Académique Documents
Professionnel Documents
Culture Documents
BTS Cira
Transféré par
bourgnonTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
BTS Cira
Transféré par
bourgnonDroits d'auteur :
Formats disponibles
TS2 CIRA Régulation - Chap I.
Rappels
CHAP I. RAPPELS
1. Le schéma TI .................................................................................................................................. 2
2. Le schéma fonctionnel ou schéma bloc ......................................................................................... 4
3. Les nombres complexes ................................................................................................................. 5
3.1. Présentation ............................................................................................................................. 5
3.2. Plan complexe ......................................................................................................................... 5
3.3. Module et argument ................................................................................................................ 5
3.4. Propriétés ................................................................................................................................ 6
4. Les différentes transformées .......................................................................................................... 6
5. La transformée de Laplace ............................................................................................................. 6
5.1. Linéarité .................................................................................................................................. 6
5.2. Limites .................................................................................................................................... 6
5.3. Table des transformées ............................................................................................................ 7
5.4. Le Pic de Dirac ........................................................................................................................ 7
5.5. L’échelon ................................................................................................................................. 8
6. Structures des régulateurs PID ....................................................................................................... 8
6.1. Composition ............................................................................................................................ 8
6.2. Correction proportionnelle ...................................................................................................... 8
6.3. Correction intégrale ................................................................................................................. 8
6.4. Correction dérivée ................................................................................................................... 8
6.5. Structures PID ......................................................................................................................... 9
6.6. Déterminer la structure interne d'un régulateur ...................................................................... 9
7. De la boucle ouverte à la boucle fermée ...................................................................................... 10
7.1. Notations ............................................................................................................................... 10
7.2. Calcul de T(p) ....................................................................................................................... 10
7.3. Calcul de F(p) ........................................................................................................................ 11
7.4. Calcul de !(p) ........................................................................................................................ 11
2009-2010 page 1/11 http://btscira.perso.sfr.fr
Cours de régulation - TS2 CIRA Chap I. Rappels
1. Le schéma TI
La norme NF E 04-203 définit la représentation symbolique des régulations, mesures et
automatisme des processus industriels. Les instruments utilisés sont représentés par des cercles
entourant des lettres définissant la grandeur physique réglée et leur (s) fonction (s). La première
lettre définie la grandeur physique réglée, les suivantes la fonction des instruments.
Grandeurs réglées
Régulateur
Transmetteur
Indicateur
de PT TIC de
Pression
Température
Fonctions
Les parcours de l’information est matérialisé par une flèche dont l’allure dépend du support de
l’information.
Transmetteur Régulateur
de de
Pression Pression
PT PC
Mesure
de
Pression
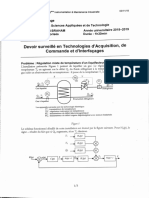
Cette instrumentation est placée sur un schéma représentant la tuyauterie et les principaux éléments
de l’installation. Ci-dessous une régulation de niveau dans le ballon avec correction de tendance.
Surchauffeur
F
FT V
LA Turbine
1
H B
A
L L
LT
C
L
P
O + T
Condenseur
N L
Y
FT
2
LA
L
2009-2010 page 2/11 http://btscira.perso.sfr.fr
Régulation TSTL Chap. II : Schémas
Régulation TSTL Chap. II : Schémas
Régulation
TS2 CIRA TSTL Régulation -Chap.
Chap III. :Rappels
Schémas
TSTL ANNEXE 1
Cours de régulation
TSTL
Les Cours de régulation
TSTLprincipales lettres utilisées :
TABLEAU DES CODETSANNEXE 1
D'IDENTIFICATION DEVANT ETRE CONNUS
ANNEXE 1 DEVANT ETRE CONNUS
TABLEAU DES CODETS D'IDENTIFICATION
Cours de régulation
1 TABLEAU DES CODETS 2 D'IDENTIFICATION DEVANT3ETRE CONNUS 4 5
1 mesurée
Variable 2
Premier élément 3 Fonction 4
Dispositif réglant 5Signalisation
1
Variable mesurée 2
Premier élément Fonction 3 Dispositif 4réglant 5
Signalisation
1.1 1.2 1.3 2.1 2.2 2.3 2.4 3.1 3.2 3.3 4.1 4.2 4.3 5.1 5.2
Variable mesurée
1.1 1.2Initiale1.3Modifi- 2.1 Premier élément Fonction 3.3 Dispositif réglant Signalisation
Signification Elé ment 2.2Indica- 2.3Trans- 2.4Enregis-3.1Régula-3.2 Commu- Relais4.1 Organe 4.2 Acti 4.3 Autono-
o n- 5.1 Lampe 5.2 Ala rme
1.1
Signification 1.2
Initiale Modi 1.3
fcateur 2.1
i- Elé ment Indic2.2
primaire a-
teur Trans-2.3 2.4
Enregis-
metteur 3.1
treur Régula-tio n Commu- 3.2 n 3.3
tatio Relais Organe
divers 4.1de Actio n-
4.2neur 4.3meLampe
Autono- 5.1témoin
Ala rme5.2
Signification Initiale cateur
Modifi- primaire teur
Capteur
Elé ment Indica- metteur
Trans- treur Impri- tioRégula-
Enregis- n tatiCommu-
o n Contacts
divRelais
ers et dedeOrgane neur
régla Actio n- meAutono- témoin
ge Lampe Ala rme
Capteur
cateur primaire teur metteurImpri-
treurmante tio n Contacts et de
tatio n régla ge
diverscalculde neur me témoin
A à Z D FCapteurE I Tmante
Impri- R C ContactsHcalcul
et de
(H) Yrégla ge V Z CV H H (H)
AàZ D F Q E I T R
mante C H (H) Y
S M calcul V Z CV H (H) H (H)A M
AàZ Q DF E I T R C S MH (H)L (L) Y V Z CV (H) H L AMM H (H) L (L)
Q SL M(L) L (H)M LAL(L)(L)
M
Tension E EI L (L) LL (L)
M L (L)
Tension E EI L (L)
Electrique
Electrique
Tension E F
Débit
Débit F FF
FF FE FE FIEI FI FT FT FR FR FC FICFC FIC FSHH
FSHHFY
FY FV FV FZ FZ FCV FCV FLHH
FLHH
FAHH
FAHH
Electrique
FQ FQ FFI FFI FIT FIT FFR FFR FFC FFCFSH FSHFFY FFY FFV FFVFFZ FFZ FFLHH FFLHH FFAHH FFAHH
Débit F FF FE FI FT FR FC FIC FSHH FY FV FZ FCV FLHH FAHH
FQI FQI FFT FFT FQR FQR FRC FRCFSM FSM FQLHH FQLHH FQAHH FQAHH
FQ FFI FIT FFR FFC FSH FFY FFV FFZ FFLHH FFAHH
FQT FQT FFIC FFICFSL FSL FLH FLHFAH FAH
FQI FFT FQR FRC FSM FQLHH FQAHH
FFIT..FFIT.. FFRC FFRC FSLL FSLL FFLH... FFLH...
FFAH.. FFAH..
Courant I I FQT FFIC FSL FLH FAH
Courant I I IAHH IAHH
électrique FFIT.. FFRC FSLL FFLH... FFAH..
électrique IAH.. IAH..
Courant
Action
Action humaine HI H
humaine
I HC,HICHC,HIC
IAHH
électrique
Niveau IAH..
Niveau L L LE LE LI LI LT,LITLT,LIT LR LR LC LC LSHH LSHH LY LY LV LV LZ LZ LCV LCV LLHH LLHH LAHH LAHH
Action humaine H HC,HIC
LIC LIC LSH LSH LLH LLHLAH LAH
Niveau L LE LI LT,LIT LR LC LRCLSM..
LRC LSHH LSM..LY LV LZ LCV LLM..LLHHLLM..LAM..LAHHLAM..
Pression
Pression P PPD PD PE PE PI PI PT PT PR PR PCLIC PC PSHH LSH PSHH PY PY PV PV PZ PZ PCV PCV LLH PLHH
PLHH PAHH LAH PAHH
PDI PDI PDT PDT PDR PDR PIC LRCPIC PDSHH
LSM.. PDSHH
PDY PDY PDV PDV PDZ PDZ PDCV PDCV LLM..PDLHH
PDLHH PDAHHLAM..PDAHH
Pression P PD PE PI PT PR PC PDC...PSHH
PDC ... PY PV PZ PCV PSV
PSV PLHPLHHPLH PAH PAHHPAH
PDI PDT PDR PIC PDIC PDSHH PDY
PDIC PDV PDZ PDCV ....PDLHH ....... PDAHH ...
Température
Température T T TE TE TI TI TT TT TR TR TCPDCTC TSHH ... TSHH TY TY TV TV TZ PSV TCV
TZ TCV PLH TLHH
TLHH TAHH PAH TAHH
TIT TIT PDICTIC TSH... TSH...
TIC .... TLH..
TLH.. TAH..... TAH..
Température T TE TI TT TR TC TSHH TY TV TZ TCV TLHH TAHH
Modificateur 1.3 D : différentiel TITF : fraction (rapport)
TIC TSH... TLH..
Q : quantité (totalisateur, intégrateur, compteur) TAH..
Modificateur 1.3 D : différentiel F : fraction (rapport) Q : quantité (totalisateur, intégrateur, compteur)
Commutation
Commutation
Modificateur 1.3 1.3
1.3 Lampe
D Lampetémoin
témoin
: différentiel 5.1 et
5.1Alarme
F : 5.2
et Alarme peuvent comporter
5.2 (rapport)
fraction peuvent un
Q qualificatif:
comporter un qualificatif:
: quantité (totalisateur, intégrateur, compteur)
HH HH
: très hauthaut
: très H : haut
H : haut M : milieu (intermédiaire)
M : milieu (intermédiaire) L : basL : bas LL : très
LLbas
: très bas
Commutation 1.3 Lampe témoin 5.1 et Alarme 5.2 peuvent comporter un qualificatif:
HH : très haut H : haut M : milieu (intermédiaire) L : bas LL : très bas
Les principaux symboles utilisées :
Septembre 98 98
Septembre Page 27 / 31 27 / 31
Page
Septembre 98 Page 27 / 31
2009-2010 Page 10 sur 44
2009-2010 Page 10 sur 44
2009-2010 Page 10 sur 44
2
2
2009-2010 page 3/11 2 http://btscira.perso.sfr.fr
Cours de régulation - TS2 CIRA Chap I. Rappels
2. Le schéma fonctionnel ou schéma bloc
Le schéma fonctionnel tente de représenter les relations entre les différentes grandeurs physiques
des boucles de régulation. Il sera composé uniquement des éléments suivants :
• Des lignes de parcours d'une grandeur physique. Ces ligne représente le parcours d'une
grandeur physique de la boucle de régulation :
Grandeur physique
• Des blocs qui représentent un ou plusieurs éléments de la chaîne de régulation qui assure la
relation entre deux grandeurs physiques, relation caractérisée par la fonction de transfert. La
fonction de transfert permet pour tous types de signaux d’avoir la relation ! suivante :
s=H"e
e s
H
• Les sommateur ou comparateurs, qui permettent l’addition ou la soustraction de grandeurs
physiques
même nature. :
E2 E2
E1 + S= E1 + E2 - S= E1 - E2
E1
+ +
2009-2010 page 4/11 http://btscira.perso.sfr.fr
TS2 CIRA Régulation - Chap I. Rappels
À partir d’un schéma TI, on peut construire le schéma fonctionnel correspondant.
Exemple, une régulation de pression :
"
& % $ Qs
PI X Y
PT Qe
C ) W C H1 H2
' #
! & ( !
)W Y ' # "
Qe Qs R
X
( % $
Schéma TI Schéma Fonctionnel
3. Les nombres complexes
3.1. Présentation
j est le nombre imaginaire tel que j2 = -1.
Tout nombre complexe z peut se décomposer de façon unique comme la somme d’un nombre réel
et d’un nombre imaginaire.
z = a+jb ; avec a la partie réelle et b la partie imaginaire. a et b sont des nombre réels.
3.2. Plan complexe
Dans la mesure où un nombre complexe se décompose en deux parties, on le représente sur le plan
complexe, avec a comme ordonné et b comme abscisse :
b z
j
0 1 a
-1
-j
3.3. Module et argument
Le nombre complexe z = a+jb peut s’écrire sous la forme z = |z|. ejArg(z), avec |z| le
module de z et Arg(z) l’argument de z. Sur le plan complexe :
z
|z| �
Arg(z) |z| = a 2 + b2
b
Arg(z) = atan( )
a
2009-2010 page 5/11 http://btscira.perso.sfr.fr
Cours de régulation - TS2 CIRA Chap I. Rappels
3.4. Propriétés
1/j= -j ; Arg(z ! z’) = Arg(z) ! Arg(z’) ; |z ! z’| = |z| ! |z’| ;
|ej!| = 1 ; Arg(1/z) = -Arg(z) ; |1/z| = 1/|z| ;
4. Les différentes transformées
Pour avoir la relation ! écrite paragraphe 2 pour chacun des types de signaux que l’on rencontre,
on a ‘inventé’ des transformées différentes :
• Pour les signaux sinusoïdaux ; les nombres complexes ;
• Pour les signaux causaux ; la transformée de Laplace ;
• Pour les signaux périodiques : la transformée de Fourrier ;
• Pour les signaux numériques : la transformée en Z.
Pour la régulation, partant du fait qu’au ‘début’ toutes les grandeurs physiques sont à 0 (ou
presque), on utilise la transformée de Laplace. On remarquera que toutes ces représentations
utilisent des nombres complexes.
5. La transformée de Laplace
5.1. Linéarité
L [f (t) + g(t)] = L [f (t)] + L [g(t)]
L [a × f (t)] = a × L [f (t)]
L [f � (t)] = p × L [f (t)]
�
L [f (t)]
L [ f (t)] =
p
5.2. Limites
Valeur initiale : lim f (t) = lim p.L [f (t)]
t→0+ p→∞
Valeur finale : lim f (t) = lim p.L [f (t)]
t→∞ p→0
2009-2010 page 6/11 http://btscira.perso.sfr.fr
Table des transformées
Fonction Allure f(t), (a, b) � R, n � N L [f (t)]
3BTS Table
BTS CIRA
CIRA des Fonction
transformées
Dirac Allure f(t), (a, b b)× � R,
δ(t) n � N
Autre
Autre L [fsur
regard
regard (t)]
bsurla Régulation
la Régulation
3 BTS TableCIRA des transformées Autre regard sur la Régulation
TS2 CIRA Fonction
Dirac Allure f(t), (a,bb)×�δ(t) R, n � N Régulation - Chap
L [f (t)] I. Rappels
Fonction
Table
Dirac
5.3.deséchelon des transforméesAllure f(t), (a, b)
bb× � R,
δ(t) n � N L [fb(t)] bb
1.3.3 Table transformées × u(t)
1.3.31.3.3 Table
Tabledes destransformées
transformées
Dirac
Fonction Allure f(t),f(a, b)b(a, �× R,b)
δ(t)
n� �R,N n �L [f (t)] Lb[f bp
échelon
Fonction
Fonction
Fonction
Dirac Allure
Allure f(t),
f(t), (t),
(a,
(a, b) b) b� �×
R,R,
b × δ(t) u(t)
n n� �N N L NL[f [f
(t)] (t)] bpb(t)]
échelon b × u(t)
rampe
Dirac Dirac b ×b × b×
δ(t) t × δ(t)
u(t) b b bp b
échelon
Dirac
Dirac bb×× ×
bδ(t)
δ(t)u(t) b b bb p2
échelon
rampe b ×
b × t × u(t) u(t) p
×× b t××u(t)
b
b b ppbb2
rampe
Échelon échelon
échelon
échelon
b b
bb××u(t)
u(t)
u(t)
u(t) p b pp2 n!
n
puissance
rampe bb××t t× ×
u(t)u(t) p p b b2×
rampe
Rampe
puissance bb× ×
b× tn×
t t× ×u(t)
u(t)
u(t) bb b × p 2b n! pn+1
rampe b × t × u(t) b p 2
p n+1 n!
puissance rampe
rampe bb×× bt× t××tu(t)
nu(t)
× u(t) pp22 2 b × p
n−atn p n!pn!bn+1
puissance
Puissance
exponentielle b
b ×b
× ×te t× ×u(t)
× u(t)
u(t) b ×
b × n!
puissance
puissance bb × b× tt×
n
n×
n
t−at ××u(t)
u(t) bb × n!bn!× ppbpn+1
n! n+1n+1
+a
exponentielle
puissance
puissance ×b
b×t × e
n× u(t)
u(t) u(t) ×b × ppn+1n+1p p
n+1 b
b
exponentielle
Exponentielle b b××e−at −at
e−at× ×u(t)u(t) p b a +
exponentielle b ×−at e −at × u(t) bb ppb+ +aa
exponentielle bb ××b ee× −at × u(t) p + a a
× aa bbpb +
exponentielle
exponentielle e × u(t) u(t) b
premier exponentielle
ordre b b× × (1 e−at−×eu(t) −at
) × u(t)pp ++ × aa
premier
Premier ordre ordre b× b ×(1(1−−ee−at −at
))××u(t)
u(t) p + ap× × p+a
−at ppb × ppa+ +aaa
premier ordre b × (1 −at − e−at ) × u(t)b b
a
premierpremier ordre
ordre b×b× (1 (1− e−−at e) −at ) × u(t) ×
× u(t) b p× paω+ a
××p 2+ωaω2
b a
premier
Sinus ordre
premier
sinus ordre b b×× (1(1b−× b −
e× esin(ωt) × u(t)
) ×)u(t)
sin(ωt).u(t) p × p+ pbab×
sinus b × sin(ωt) p bpp × + app p+ +
2a ω ω2
ω p2ω+ω+ ω2
sinus sinus b ×bsin(ωt)
b× × sin(ωt) b × 2 bω× 2ωp
sinus b b× sin(ωt) p b+×ω× 2
22p+ + ω22
Cosinus
sinussinus
b×× sin(ωt) b × pb2b×
sin(ωt)
cos(ωt).u(t) p ω
p ω22p
b ω×p2 +
+ 2
cosinus
cosinus bb××cos(ωt) cos(ωt) pb ×p 2+ 2 ω 2
cosinus b × cos(ωt) b × 2 p2 p pp+p+ ω 2ω
cosinus cosinus
cosinus b× bb× ×cos(ωt)
cos(ωt) b × b ×
cos(ωt) p + b×
ω ω
eb−at 2 + ω22p2p+2ω 2
Sinuscosinus
amortie ×sin(ωt).u(t)
cos(ωt) pb(p ×+p a) +2 ω + ω2
p2 + ω 2
Représentations
Représentations
1.4 Représentations harmoniques
harmoniques
harmoniques p+a
1.4 Représentations
Cosinus amortie harmoniques e −at
cos(ωt).u(t)
Représentations
avoir
voir Représentations
Pour
Pourune
une
avoir
avoir une
une représentation
représentation
représentation
représentation
harmoniques
harmoniques
harmonique
harmonique d’une
harmonique
harmonique d’une
d’une
d’une
fonction
fonction
fonction
fonction
de
de transfert
transfert
de
de
ou
ou d’un
transfert
transfertd’unou (pd’un
signal
signal
ou +d’un dont
a)
dont 2 +on on
signal ω 2connaı̂t
signalconnaı̂t
dont la
laon oc
dont
PourReprésentations
transformée
avoir unede Laplace,
représentation il harmoniques
suffit de remplacer
harmonique p,
d’une par jω.
fonction ω lade pulsation
transfert
transformée de Laplace, il suffit de remplacer p, par jω. ω la pulsation du signal et j l’unité complexe. duousignal
d’un et j
signal l’unitédont complexe.
on connaı̂t la
ormée
rmée
avoir dede Laplace,
Laplace, ilil suffit
suffit de
de remplacer
remplacer p,
p, par
par jω.
jω. ωω lala pulsation
pulsation du du signal
signal et j
et l’unité
j l’unitécomc
Un une
r transformée
avoir
Un une
des
des représentation
représentation
avantages des
de Laplace,
avantages
5.4. des
Le
il suffitharmonique
harmonique
représentations
de remplacer
représentations
Pic de Dirac
d’une
d’une
harmoniques, fonction
p, parfonction
harmoniques, c’est
jω. de
c’est ω la
de dedetransfert
transformertransfert
pulsation
transformer un ououd’un
duproduit
un signal
produit d’un
de signal
de jsignaux
et signal
l’unité
signaux dont
en
en donton on
somme
complexe.
somme con
es avoir une
avantages
de courbes. représentation
desreprésentations
représentations harmonique d’une
harmoniques, fonction
c’est de de transfert
lalatransformer ou un d’un
produit signal j de dont on
signaux co
e
avantages
sformée
ormée
Un dedes de des
deLaplace,
Laplace,
avantages
courbes. des ilsuffit
suffit de
ilreprésentations harmoniques,
de remplacer
remplacer p,
p, par
harmoniques, par c’estc’est
jω.
jω.deωω de transformer
pulsation
pulsation
transformer undu du
produit un
signal
signalproduit
deet et
signaux j de ensignau
l’unité comp
l’unité
somme com
sformée
urbes.
desdeavantages de Laplace,
courbes.
avantages Pour
desles il suffit
besoins
représentations de remplacer
du formalisme p, par
quantique,
harmoniques, Paulc’est jω. ω
Adrien de latransformer
Mauricepulsation du signal et de j l’unité comp
sbes. des représentations harmoniques, c’est de transformerununproduit produit de signaux
signaux en
des
ourbes.avantages
1.4.1 des
Dirac
Lieux deareprésentations
1.4.1 Lieux de Nyquiest
introduit
Nyquiest harmoniques,
un objet singulier, qu'on appelle c’est de
aujourd'huitransformer un produit de signaux en
urbes. impulsion de Dirac ou masse de Dirac, notée "(t). Cette
ourbes.
1.4.1On seLieux
Lieux deavec
deimpulsion
retrouve Nyquiest
Nyquiest la représentation
LieuxOn se retrouve
de avec représente
Nyquiest un signal complexe
la représentation complexe
classique. Ennulle
de durée théoriquement
classique. En abscisse
abscisse
et la partie réelle et en ordonnée la
la partie réelle et en ordonnée la
partie imaginaire.
avecElle
d'énergie finie aetpeut d’intérêt.
qui vérifie : complexe classique. En abscisse la partie réelle et en ordonnée la
1On Lieux
Lieux de
se retrouve
partie Nyquiest
imaginaire.
de Nyquiest la représentation
Elle a peut d’intérêt.
�
retrouve
1partie Lieux avec la
de Nyquiest
imaginaire.
représentation ∞ complexe classique. En abscisse la partie réelle et en ord
retrouve avec laElle a peut d’intérêt.complexe classique. En abscisse la partie réelle et en
représentation δ(t)dt = 1 classique. En abscisse la partie réelle et en ordo
imaginaire.
seretrouve
retrouveavec Elle
avec lalaareprésentation
peut d’intérêt.
représentation complexe
complexe classique. En En abscisse
abscisselalapartie partieréelle réelleetetenenordo or
maginaire.
e retrouve Elle
avec a peut d’intérêt.
la areprésentation 0 complexe classique.
ie imaginaire. Elle peut d’intérêt.
eimaginaire.
imaginaire. OnElle
Elle aapeut
a aussi :peut d’intérêt.
d’intérêt.
L (δ(t)) = 1
Paul Adrien Maurice Dirac
Dans le cas d'une fonction de transfert T, on remarque que si l'on prend e(t)="(t), on a s(p)=T(p).
On parle de réponse impulsionnelle.
2009-2010 page 7/11 http://btscira.perso.sfr.fr
Cours de régulation - TS2 CIRA Chap I. Rappels
Une entrée en pic de Dirac permet de connaître directement la
fonction de transfert d'un procédé.
L'impulsion de Dirac est l'élément neutre des transformées de
Laplace.
De manière générale il est assez difficile d'obtenir une impulsion de
Dirac, un signal de durée nulle avec une énergie finie. Dans les
recherches pétrolières on simule le signal de Dirac par une explosion.
Ce même signal a servi aussi à la modélisation des éclairs.
BTS CIRA Au
5.5. L’échelon
1.3.3 brusque
L'échelon u(t) est une variation Table des transformées
de valeur unitaire d'une grandeur physique. Il est plus
facile à obtenir que le pic de Dirac. Ce signal sera utilisé par
Fonction la plupartf(t),
Allure des(a,
méthodes
b) � R, n � N L
d'identification des fonctions de transfert.
Lorsque l’on soumet une fonction de transfert à un échelon,
Dirac on parle de réponse indicielle.b × δ(t)
1
L (u(t)) =
p échelon b × u(t)
6. Structures des régulateurs PID
rampe
w ! b × t × u(t)
6.1. Composition y
+ C(p)
Tout régulateur PID est constitué de deux éléments -
principaux :
puissance b × tn × u(t) b×
• Le comparateur ;
• Le correcteur C(p). x
exponentielle b × e−at × u(t)
p
Dans la plupart des cas, la commande y est calculée uniquement en fonction de l’erreur !.
6.2. Correction proportionnelle b
premier ordre b × (1 − e−at ) × u(t) ×
C’est un simple amplificateur : C(p) = A. p
6.3. Correction intégrale sinus b × sin(ωt) b×
1
Le correcteur s’écrit : C(p) =
Ti p
cosinus b × cos(ωt) b×
Ti est la constante de temps d’action intégrale et s’exprime en unité de temps.
6.4. Correction dérivée
1.4 Représentations harmoniques
Le correcteur s’écrit : C(p) = Td p
Pour avoir une représentation harmonique d’une fonction de transfert ou d’u
transformée
Td est la constante de temps de Laplace,
d’action dérivée il suffit
et s’exprime de remplacer
en unité de temps. p, par jω. ω la pulsation du sig
Un des avantages des représentations harmoniques, c’est de transformer un p
de courbes.
1.4.1 Lieux de Nyquiest
2009-2010 On se retrouve
pageavec
8/11 la représentation complexe classique. En abscisse la pa
http://btscira.perso.sfr.fr
partie imaginaire. Elle a peut d’intérêt.
TS2 CIRA Régulation - Chap I. Rappels
6.5. Structures PID
Le triplet, gain proportionnel A, temps intégral Ti et temps dérivé Td, définit trois structure qui
sont représentées sur les figures suivantes.
100
Xp
1
C(p) = A + + T d.p
Z Y
T i.p
1 +
E
Ti
+
+
1 + A.T i.p + T i.T d.p2
C(p) =
T i.p
d
Td
dt
Structure parallèle
1
Z Y C(p) = A(1 + + Td .p)
E 100 1 + Ti .p
+
Xp Ti +
1 + T i.p + T i.T d.p2
C(p) = A ×
d Ti .p
Td
dt
Structure mixte
1
C(p) = A(1 + )(1 + Td .p)
Ti .p
E Z Y 1 + T i.p
100 1 + d +
Xp
+ Td + C(p) = A × × (1 + T d.p)
Ti dt T i.p
Structure série
Remarque : Les régulateurs électroniques (tous ceux de la salle de travaux pratiques) ont une
structure mixte.
6.6. Déterminer la structure interne d'un régulateur
On observe la commande d’un régulateur en réponse à un échelon # d’erreur. La réponse Y est
alors composée de trois parties distincts :
• Un pic résultant de l’action dérivée ;
• Un échelon résultant de l’action proportionnelle ;
• Une rampe résultant de l’action intégrale.
t0
Action dérivé
Consigne
!
Mesure
Ti
Commande
!i Action intégrale
!p Action proportionnelle
2009-2010 page 9/11 http://btscira.perso.sfr.fr
Cours de régulation - TS2 CIRA Chap I. Rappels
La figure ci-avant montre les constructions nécessaires à la détermination de #p et #i, permettant
de déterminer la structure du régulateur. Le tableau suivant permet de connaître la valeur de ces
deux # en fonction de la structure du régulateur.
Structure !p !i
Mixte Kp"# Kp"#
Série Kp(1+Td/Ti)"# Kp"#
Parallèle Kp"# #
7. De la boucle ouverte à la boucle fermée
7.1. Notations
Dans la suite on représentera une boucle de régulation par le schéma bloc simplifié ci-contre.
w ! y x
+ C(p) H(p)
-
Correcteur Procédé
On trouve :
• La mesure x ;
• la consigne w ;
• la commande y ;
• l’erreur ! ;
• la fonction de transfert du correcteur du régulateur C ;
• la fonction de transfert du procédé H.
7.2. Calcul de T(p)
T(p) est la fonction de transfert en boucle ouverte.
Le schéma fonctionnel devient :
w ! x
+ T(p)
x = H(p) × y
-
y = C(p) × �
T (p) = C(p) × H(p)
2009-2010 page 10/11 http://btscira.perso.sfr.fr
TS2 CIRA Régulation - Chap I. Rappels
7.3. Calcul de F(p)
F(p) est la fonction de transfert en boucle fermée.
w x x
F(p) F (p) =
w
x = T (w − x)
x+T ×x=T ×w
x(1 + T ) = T × w T (p) 1
T ×w F (p) = =
x=
1+T
1 + T (p) 1 + 1/T (p)
T 1
F = =
1+T 1 + 1/T
7.4. Calcul de !(p)
�=w−x
x=T �
�=w−T ×� w(p)
� × (1 + T ) = w �(p) =
w
1 + T (p)
�=
1+T
2009-2010 page 11/11 http://btscira.perso.sfr.fr
Vous aimerez peut-être aussi
- Regulation CoursDocument106 pagesRegulation CoursRiadh Majd100% (4)
- R944C ProtocoleDocument8 pagesR944C ProtocoleNacer NacerPas encore d'évaluation
- Representation Symbolique de La RegulationDocument9 pagesRepresentation Symbolique de La RegulationNejmeddine Bannour67% (3)
- 9 Regulation-Cours PDFDocument106 pages9 Regulation-Cours PDFbali100% (1)
- AlimentationDocument43 pagesAlimentationELMIR ADIL100% (3)
- Regulation Cours PDFDocument106 pagesRegulation Cours PDFOmar RajhiPas encore d'évaluation
- Cours Incendie 5 Version A ImprimerDocument126 pagesCours Incendie 5 Version A ImprimerAfaf AzianePas encore d'évaluation
- Devoir de Synthèse Appareillage 2020-2021Document7 pagesDevoir de Synthèse Appareillage 2020-2021Heni DaoudPas encore d'évaluation
- Pid-Legend Sysboles PDFDocument1 pagePid-Legend Sysboles PDFAnnakimPas encore d'évaluation
- Examen 09 10 PDFDocument5 pagesExamen 09 10 PDFNoureddine GuersiPas encore d'évaluation
- Boucles 095504Document19 pagesBoucles 095504kader39Pas encore d'évaluation
- 2 SchemasDocument4 pages2 SchemasKAMILIPas encore d'évaluation
- Cours Régulation IndustrielleDocument47 pagesCours Régulation IndustrielleMarzakPas encore d'évaluation
- Lafp18 1Document4 pagesLafp18 1Ghebache OtakuPas encore d'évaluation
- Iri2 PDFDocument9 pagesIri2 PDFpedrii gonzalèsPas encore d'évaluation
- Instrumentation ElectroniqueDocument10 pagesInstrumentation Electroniqueaymen errejiouiPas encore d'évaluation
- DS 2018-2019Document3 pagesDS 2018-2019Emna SafraouiPas encore d'évaluation
- Tpe SAA BROIDADocument16 pagesTpe SAA BROIDADimitri Valdes TchuindjangPas encore d'évaluation
- TP Etude Dune CTN2Document2 pagesTP Etude Dune CTN2Çha ÏmaPas encore d'évaluation
- TP 1 - Capteur de Température: Nom Et Prénom: GroupeDocument4 pagesTP 1 - Capteur de Température: Nom Et Prénom: GroupeLoïc Fabien Nana NtainkehPas encore d'évaluation
- RegulationDocument5 pagesRegulationSi Mohamed RahiliPas encore d'évaluation
- Examen de Régulation Industrielle (2010-2011) - Durée - 2 HDocument5 pagesExamen de Régulation Industrielle (2010-2011) - Durée - 2 HAbdou KarimPas encore d'évaluation
- VQ040 CP6-1 Exercice QO HeDocument9 pagesVQ040 CP6-1 Exercice QO Heatif saadaouiPas encore d'évaluation
- Support Cours 2023 Part2 TimersDocument7 pagesSupport Cours 2023 Part2 Timersrayenkr03Pas encore d'évaluation
- Delta DoreDocument15 pagesDelta DorelanfypPas encore d'évaluation
- Listrik TesDocument494 pagesListrik TesDitya Agus100% (1)
- 14-15 Fiche Méthode N°1 - Doc SCH TIDocument3 pages14-15 Fiche Méthode N°1 - Doc SCH TIsosatlantiquePas encore d'évaluation
- Lab Gta 11 PDFDocument18 pagesLab Gta 11 PDFZaki TchakalPas encore d'évaluation
- Schéma Tuyauterie Et Instrumentation - WikipédiaDocument6 pagesSchéma Tuyauterie Et Instrumentation - WikipédiaArmand Muteb AmkPas encore d'évaluation
- EnergieDocument24 pagesEnergieJamila DebayaPas encore d'évaluation
- VQ040 CP5 Exercice QI AcDocument8 pagesVQ040 CP5 Exercice QI Acatif saadaouiPas encore d'évaluation
- Programmation Des API Part - 2Document18 pagesProgrammation Des API Part - 2sami bmPas encore d'évaluation
- DR Surveillance PressionDocument3 pagesDR Surveillance Pressioneric laliquePas encore d'évaluation
- 22-23 TS1 CRS2 - Transmit-InfoV1-articleDocument4 pages22-23 TS1 CRS2 - Transmit-InfoV1-articlelroy.persoPas encore d'évaluation
- Regulation de Temperature D'un FourDocument6 pagesRegulation de Temperature D'un FourbalfsahiPas encore d'évaluation
- 627 Documentation Bts Se 2010Document17 pages627 Documentation Bts Se 2010ZikoPas encore d'évaluation
- M-Energetique Asservissement Et Regulation-Chapitre 1 Et 2Document59 pagesM-Energetique Asservissement Et Regulation-Chapitre 1 Et 2CHEMS EDDINEPas encore d'évaluation
- Tp16 Pilote Automatique de Bateau - Gestion Du Cap Redier CyrilDocument7 pagesTp16 Pilote Automatique de Bateau - Gestion Du Cap Redier CyrilCyril REDIERPas encore d'évaluation
- TP 2Document7 pagesTP 2hasni mh jobPas encore d'évaluation
- TS N°4 Hydrau - Schématisation D'un Circuit HydrauliqueDocument17 pagesTS N°4 Hydrau - Schématisation D'un Circuit HydrauliqueSouleymane SoroPas encore d'évaluation
- Examen 09 10Document5 pagesExamen 09 10ridhajamelPas encore d'évaluation
- Web 2703515 Rev6 (Instal Calybox 1020WT) Livret-Rev06Document15 pagesWeb 2703515 Rev6 (Instal Calybox 1020WT) Livret-Rev06INSUP Langon ConfinementPas encore d'évaluation
- Mesures ChronometriquesDocument5 pagesMesures ChronometriquesAnonymous ap1THdqd3P0% (1)
- Plugin Mesures Chronometriques PDFDocument5 pagesPlugin Mesures Chronometriques PDFbounegabPas encore d'évaluation
- Chapitre1 Introduction À La RégulationDocument9 pagesChapitre1 Introduction À La RégulationAYOUB RIAD100% (1)
- TP Ts UGB2015Document28 pagesTP Ts UGB2015Angus MakPas encore d'évaluation
- TP 3 Regulation TachymetriqueDocument6 pagesTP 3 Regulation TachymetriqueBounegab YoucefPas encore d'évaluation
- JO 8.297 Annexe Classification Et Règles de Construction Parasismique Applicables Aux Bâtiments PDFDocument28 pagesJO 8.297 Annexe Classification Et Règles de Construction Parasismique Applicables Aux Bâtiments PDFMirou YouPas encore d'évaluation
- LP - CCT - S4 - GEL402 - Chapitre 8Document4 pagesLP - CCT - S4 - GEL402 - Chapitre 8Mazama-Esso Moddoh OclooPas encore d'évaluation
- 211 Description Temporelle - La Temporisation Le ComptageDocument6 pages211 Description Temporelle - La Temporisation Le ComptageTahiri MehdiPas encore d'évaluation
- R934C Protocole PDFDocument9 pagesR934C Protocole PDFFarid RezigPas encore d'évaluation
- Polycopie Du TP Régulation Industrielle 2020 2021 PDFDocument11 pagesPolycopie Du TP Régulation Industrielle 2020 2021 PDFleharani soheibPas encore d'évaluation
- Capteurs Temperature - NDocument3 pagesCapteurs Temperature - Nabdelgoui rym100% (1)
- Ligne de Traitement ThermiqueDocument5 pagesLigne de Traitement Thermiqueiraoui jamal (Ebay)Pas encore d'évaluation
- Apport Regulation Automatique: HachanaDocument9 pagesApport Regulation Automatique: Hachanab9zjj5v8cxPas encore d'évaluation
- Chapitre 1 Partie 1 Les Lignes de Transmission Complet - CopieDocument38 pagesChapitre 1 Partie 1 Les Lignes de Transmission Complet - CopieIssam MerzouguiPas encore d'évaluation
- 10.1.609 en 14488 3 3Document13 pages10.1.609 en 14488 3 3Med MohamedPas encore d'évaluation
- TP de Module ElectrochimieDocument16 pagesTP de Module ElectrochimiefatimazahragramziPas encore d'évaluation
- Epreuve 1e Seq Mecanique Appliquee TF3Document2 pagesEpreuve 1e Seq Mecanique Appliquee TF3kaka kaladzePas encore d'évaluation
- Cours Loi de Hooke 2014 2015 (Mekni Nejib)Document1 pageCours Loi de Hooke 2014 2015 (Mekni Nejib)Riadh MarouaniPas encore d'évaluation
- Gamme SPSM Gamme EAS: Alimentation Electrique de Sécurité (AES) Pour Usage Interne SeulementDocument1 pageGamme SPSM Gamme EAS: Alimentation Electrique de Sécurité (AES) Pour Usage Interne SeulementISGEPas encore d'évaluation
- EX3 La Lumière Modèle OndulatoireDocument8 pagesEX3 La Lumière Modèle OndulatoireHome High-TechPas encore d'évaluation
- Structures RappelsDocument5 pagesStructures RappelsAlaimi SeifPas encore d'évaluation
- Chap013 Caquot Forfaitaire - WatermarkDocument20 pagesChap013 Caquot Forfaitaire - WatermarknanfackPas encore d'évaluation
- Thermodynamique ENSA ASFIDocument1 pageThermodynamique ENSA ASFIMOUHSSINE CHADILIPas encore d'évaluation
- Cours Maths 3college International 10 1Document6 pagesCours Maths 3college International 10 1Romayssae BELLOUKIPas encore d'évaluation
- Calculatrice Interdite Option A Exercice 1: I. S. F. A. 2005-2006Document4 pagesCalculatrice Interdite Option A Exercice 1: I. S. F. A. 2005-2006api-3762501Pas encore d'évaluation
- Chapitre 1Document15 pagesChapitre 1Hamza MokhtariPas encore d'évaluation
- Chapitre1 Papier13Document27 pagesChapitre1 Papier13Dieu-Donné NoukounwouiPas encore d'évaluation
- Rapport Du PFE Provisoire Es - SalehyDocument49 pagesRapport Du PFE Provisoire Es - SalehyOumaima ChanchanPas encore d'évaluation
- Longueur Des RailsDocument9 pagesLongueur Des RailsGuelord MayelePas encore d'évaluation
- TD 06Document2 pagesTD 06meriemfrik2Pas encore d'évaluation
- Soudage EMG 21eDocument75 pagesSoudage EMG 21eFisso Ben BenPas encore d'évaluation
- Alimentation Électrique Générale Et MaintenanceDocument14 pagesAlimentation Électrique Générale Et MaintenancedonsallusPas encore d'évaluation
- Cause Des VenuesDocument14 pagesCause Des Venues8bbjsfc9qbPas encore d'évaluation
- ElectriciteDocument38 pagesElectriciteنورالدين نور100% (1)
- 2016-Interne IM CorrDocument29 pages2016-Interne IM CorrRachid FattahPas encore d'évaluation
- Grand Choix de Matériel Pour Le Contrôle QualitéDocument51 pagesGrand Choix de Matériel Pour Le Contrôle QualitéEmile ElomPas encore d'évaluation
- MathsDocument72 pagesMathskatePas encore d'évaluation
- Tpe Amdec 1Document22 pagesTpe Amdec 1Chiranelle KanaPas encore d'évaluation
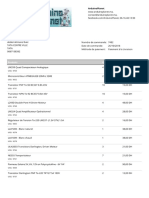
- Arduinoplanet Bon-De-Commande-7482Document2 pagesArduinoplanet Bon-De-Commande-7482abdolbazPas encore d'évaluation
- Anaximandre - FragmentsDocument6 pagesAnaximandre - FragmentsFrancis ProulxPas encore d'évaluation
- 2003 Afrique Correction Exo1 Ondes Sismiques 9 5ptsDocument4 pages2003 Afrique Correction Exo1 Ondes Sismiques 9 5ptstanfous dorraPas encore d'évaluation
- Solution Des Exercices Hydrauliques 2022Document7 pagesSolution Des Exercices Hydrauliques 2022Amine KazouitPas encore d'évaluation