1 H4
97 98 X1 X2
W1 W2
F2
11 97 98
ISTA BERKANE Démarrage moteur à 2 vitesses type DAHLANDER Dessiné par : 17
Electromécanique des systèmes automatisés un sens de marche Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
1 3 5 Q2
Q1
F1 F2
4 2 4 6 AT KM2 KM3 KM4
S1
95 96 95 96 1 2 3 4 61 62 61 62 61 62 A1 A2
KM1
5 KM1
13 14
KM1 KM3 KM4
S2
3 4 61 62 61 62 61 62 A1 A2
6
1 3 5 1 3 5 1 3 5 1 3 5 KM2
KM2
KM1 2 4 6 KM2 2 4 6 KM3 2 4 6 KM4 2 4 6 13 14
7 KM1 KM2 KM4
S3
3 4 61 62 61 62 61 62 A1 A2
KM3
8 KM2
13 14
1 3 5 1 3 5
F1 F2 KM1 KM2 KM3
S4
2 4 6 2 4 6 3 4 61 62 61 62 61 62 A1 A2
9
KM4
U1 U2
V1 V2 KM2
3~M 13 14
10 W1 W2
KM3
3 4 13 14 A1 A2
KM5
KM5
11
1 2 KM4
13 14
ISTA BERKANE Démarrage moteur à 2 vitesses type DAHLANDER Dessiné par : 18
Electromécanique des systèmes automatisés deux sens de marche Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
1 3
3
Q1
2 4
4
Q2
1 3 5
KM1
5
2 4 6
F1
AT
6 1 3 5
MA
95 96 1 2 3 4 A1 A2
KM1
F1
2 4 6
KM1
13 14
7
8
KM1
55 56 A1 A2
1 3 5 KM2
KM2
9 2 4 6
1
10 3
M
1~ 4
11
C
ISTA BERKANE Dessiné par : 19
Démarrage moteur monophasé un sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1
N
5 6
Ph1
3 4
2
Ph2
1 2
Ph3
1 3
3
Q1
Q2
2 4
4
F1
AT KM2 KM3
1 3 5 MAV
95 96 1 2 3 4 61 62 55 56 A1 A2
KM1
KM3
5
2 4 6
KM1
13 14
KM1 KM3
6 1 3 5 MAR
3 4 61 62 55 56 A1 A2
F1 KM2
2 4 6
7
KM2
13 14
KM1
53 54 A1 A2
8 KM3
1 3 5 1 3 5
KM1 KM2 KM2
53 54
9 2 4 6 2 4 6
1
KM3
13 14
10 3
M
1~ 4
11
C
ISTA BERKANE Dessiné par : 20
Démarrage moteur monophasé deux sens de marche
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
1 3 5
Q1
4 Q2
2 4 6
5 1 3 5
F1
AT
KM1 MA
95 96 1 2 3 4 A1 A2
2 4 6
KM1
6
KM1
13 14
1 3 5
F1
7 2 4 6
A1 A2
9
M
10 3~
11
ISTA BERKANE Dessiné par : 21
Freinage par électrofrein à manque de courant
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
3
1 3 5
Q1
Q2
2 4 6
4
F1
AT KM2
MA
95 96 1 2 3 4 61 62 A1 A2
KM1
5
1 3 5 1 3 5
KM1
KM1 KM2 13 14
2 4 6 2 4 6
6
KM2 KM1
1 3 5
1 3 5 Fr
3 4 55 56 61 62 A1 A2
F1 KM2
7 2 4 6
2 4 6 KM2
13 14
10
M
3~
11
ISTA BERKANE Dessiné par : 22
Freinage par contre courant
Electromécanique des systèmes automatisés Issam ABDALLAH 23
A B C D E F G H I J K L M N O P Q
7 8
1 N
5 6
Ph1
3 4
2 Ph2
1 2
Ph3
1 3 5
3
Q1
2 4 6 Q2
4
F1
AT KM2
MAV
95 96 1 2 3 4 61 62 A1 A2
1 3 5 1 3 5
KM1
5
KM1 KM2
KM1
13 14
2 4 6 2 4 6
KM1 KM1
1 3 5 57 58 61 62 A1 A2
KM2
7
F1
2 4 6
10
M
3~
11
ISTA BERKANE Dessiné par : 23
Freinage par injection de courant continu
Electromécanique des systèmes automatisés Issam ABDALLAH 23
Vous aimerez peut-être aussi
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Demarrage MoteurDocument15 pagesDemarrage MoteurIsmael ZerboPas encore d'évaluation
- Shema MultifilaireDocument1 pageShema MultifilaireKouki NizarPas encore d'évaluation
- TD Electron I Quel 2Document135 pagesTD Electron I Quel 2HaitamElbathaoui100% (3)
- Lélectricité IndustrielleDocument13 pagesLélectricité IndustriellesalmiPas encore d'évaluation
- Resume STS2 15 Machine SynchroneDocument5 pagesResume STS2 15 Machine SynchroneMOHAMMED AMINE AMLILAPas encore d'évaluation
- Demarrage Statorique 2 Sens 3 TempsDocument1 pageDemarrage Statorique 2 Sens 3 TempsAssia Saoudi100% (2)
- Circuitspneumatiques Cour TP n02Document26 pagesCircuitspneumatiques Cour TP n02Youssef LANDOLSI100% (1)
- TD 3 95Document4 pagesTD 3 95Leroy Lionel Sonfack100% (1)
- 13-Démarrage Étoile-Triangle 2 Sens de Marche Avec Fin de CourseDocument1 page13-Démarrage Étoile-Triangle 2 Sens de Marche Avec Fin de CourseMerveil Borgeas100% (1)
- Synthese Des Hacheurs JCRDocument7 pagesSynthese Des Hacheurs JCRDriss GhandiPas encore d'évaluation
- Demarrage MASDocument15 pagesDemarrage MASMohamed OuiddadPas encore d'évaluation
- TP 12 81Document8 pagesTP 12 81leukwe delphesPas encore d'évaluation
- Démarrage Direct 1 Sens de RotationDocument1 pageDémarrage Direct 1 Sens de RotationHouili MohamedPas encore d'évaluation
- MotorisationDocument18 pagesMotorisationABIRADAMPas encore d'évaluation
- Demarrages MoteurDocument6 pagesDemarrages MoteurSonia Lazaar ChokriPas encore d'évaluation
- TransfoDocument20 pagesTransfobachir iboun habou iboun ibrahim100% (1)
- CoursDocument16 pagesCoursEmna Gaaloul100% (1)
- Folio 1Document2 pagesFolio 1El Hadji Mandella NdiayePas encore d'évaluation
- Nrb003 Le Contacteur de Puissance ElectriqueDocument3 pagesNrb003 Le Contacteur de Puissance Electriquekarim boudisPas encore d'évaluation
- Chapitre 04-Trois Modes de Commande D'un Moteur ÉlectriqueDocument8 pagesChapitre 04-Trois Modes de Commande D'un Moteur Électriquemouadh mimouniPas encore d'évaluation
- Exo Cor TransfoDocument4 pagesExo Cor TransfoAgrima AbdellahPas encore d'évaluation
- TP9 - Schémaplic Installation de Climatisation - v2k6Document8 pagesTP9 - Schémaplic Installation de Climatisation - v2k6Ahmed AboubakerPas encore d'évaluation
- Demarrage Direct 1 Sens de Rotation .Document1 pageDemarrage Direct 1 Sens de Rotation .Chems Eddine HachaniPas encore d'évaluation
- Exemple 06 - Démarrage Étoile-TriangleDocument1 pageExemple 06 - Démarrage Étoile-TriangleEl Kachani AbderrahmanPas encore d'évaluation
- Demarrage Rotorique 1 Sens 2 TempsDocument1 pageDemarrage Rotorique 1 Sens 2 TempsMouhamed Sàrr CissePas encore d'évaluation
- Résumé Chapitre 1 Commande Des Machines ÉlectriquesDocument7 pagesRésumé Chapitre 1 Commande Des Machines Électriquesmed chemkhiPas encore d'évaluation
- Examen de Fin de Module Installation Entretien Commande A TBT TemiDocument2 pagesExamen de Fin de Module Installation Entretien Commande A TBT TemisbensouayahPas encore d'évaluation
- 1734 PDFDocument6 pages1734 PDFMoussaPouyePas encore d'évaluation
- TP 01-Tpe 62Document3 pagesTP 01-Tpe 62Âÿ ØübPas encore d'évaluation
- 06 Exercice Synthese CorrigeDocument7 pages06 Exercice Synthese CorrigeCalLmeBiggzRozay100% (1)
- TP ElechtroticniqueDocument5 pagesTP ElechtroticniqueAsm MaPas encore d'évaluation
- TempoDocument10 pagesTempoAchraf AchPas encore d'évaluation
- Machines ÉlectriquesDocument55 pagesMachines ÉlectriquesEric SonaPas encore d'évaluation
- Alimentation Moteur TriphaseDocument2 pagesAlimentation Moteur TriphaseABDEDDAIM EL HAFIDIPas encore d'évaluation
- GradateurDocument12 pagesGradateurFouad ElhajjiPas encore d'évaluation
- 05 RelaisthermDocument23 pages05 RelaisthermGajo MouandzaPas encore d'évaluation
- FR Technical Guide No 7 REVCDocument40 pagesFR Technical Guide No 7 REVCbado badoxPas encore d'évaluation
- Expose: L' ÉlectrotechniqueDocument37 pagesExpose: L' ÉlectrotechniqueRayane BkrPas encore d'évaluation
- TD N°1-Eq Puiss - Redress MonoDocument5 pagesTD N°1-Eq Puiss - Redress MonoTG RIDAPas encore d'évaluation
- 2 - Distribuer Welec - Relais+contacteursDocument10 pages2 - Distribuer Welec - Relais+contacteursCH -GAMESPas encore d'évaluation
- Travaux Dirigés Mobilité Électrique: Dut Geii - 2 Année Module at 11Document18 pagesTravaux Dirigés Mobilité Électrique: Dut Geii - 2 Année Module at 11Islam MęĐjPas encore d'évaluation
- Modifier Un Circuit de Commande en PneumatiqueDocument15 pagesModifier Un Circuit de Commande en PneumatiquechahiPas encore d'évaluation
- Etude Composant Depart Moteur DRDocument15 pagesEtude Composant Depart Moteur DRDjamal Zenaidi100% (1)
- TP Aghalba Partie ÉlectriqueDocument19 pagesTP Aghalba Partie ÉlectriqueRafraf EzdinePas encore d'évaluation
- CHAÎNE D'ENERGIE Fonction Alimenter Doc-ProfDocument12 pagesCHAÎNE D'ENERGIE Fonction Alimenter Doc-Profyassine lakhalPas encore d'évaluation
- TDN°1 Commande Des Machines ElectriquesDocument8 pagesTDN°1 Commande Des Machines ElectriquesHamid OUTZGUINRIMT100% (1)
- Étude D Une Perceuse Sur Colonne S2 Utilisation de L Énergie Électrique S2-3 Force Motrice - Le Moteur Asynchrone TriphaséDocument25 pagesÉtude D Une Perceuse Sur Colonne S2 Utilisation de L Énergie Électrique S2-3 Force Motrice - Le Moteur Asynchrone TriphaséAziz AkbPas encore d'évaluation
- Cours Pratique Cablage D'un Demarrage Direct Moteur AsynchroneDocument13 pagesCours Pratique Cablage D'un Demarrage Direct Moteur AsynchroneThierry roland UmPas encore d'évaluation
- Corrige 5Document22 pagesCorrige 5loicPas encore d'évaluation
- Polycope Activité 2017-2019Document64 pagesPolycope Activité 2017-2019Ali BoukhrissPas encore d'évaluation
- Cours Alimentation STSDocument6 pagesCours Alimentation STSMohamed Ali DaymiPas encore d'évaluation
- Distribuer en Energie Electrique FD Doc Prof - NASRIDocument14 pagesDistribuer en Energie Electrique FD Doc Prof - NASRIDadi DadiPas encore d'évaluation
- Cours8 Modèle MASDocument26 pagesCours8 Modèle MASKamal PcPas encore d'évaluation
- Sujet Concours PLP Électrotechnique 2002Document52 pagesSujet Concours PLP Électrotechnique 2002Philippe PouletPas encore d'évaluation
- Modes Dã©marrage1Document6 pagesModes Dã©marrage1DIC 1 G.EPas encore d'évaluation
- Démarrage Direct 2 SensDocument1 pageDémarrage Direct 2 Sensantonella100% (1)
- Theme Transfert ExamenDocument2 pagesTheme Transfert Examenjd9c8jtyg7Pas encore d'évaluation
- Démarrage Étoile-Triangle 2 SensDocument1 pageDémarrage Étoile-Triangle 2 Sensantonella0% (1)
- Demarrage Etoile-Triangle 1 SensDocument1 pageDemarrage Etoile-Triangle 1 SensShane LendoyePas encore d'évaluation
- Analyse de Fonctionnement: Moteur Asynchrone Tri.: Démarrage Direct 1 SensDocument7 pagesAnalyse de Fonctionnement: Moteur Asynchrone Tri.: Démarrage Direct 1 SensdidierpietquinPas encore d'évaluation
- TD TriphaseDocument3 pagesTD TriphaseEZ-ZYANI IMANE100% (1)
- Relation ADCDocument3 pagesRelation ADCAZERTY darkPas encore d'évaluation
- TriphaséserieDocument7 pagesTriphaséserieanas_hanouna100% (1)