Vous aimerez peut-être aussi
- Vision stéréo par ordinateur: Explorer la perception de la profondeur dans la vision par ordinateurD'EverandVision stéréo par ordinateur: Explorer la perception de la profondeur dans la vision par ordinateurPas encore d'évaluation
- Diffusion anisotrope: Améliorer l'analyse d'images grâce à la diffusion anisotropeD'EverandDiffusion anisotrope: Améliorer l'analyse d'images grâce à la diffusion anisotropePas encore d'évaluation
- Examen-MID514 2021-2022 CorrigéDocument3 pagesExamen-MID514 2021-2022 CorrigéYoucef El MoslimPas encore d'évaluation
- TP Poutres SolidworksDocument12 pagesTP Poutres SolidworkswatsopPas encore d'évaluation
- 3-1 - Modelisation SystemesDocument24 pages3-1 - Modelisation SystemesYassine LakhalPas encore d'évaluation
- Segmentation PDFDocument23 pagesSegmentation PDFHayet TouatiPas encore d'évaluation
- Partie2.d.5 Comprendre Et Analyser Les Pics Cas Du BetonDocument21 pagesPartie2.d.5 Comprendre Et Analyser Les Pics Cas Du BetonABDRAMANE DEMBELEPas encore d'évaluation
- 2.ex02 Poutre IsoléeDocument14 pages2.ex02 Poutre IsoléeMohammed BENNOUNPas encore d'évaluation
- Code - Aster: Conditions de Liaison de Corps SolideDocument11 pagesCode - Aster: Conditions de Liaison de Corps SolideFongho Eric SinclairPas encore d'évaluation
- TP Simulation CFM5Document11 pagesTP Simulation CFM5Kamel Bousnina0% (1)
- TP3 Variation MethodDocument17 pagesTP3 Variation MethodGhilass SahkiPas encore d'évaluation
- MEF Chap1 Calcul MatricielDocument33 pagesMEF Chap1 Calcul MatricielMohamed SelmiPas encore d'évaluation
- Utt - Rapport Ma13 - Abaqus PDFDocument19 pagesUtt - Rapport Ma13 - Abaqus PDFLeksir KamiliaPas encore d'évaluation
- Robot Charges Dalle Vers PoutreDocument15 pagesRobot Charges Dalle Vers Poutresaidwajdi100% (1)
- Séance 7Document45 pagesSéance 7Laaouissi AzedPas encore d'évaluation
- Cours 10 - Mec423Document12 pagesCours 10 - Mec423bastien.dearburn1Pas encore d'évaluation
- Methode NumeriqueDocument14 pagesMethode NumeriqueMichelSagnoPas encore d'évaluation
- TP CFDDocument7 pagesTP CFDRyad GuiraPas encore d'évaluation
- Chap 4Document28 pagesChap 4fouad bouzahrPas encore d'évaluation
- Cours Elkaim Cge2020Document63 pagesCours Elkaim Cge2020lePas encore d'évaluation
- Chapitre 2 - Feature - Based - Image - MatchingDocument49 pagesChapitre 2 - Feature - Based - Image - MatchingBouarfa AmalPas encore d'évaluation
- C2 Modélisation SurfaciqueDocument11 pagesC2 Modélisation Surfaciquemezyan reggaiPas encore d'évaluation
- Compte Rendue TP1-flècheDocument20 pagesCompte Rendue TP1-flècheKAOUTAR EL HARRAKPas encore d'évaluation
- Poly Segmentation ENSTA BaillieDocument42 pagesPoly Segmentation ENSTA BaillieMariem CheikhrouhouPas encore d'évaluation
- Chapitre 4Document41 pagesChapitre 4jennane ikramPas encore d'évaluation
- Support de Cours 3 - FractaleDocument8 pagesSupport de Cours 3 - FractaleYùš Rą Màhjõùß100% (1)
- RDM2 Chapitre5 2020 2021Document46 pagesRDM2 Chapitre5 2020 2021Chorouk TabliouaPas encore d'évaluation
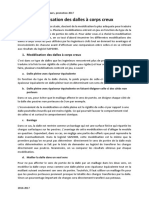
- Modélisation Des Dalles À Corps CreuxDocument4 pagesModélisation Des Dalles À Corps CreuxNourreddine HabibPas encore d'évaluation
- Chapitre 2Document12 pagesChapitre 2housniredouane83Pas encore d'évaluation
- TP Focometrie CorrectionDocument8 pagesTP Focometrie CorrectionSaraEA100% (2)
- CR Portique SDMO CorrigeDocument8 pagesCR Portique SDMO CorrigeMPas encore d'évaluation
- TexturesDocument77 pagesTexturesamirPas encore d'évaluation
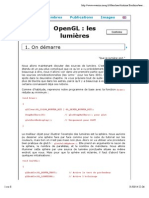
- OpenGL: Les Lumières PDFDocument8 pagesOpenGL: Les Lumières PDFVladimir ZaltPas encore d'évaluation
- A2017 Traitement Images Partie 2 Page WebDocument84 pagesA2017 Traitement Images Partie 2 Page WebAnes KebbabPas encore d'évaluation
- Cours 8Document41 pagesCours 8Mamoudou Bah DialloPas encore d'évaluation
- ROBOT Millennium - Convention de Signes Pour Les Éléments FinisDocument3 pagesROBOT Millennium - Convention de Signes Pour Les Éléments FinisEL HABIB MOHAMEDPas encore d'évaluation
- Elements FinisDocument15 pagesElements FinisYounesHamoudiPas encore d'évaluation
- TP l3pprsDocument6 pagesTP l3pprslolobsPas encore d'évaluation
- Code - Aster: Dualisation Des Conditions Aux LimitesDocument30 pagesCode - Aster: Dualisation Des Conditions Aux LimitesFongho Eric SinclairPas encore d'évaluation
- C0 Géométrie de Construction de SolidesDocument6 pagesC0 Géométrie de Construction de Solidesmezyan reggaiPas encore d'évaluation
- Compte Rendu Traitement D'imageDocument18 pagesCompte Rendu Traitement D'imagezineb1el1attar1sofiPas encore d'évaluation
- Vray Indirect Illumination - ApeiNe - Vray PDFDocument5 pagesVray Indirect Illumination - ApeiNe - Vray PDFModjo julien ronaldPas encore d'évaluation
- TP2 SimulationDocument7 pagesTP2 SimulationKamel BousninaPas encore d'évaluation
- Transcript of Arche PlaqueDocument6 pagesTranscript of Arche PlaqueAkimBiPas encore d'évaluation
- David NOËL - DM de Statique Graphique Et Analytique - Pelleteuse PDFDocument4 pagesDavid NOËL - DM de Statique Graphique Et Analytique - Pelleteuse PDFSmith FrankPas encore d'évaluation
- 87 DMS B2 EF2 ReyDocument52 pages87 DMS B2 EF2 ReyLionel TebonPas encore d'évaluation
- Modeles 1D, 2D Ou 3DDocument7 pagesModeles 1D, 2D Ou 3DsemvpmPas encore d'évaluation
- TD1 Calcul Des Impédances (1562)Document7 pagesTD1 Calcul Des Impédances (1562)Ridha KasriPas encore d'évaluation
- Em24 FRDocument28 pagesEm24 FRAline NgankamPas encore d'évaluation
- Cours FiltrageDocument13 pagesCours FiltrageDjalel HemidiPas encore d'évaluation
- 012 Ray TracingDocument23 pages012 Ray TracingJalilPas encore d'évaluation
- Projet Robot StructureDocument15 pagesProjet Robot StructureCao Tú HoàngPas encore d'évaluation
- Simulations EntretoiseDocument11 pagesSimulations EntretoiseNader Farhat100% (1)
- Covadis 2000-7 PlateformeDocument41 pagesCovadis 2000-7 PlateformeValéry Mbra100% (12)
- Chaptre 4 Vision Artificielle M2 ESE 2022Document59 pagesChaptre 4 Vision Artificielle M2 ESE 2022mustapha skanderPas encore d'évaluation
- Chapitre 1 - Séminaire D'ouverture Scientifique - Compression Des Données VisuellesDocument39 pagesChapitre 1 - Séminaire D'ouverture Scientifique - Compression Des Données VisuellesRidha MezziPas encore d'évaluation
- CoursDocument12 pagesCoursayoub benaliPas encore d'évaluation
- 01 Pipeline GraphiqueDocument29 pages01 Pipeline GraphiqueTorkia HadjazPas encore d'évaluation
- Plan Du Module de Modélisation Des AM Et Statique Du SolideDocument6 pagesPlan Du Module de Modélisation Des AM Et Statique Du SolidegredelfarellangouPas encore d'évaluation
- Poo Chap 2 Classes-Et-Objets1Document23 pagesPoo Chap 2 Classes-Et-Objets1Bouarfa AmalPas encore d'évaluation
- Poo Chap 3 Hc3a9ritage Polymorphisme Abstraction3Document34 pagesPoo Chap 3 Hc3a9ritage Polymorphisme Abstraction3Bouarfa AmalPas encore d'évaluation
- Chapitre 4 - Structure From MotionDocument35 pagesChapitre 4 - Structure From MotionBouarfa AmalPas encore d'évaluation
- Chapitre 3 - MotionDocument76 pagesChapitre 3 - MotionBouarfa AmalPas encore d'évaluation
- Chapitre 2 - Feature - Based - Image - MatchingDocument49 pagesChapitre 2 - Feature - Based - Image - MatchingBouarfa AmalPas encore d'évaluation
- Chapitre 1 - Localisation Des FeaturesDocument76 pagesChapitre 1 - Localisation Des FeaturesBouarfa AmalPas encore d'évaluation
- RI SlidesDocument59 pagesRI SlidesBouarfa AmalPas encore d'évaluation
- COURS Éthique DéontologiqueDocument86 pagesCOURS Éthique DéontologiqueBouarfa AmalPas encore d'évaluation
- Recherche Dinformations MultilingueDocument15 pagesRecherche Dinformations MultilingueBouarfa AmalPas encore d'évaluation
- CorrigerDocument2 pagesCorrigerBouarfa AmalPas encore d'évaluation
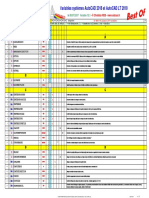
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESDocument7 pagesVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazePas encore d'évaluation
- Bascules SynchronesDocument7 pagesBascules SynchronesMohamed Ben FredjPas encore d'évaluation
- TD N°2 Maths 3emeDocument5 pagesTD N°2 Maths 3emebilly kanaPas encore d'évaluation
- cm2 Exercices SymetrieDocument4 pagescm2 Exercices Symetriegjx7qcfwmyPas encore d'évaluation
- Formulaire SUP SuitesDocument2 pagesFormulaire SUP Suiteshala shooowPas encore d'évaluation
- Mem Corr AndriantavyDocument66 pagesMem Corr AndriantavyWael TrabelsiPas encore d'évaluation
- Beer - Méthode de Clarinette (1891)Document60 pagesBeer - Méthode de Clarinette (1891)fabri21Pas encore d'évaluation
- TP 2 InstrumentationDocument6 pagesTP 2 Instrumentationrami kafiPas encore d'évaluation
- LC 22-001Document7 pagesLC 22-001Simon Houde100% (2)
- ParetoDocument13 pagesParetoIkram El GhazouaniPas encore d'évaluation
- Alimentations StatiquesDocument16 pagesAlimentations StatiquesKdr Khair-Eddine100% (1)
- Cours Matlab 2020Document55 pagesCours Matlab 2020soufianealjahid523Pas encore d'évaluation
- Remerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonDocument42 pagesRemerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonOMAE01Pas encore d'évaluation
- NPS - VPN Sous Windows2012 ServerDocument19 pagesNPS - VPN Sous Windows2012 ServerAKUEPas encore d'évaluation
- TP E P RedresseurDocument5 pagesTP E P RedresseurRafik BouhennachePas encore d'évaluation
- Enrobage EC2Document7 pagesEnrobage EC2Abdelkader Drr100% (1)
- PLE CoursDocument95 pagesPLE CoursFranck-Olivier KassouPas encore d'évaluation
- Composition de 3ètrim MathsDocument2 pagesComposition de 3ètrim Mathsnaababaongo052Pas encore d'évaluation
- Cours Probabilités (Chapitre 1 - Analyse Combinatoire)Document41 pagesCours Probabilités (Chapitre 1 - Analyse Combinatoire)Khadija Dia100% (1)
- SALOMÉ Test Management FrameworkDocument101 pagesSALOMÉ Test Management FrameworkPharell William BaldorPas encore d'évaluation
- Travaux Dirigés - TD - ArbresDocument2 pagesTravaux Dirigés - TD - Arbresلا إلٰه إلّا اللهPas encore d'évaluation
- Matematica În Egipul Antic FR 3Document3 pagesMatematica În Egipul Antic FR 3Valeriu TurcanuPas encore d'évaluation
- TD1 CorDocument9 pagesTD1 Coramine jodar100% (1)
- Macro ImportDocument29 pagesMacro ImportKamil ChamPas encore d'évaluation
- MEMOIRE Samer MoussaDocument94 pagesMEMOIRE Samer Moussatoni JabbourPas encore d'évaluation
- Techniques de ClimatisationDocument27 pagesTechniques de ClimatisationMohamud Lhaf100% (1)
- TP BDV 2016Document17 pagesTP BDV 2016Khabtane AbdelhamidPas encore d'évaluation
- CCNA 02 Introduction À l'IOSDocument138 pagesCCNA 02 Introduction À l'IOSyikhlefPas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- Ifr AttDocument9 pagesIfr AttpatrouilledeafrancePas encore d'évaluation