Vous aimerez peut-être aussi
- CEJM - Th02 Chap11 Cours Synthese CorrigéDocument12 pagesCEJM - Th02 Chap11 Cours Synthese CorrigéNarjès Bouzouita100% (1)
- Plus de 70 Exercices Ondes Et Vibrations+CorrigesDocument31 pagesPlus de 70 Exercices Ondes Et Vibrations+CorrigesOthniel Meignan100% (3)
- TD2. RécursivitéDocument5 pagesTD2. RécursivitéMed Yacine100% (1)
- Algorithmique Et Structure de Donnees IDocument34 pagesAlgorithmique Et Structure de Donnees IPréncess MériixXà100% (1)
- Les Conserves - Contrôle de QualitéDocument20 pagesLes Conserves - Contrôle de QualitéYassine Boujlal67% (3)
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Exam Algo 02 SMI3 SN 1718Document2 pagesExam Algo 02 SMI3 SN 1718anas100% (1)
- Solution TD2 Procédures Et FonctionsDocument13 pagesSolution TD2 Procédures Et FonctionsAnis SaiedPas encore d'évaluation
- DS Programmation C 1info Iset Rades Nov2017Document2 pagesDS Programmation C 1info Iset Rades Nov2017Majd SaidaniPas encore d'évaluation
- Série D'exercices N°1 - Algorithmique - Bac Informatique (2010-2011) Elève Mahdhi MabroukDocument2 pagesSérie D'exercices N°1 - Algorithmique - Bac Informatique (2010-2011) Elève Mahdhi MabroukSaifeddine Makni100% (2)
- Exos Sur La Structure D'enregistrementDocument6 pagesExos Sur La Structure D'enregistrementcélia haouitPas encore d'évaluation
- Algorithmique II Examen Final 2018 - 2019 CorrDocument4 pagesAlgorithmique II Examen Final 2018 - 2019 CorrSalma HaouchPas encore d'évaluation
- Série D'exercices N°2 - Algorithmique Pour La Revision - Bac Informatique (2010-2011) Elève Mahdhi MabroukDocument3 pagesSérie D'exercices N°2 - Algorithmique Pour La Revision - Bac Informatique (2010-2011) Elève Mahdhi MabroukSaifeddine MakniPas encore d'évaluation
- Série2 Des Exercice FinaleDocument3 pagesSérie2 Des Exercice FinaleNizar SdiriPas encore d'évaluation
- Devoir Controle Informatique 2 CorrigéDocument3 pagesDevoir Controle Informatique 2 CorrigéhalissoPas encore d'évaluation
- TD 3 - PointeursDocument3 pagesTD 3 - PointeursWarda FloraPas encore d'évaluation
- Correction TD PointeurDocument5 pagesCorrection TD PointeurKaouther KhalilPas encore d'évaluation
- TD 4 Chaines CaractèresDocument4 pagesTD 4 Chaines CaractèresO ZPas encore d'évaluation
- Correction Serie RecursiviteDocument3 pagesCorrection Serie Recursiviteayari dali75% (4)
- Cours Les EnregistrementsDocument8 pagesCours Les Enregistrementsprofinfonew75% (4)
- S Rie 2 Tableaux Et MatricesDocument2 pagesS Rie 2 Tableaux Et Matricesgizlan0% (1)
- Correction de Devoir de Synthèse N3-2019Document4 pagesCorrection de Devoir de Synthèse N3-2019Oussama Boughamoura0% (1)
- Serie RécursivitéDocument3 pagesSerie RécursivitéBelgasem Assel100% (1)
- Correction Tableau EnregistrementDocument15 pagesCorrection Tableau Enregistrementben Mhamed IssamPas encore d'évaluation
- S1-Fonctions Et ProcéduresDocument3 pagesS1-Fonctions Et ProcéduresMariem SelmiPas encore d'évaluation
- DS1 3si Algo 2021 2022Document4 pagesDS1 3si Algo 2021 2022Younes Bel BahriPas encore d'évaluation
- TD Compléxité RécursivitéDocument5 pagesTD Compléxité RécursivitéBRINDA NODEMPas encore d'évaluation
- RécursivitéDocument54 pagesRécursivitéObamaPas encore d'évaluation
- TD Algo2 1415 FichiersDocument5 pagesTD Algo2 1415 FichiersGirlPas encore d'évaluation
- TD Info Algorithmique Programmation Terminale DDocument5 pagesTD Info Algorithmique Programmation Terminale Dprince.elbachirPas encore d'évaluation
- Serie 4siDocument4 pagesSerie 4siRouaissi Ridha100% (1)
- TD N°3 Pile PDFDocument3 pagesTD N°3 Pile PDFMakrem NessibPas encore d'évaluation
- Atelier 03 - Operations Sur Les TableauxDocument13 pagesAtelier 03 - Operations Sur Les TableauxOUMAIMA BAHAFIDPas encore d'évaluation
- Les Structures de DonnéesDocument356 pagesLes Structures de DonnéesbwajihPas encore d'évaluation
- Lesalgorithmesdarithmetiques 120820133902 Phpapp01Document16 pagesLesalgorithmesdarithmetiques 120820133902 Phpapp01jihenPas encore d'évaluation
- Chapitre 1-Structures de DonnéesDocument32 pagesChapitre 1-Structures de DonnéesHoussem HaddedPas encore d'évaluation
- Cours AlgorithmeDocument77 pagesCours AlgorithmeCRESUSPas encore d'évaluation
- PSD Td4 Listes CorrigeDocument13 pagesPSD Td4 Listes CorrigenabilaPas encore d'évaluation
- Cours 3 Fonctions ProceduresDocument22 pagesCours 3 Fonctions ProceduresAbdoulaye DIALLO100% (1)
- Serie 4 PDFDocument2 pagesSerie 4 PDFSafowanPas encore d'évaluation
- Les Fonctions Et ProceduresDocument12 pagesLes Fonctions Et Proceduresapi-26420184Pas encore d'évaluation
- Exercice D'algorithme 2Document2 pagesExercice D'algorithme 2Amine BouchikhiPas encore d'évaluation
- Correction TD 3Document7 pagesCorrection TD 3Hhgjgjt Hruto699Pas encore d'évaluation
- 2 Correction PointeurDocument4 pages2 Correction Pointeurjack mora100% (1)
- Examen S1 2017 2018 CorrigDocument2 pagesExamen S1 2017 2018 CorrigESI100% (1)
- TD2 AlgoDocument2 pagesTD2 AlgoHICHEM BEHIRIPas encore d'évaluation
- Pile FileDocument103 pagesPile FileStaphanie MelPas encore d'évaluation
- Examen Dalgorithmes Structure de Donnees 2 PDFDocument2 pagesExamen Dalgorithmes Structure de Donnees 2 PDFhamdaouyPas encore d'évaluation
- Correction TD N°9Document3 pagesCorrection TD N°9zbm2427Pas encore d'évaluation
- Série 2Document2 pagesSérie 2heho haha0% (1)
- 02 - Exercices de Préparation Aux ExamensDocument4 pages02 - Exercices de Préparation Aux Examensdovah14136Pas encore d'évaluation
- Corrigé de La Série de TD N 03 de Structures de DonnéesDocument8 pagesCorrigé de La Série de TD N 03 de Structures de DonnéesHoussem Brini0% (2)
- Lesalgorithmesrecurrents 120820142044 Phpapp01Document10 pagesLesalgorithmesrecurrents 120820142044 Phpapp01Samir2020Pas encore d'évaluation
- Cours 3eme 2021 - 2022 - Élève - Partie7 - Enregistrements Et Vecteurs D'enregistrementsDocument4 pagesCours 3eme 2021 - 2022 - Élève - Partie7 - Enregistrements Et Vecteurs D'enregistrementsHassan Hachicha100% (1)
- Exo & Corrigés Les Pointeurs en Langage CDocument10 pagesExo & Corrigés Les Pointeurs en Langage CLamboni Djapiéne Feïkissob PagePas encore d'évaluation
- Exercices de RévisionDocument9 pagesExercices de RévisionTeka Akram100% (8)
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsD'EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsPas encore d'évaluation
- 6 Tri RapideDocument8 pages6 Tri RapideetalieezechielPas encore d'évaluation
- Correction - TD - Algo - IN3 2020Document13 pagesCorrection - TD - Algo - IN3 2020Nadia DjioPas encore d'évaluation
- Serie 2 ComplexitecorrectionDocument4 pagesSerie 2 ComplexitecorrectionChouichi GhadaPas encore d'évaluation
- Lettre de MotivationDocument1 pageLettre de MotivationOthniel MeignanPas encore d'évaluation
- CHAPITRE V: Les Mortiers Hydrauliques: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilDocument9 pagesCHAPITRE V: Les Mortiers Hydrauliques: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilOthniel MeignanPas encore d'évaluation
- CHAPITRE VI: Technologie Des Bétons: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilDocument11 pagesCHAPITRE VI: Technologie Des Bétons: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilOthniel MeignanPas encore d'évaluation
- Institut Universitaire D'abidjan: Intitule Du Cours: Matériaux de Construction 1 (ECUE: Matériaux de Construction 1)Document4 pagesInstitut Universitaire D'abidjan: Intitule Du Cours: Matériaux de Construction 1 (ECUE: Matériaux de Construction 1)Othniel MeignanPas encore d'évaluation
- Chapitre Iv: L: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilDocument6 pagesChapitre Iv: L: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilOthniel MeignanPas encore d'évaluation
- DEVOIR N°2 de Matériaux de ConstructionDocument6 pagesDEVOIR N°2 de Matériaux de ConstructionOthniel MeignanPas encore d'évaluation
- Chapitre Iii: Les Liants: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilDocument21 pagesChapitre Iii: Les Liants: Cours de Matériaux de Construction Deuxième Année LMD en Génie CivilOthniel MeignanPas encore d'évaluation
- Travaux Dirigés N°1: Partie 1: Caractéristiques Des SolsDocument4 pagesTravaux Dirigés N°1: Partie 1: Caractéristiques Des SolsOthniel MeignanPas encore d'évaluation
- Travaux Dirigés 02: Partie 1: Étude D'une Composition de Béton Par La Méthode DREUX-GORISSEDocument1 pageTravaux Dirigés 02: Partie 1: Étude D'une Composition de Béton Par La Méthode DREUX-GORISSEOthniel MeignanPas encore d'évaluation
- Cours Complexes GeometrieDocument9 pagesCours Complexes GeometrieOthniel MeignanPas encore d'évaluation
- Nombres Complexes Forme Algebrique Ecriture CartesienneDocument14 pagesNombres Complexes Forme Algebrique Ecriture CartesienneOthniel MeignanPas encore d'évaluation
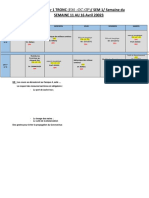
- EDT Master 1 Tronc 2022-2023Document2 pagesEDT Master 1 Tronc 2022-2023Othniel MeignanPas encore d'évaluation
- Une Formation Complète: Rechercher Sur Le Site..Document37 pagesUne Formation Complète: Rechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- 128Document5 pages128Othniel MeignanPas encore d'évaluation
- IUA L1 Ana Vectoriel Session 2 2019Document1 pageIUA L1 Ana Vectoriel Session 2 2019Othniel Meignan100% (1)
- Liste de PrimitivesDocument1 pageListe de PrimitivesOthniel Meignan100% (1)
- Rechercher Sur Le Site..Document16 pagesRechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- Equation Différentielle CompletDocument21 pagesEquation Différentielle CompletOthniel MeignanPas encore d'évaluation
- Rechercher Sur Le Site..Document15 pagesRechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- Rechercher Sur Le Site..Document28 pagesRechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- Rechercher Sur Le Site..Document19 pagesRechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- Document de Kholle LakaléDocument1 pageDocument de Kholle LakaléOthniel MeignanPas encore d'évaluation
- Mécanal-1 (Mode de Compatibilité)Document53 pagesMécanal-1 (Mode de Compatibilité)Othniel MeignanPas encore d'évaluation
- Rechercher Sur Le Site..Document30 pagesRechercher Sur Le Site..Othniel MeignanPas encore d'évaluation
- CCP PC 2004 Physique 1 EnonceDocument11 pagesCCP PC 2004 Physique 1 EnonceOthniel MeignanPas encore d'évaluation
- Corrige1 Physique 1 CCP PC 2004Document3 pagesCorrige1 Physique 1 CCP PC 2004Othniel MeignanPas encore d'évaluation
- Algorithmes de Tri Cours Et ExercicesDocument15 pagesAlgorithmes de Tri Cours Et ExercicesOthniel MeignanPas encore d'évaluation
- Mécanal-2 (Mode de Compatibilité)Document96 pagesMécanal-2 (Mode de Compatibilité)Othniel MeignanPas encore d'évaluation
- Gestion Stratégique Du Capital HumainDocument34 pagesGestion Stratégique Du Capital Humainyoussef Ait-omarPas encore d'évaluation
- 426-Blenders Et CentrifugeusesDocument6 pages426-Blenders Et CentrifugeusesK19CPas encore d'évaluation
- Formulation de Béton Hydraulique - Indice 0Document44 pagesFormulation de Béton Hydraulique - Indice 0laroussi aymenPas encore d'évaluation
- Fabrication Du Vin (2Document4 pagesFabrication Du Vin (2Rachid ben100% (1)
- Kettani Hassani - Partage D'infoDocument24 pagesKettani Hassani - Partage D'infohasnaPas encore d'évaluation
- Cours de MatérielsDocument127 pagesCours de MatérielsGrace Emile Moelet Goma100% (5)
- Analyse FinancièreDocument64 pagesAnalyse Financièremonouche02Pas encore d'évaluation
- Invitation GabonDocument1 pageInvitation GabonJordy SincéPas encore d'évaluation
- Pompe À VideDocument4 pagesPompe À VideHéritier MasudiPas encore d'évaluation
- Exercices Chap10Document5 pagesExercices Chap10Arnold KpovihouanouPas encore d'évaluation
- Soleil Royal French - Pack 04 - Phases 30 A 42Document54 pagesSoleil Royal French - Pack 04 - Phases 30 A 42Alain GayetPas encore d'évaluation
- Poka YokeDocument14 pagesPoka YokeRahma BarkitPas encore d'évaluation
- F1 Fiche 2 DexercicesDocument2 pagesF1 Fiche 2 Dexercicestoscane.gianlupi.tenouxPas encore d'évaluation
- Cours PHPDocument191 pagesCours PHPBrice AboloPas encore d'évaluation
- Diapo 1 - Notions GénéralesDocument24 pagesDiapo 1 - Notions GénéralesAdila DjelailiaPas encore d'évaluation
- APRIMATICDocument233 pagesAPRIMATICAndrás TóthPas encore d'évaluation
- Rapport de Stage PrevDocument4 pagesRapport de Stage Prevayarinour11100Pas encore d'évaluation
- La Comptabilité Analytique: Introduction & FondementsDocument107 pagesLa Comptabilité Analytique: Introduction & FondementsMounia El Hassbi100% (1)
- QCM Linux PARTIE 1Document3 pagesQCM Linux PARTIE 1AwonoPas encore d'évaluation
- Chaignet - Commentaire Sur Le Parmenide, (FR), t.1, 1900Document352 pagesChaignet - Commentaire Sur Le Parmenide, (FR), t.1, 1900JeanPas encore d'évaluation
- Fiche de Poste - Stage Industrie Chez France Energie EolienneDocument1 pageFiche de Poste - Stage Industrie Chez France Energie EolienneFrance Energie EoliennePas encore d'évaluation
- Module 3 CCNPDocument14 pagesModule 3 CCNPLipouki TindamePas encore d'évaluation
- Ansoumane KeitaDocument1 pageAnsoumane KeitaMarie WilkinsonPas encore d'évaluation
- Chaine D'énergieDocument11 pagesChaine D'énergieMehdi BKPas encore d'évaluation
- Session Juin 2012 Sujet COMMERCE BD Fugue CafeDocument27 pagesSession Juin 2012 Sujet COMMERCE BD Fugue CafeRafik RafikPas encore d'évaluation
- Le Rapport Intelligence Économique Et Stratégies Des Entreprises.Document31 pagesLe Rapport Intelligence Économique Et Stratégies Des Entreprises.mohammedi asmaaPas encore d'évaluation
- Place Du Comité Technique de Stérilisation Dans La Promotion de L'activité de Stérilisation en TunisieDocument34 pagesPlace Du Comité Technique de Stérilisation Dans La Promotion de L'activité de Stérilisation en TunisieFatima VessaliusPas encore d'évaluation
- Créer CVPaw, Choisir Université, Trouver Emploi, Stage, Séminaire, Opportunités JobPaw - Com-1Document7 pagesCréer CVPaw, Choisir Université, Trouver Emploi, Stage, Séminaire, Opportunités JobPaw - Com-1Stael ToussaintPas encore d'évaluation