Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Baccalaureat 2004 PDFDocument40 pagesBaccalaureat 2004 PDFJulien AttackPas encore d'évaluation
- Controle - 11 2020Document1 pageControle - 11 2020Kerboub IdrisPas encore d'évaluation
- Centrale 2001 Si PSIDocument15 pagesCentrale 2001 Si PSIbackhousiaPas encore d'évaluation
- Banderoleuse À Plateau Tournant: Devoir de Synthese N°1Document3 pagesBanderoleuse À Plateau Tournant: Devoir de Synthese N°1Rami Ali100% (3)
- Bac GM 2006 Sept Metropole Lève Personne ORIOR PDFDocument33 pagesBac GM 2006 Sept Metropole Lève Personne ORIOR PDFGeorges EllaPas encore d'évaluation
- SujetDocument28 pagesSujetbargo90Pas encore d'évaluation
- TCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseDocument9 pagesTCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseAbdelbassit FadilPas encore d'évaluation
- Role de La Topographie V 17 10 01 PDFDocument55 pagesRole de La Topographie V 17 10 01 PDFEli WisdomPas encore d'évaluation
- DT Rotor Stab Hh100Document34 pagesDT Rotor Stab Hh100Nesrine Letaief100% (3)
- Orrektion Bak 2021 KontroleDocument13 pagesOrrektion Bak 2021 Kontrolemariemhsini8Pas encore d'évaluation
- TP 32 ParaboleDocument7 pagesTP 32 ParaboleKesraoui HichemPas encore d'évaluation
- Notic de CalculeDocument17 pagesNotic de CalculeAbdelali SolPas encore d'évaluation
- Manuel D'installation - CMSI - Com - MI A300161Document124 pagesManuel D'installation - CMSI - Com - MI A300161Jean MichelPas encore d'évaluation
- R Rec BS.1386 0 199812 S!!PDF FDocument33 pagesR Rec BS.1386 0 199812 S!!PDF FRadia BenchadiPas encore d'évaluation
- s2018 Agreg Externe Sii 1 917237Document46 pagess2018 Agreg Externe Sii 1 917237Ahmed JellouliPas encore d'évaluation
- Dpreparation EST2004Document20 pagesDpreparation EST2004sid ali saidjPas encore d'évaluation
- TP4-2 GM WinchDocument5 pagesTP4-2 GM WinchDABAKH LDEEBOYPas encore d'évaluation
- Dossier Technique-Sommaire, DT1,2&3Document5 pagesDossier Technique-Sommaire, DT1,2&3Gamin'Pas encore d'évaluation
- EPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeDocument6 pagesEPREUVE - TECHNOLOGIE Génie Mécanique. Convoyeur À BandeYounes El GhandouriPas encore d'évaluation
- Train ÉpicycloïdalDocument7 pagesTrain ÉpicycloïdalTEBAO PRINCEPas encore d'évaluation
- Tpe TspatialeDocument12 pagesTpe TspatialeMamoudou IyaPas encore d'évaluation
- Concep SujetDocument15 pagesConcep SujetSalah-eddine ZitiPas encore d'évaluation
- DS2 MPII - 27 - 01 - 24 (Sujet)Document6 pagesDS2 MPII - 27 - 01 - 24 (Sujet)cyrinekrichen24Pas encore d'évaluation
- dm1 MathsDocument14 pagesdm1 Mathssamim1971Pas encore d'évaluation
- TP2 - Multivibrateur AstableDocument2 pagesTP2 - Multivibrateur Astablebazanfaresabiou705Pas encore d'évaluation
- Machine Asynchrone Triphasee Principe Fonctionnement Et Structure InterneDocument14 pagesMachine Asynchrone Triphasee Principe Fonctionnement Et Structure InternemauricetappaPas encore d'évaluation
- TD Helico AscenseurDocument8 pagesTD Helico AscenseurWakule Christian MurhabaziPas encore d'évaluation
- Rfid Antenne PatchDocument24 pagesRfid Antenne PatchYossef ARPas encore d'évaluation
- Sec E3a 2011 Si MP PDFDocument25 pagesSec E3a 2011 Si MP PDFAbdelmajid AittalebPas encore d'évaluation
- TD20Document10 pagesTD20Mohamed AbaakilPas encore d'évaluation
- Notice D'utilisationDocument12 pagesNotice D'utilisationMendoud SofianePas encore d'évaluation
- Collazos RapportDocument42 pagesCollazos RapportMBOCK NYOBEPas encore d'évaluation
- Zero SSI Bac2003toulouseDocument15 pagesZero SSI Bac2003toulouseمهدي الرقيقPas encore d'évaluation
- NOTE Calcul Mantaya POUR TIRAGEDocument219 pagesNOTE Calcul Mantaya POUR TIRAGEabdelouahab guedjaliPas encore d'évaluation
- Épreuve de Sciences Industrielles: Cx4614 Banque Commune École Polytechnique - InterensDocument31 pagesÉpreuve de Sciences Industrielles: Cx4614 Banque Commune École Polytechnique - InterensM-zlle MalakPas encore d'évaluation
- Odulation DE Argeur D' Mpulsion: Rojet 1999Document79 pagesOdulation DE Argeur D' Mpulsion: Rojet 1999Youcef Diaf100% (2)
- La Nouvelle Triangulation Tunisienne: RésuméDocument30 pagesLa Nouvelle Triangulation Tunisienne: RésuméKhaled Ben MoallemPas encore d'évaluation
- Corrige U2Document11 pagesCorrige U2Zineb ryadPas encore d'évaluation
- (PV-14) Ristori - A14 PDFDocument8 pages(PV-14) Ristori - A14 PDFsb aliPas encore d'évaluation
- Torseur de Cohesion INSA Partie 1Document17 pagesTorseur de Cohesion INSA Partie 1Abdelali YacoubiPas encore d'évaluation
- Exam 2010 PresentationDocument20 pagesExam 2010 PresentationRamzi MansouriPas encore d'évaluation
- 940642-An-01-Fr-Antennen Stab Rotor SAT HH120 PDFDocument14 pages940642-An-01-Fr-Antennen Stab Rotor SAT HH120 PDFbekraPas encore d'évaluation
- F02818 Rev.a PDFDocument36 pagesF02818 Rev.a PDFTiago Cunha0% (1)
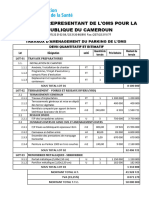
- Devis Parking OmsDocument2 pagesDevis Parking OmsRégis AzanguéPas encore d'évaluation
- Bras AIA (Articulated Inspection Arm) Pour Le Tore Supra: I Présentation Générale Du Bras AIADocument16 pagesBras AIA (Articulated Inspection Arm) Pour Le Tore Supra: I Présentation Générale Du Bras AIALawkhsPas encore d'évaluation
- Thèsea 5Document21 pagesThèsea 5lkmkmlkPas encore d'évaluation
- TSMFM 2 Teorie CorrigéeDocument10 pagesTSMFM 2 Teorie Corrigéeayoub gannniPas encore d'évaluation
- JNGG 2010 pp 571-578 Brian鏾nDocument8 pagesJNGG 2010 pp 571-578 Brian鏾nwen chaoPas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - CorrigDocument2 pagesExercices - Cinmatique - Trajectoires - Systme Bielle Manivelle - Poulie - Corrigspectrum6675% (4)
- CaniveauDocument112 pagesCaniveauYao Albert KouakouPas encore d'évaluation
- Ds2 Centrale-Supélec MP 2009 v2Document14 pagesDs2 Centrale-Supélec MP 2009 v2Eliaz QrCPas encore d'évaluation
- Bac S Sciences de L Ingenieur Si Nouvelle Caledonie 2009 SujetDocument34 pagesBac S Sciences de L Ingenieur Si Nouvelle Caledonie 2009 SujetAbderrazak MiassarPas encore d'évaluation
- F 00218Document36 pagesF 00218Tiago CunhaPas encore d'évaluation
- CADRE QUANTITATIF FinalDocument5 pagesCADRE QUANTITATIF FinalMoundai RakseuhbePas encore d'évaluation
- MecaniqueDocument19 pagesMecaniqueabdel83Pas encore d'évaluation
- Contrôle 2 - 2022Document11 pagesContrôle 2 - 2022Bilal LaakelPas encore d'évaluation
- Analyse VibratoireDocument76 pagesAnalyse VibratoireTesnim DridiiPas encore d'évaluation
- MXV2skGKAlft5b8o53y3R9pc8zhlrp FRDocument9 pagesMXV2skGKAlft5b8o53y3R9pc8zhlrp FRDemostene NeacsiuPas encore d'évaluation
- Ad-2 LfbaDocument5 pagesAd-2 LfbaDemostene NeacsiuPas encore d'évaluation
- BlankDocument1 pageBlankDemostene NeacsiuPas encore d'évaluation
- BlankDocument1 pageBlankDemostene NeacsiuPas encore d'évaluation
- Foire Aux Questions - Airways CollegeDocument1 pageFoire Aux Questions - Airways CollegeDemostene NeacsiuPas encore d'évaluation
- Tarifs PPC 2018Document1 pageTarifs PPC 2018Demostene NeacsiuPas encore d'évaluation
- SujetDocument15 pagesSujetDemostene NeacsiuPas encore d'évaluation
- Dossier TravailDocument13 pagesDossier TravailDemostene NeacsiuPas encore d'évaluation
- CorrigeDocument5 pagesCorrigeDemostene NeacsiuPas encore d'évaluation
- Procédures RadioDocument3 pagesProcédures RadioDemostene NeacsiuPas encore d'évaluation
- Dokumen - Tips PokDocument272 pagesDokumen - Tips PokMokrani JaberPas encore d'évaluation
- Stage Leoni PDFDocument1 pageStage Leoni PDFChourouk MeskiniPas encore d'évaluation
- Atlas AB 1602DDocument36 pagesAtlas AB 1602DVontextPas encore d'évaluation
- Le Chapeau de GendarmeDocument9 pagesLe Chapeau de GendarmeAhmed Hassane100% (1)
- Notice Pose Tole TuileDocument4 pagesNotice Pose Tole TuileBledPas encore d'évaluation
- BiologieDocument1 pageBiologieFaiza BelajrouPas encore d'évaluation
- Sujet5 - Dispositif de SerrageDocument6 pagesSujet5 - Dispositif de SerrageMohsen Laabidi80% (5)
- Chapitre 2 Procédés D'obtention Des Pièces Sans Enlèvement de MatièreDocument11 pagesChapitre 2 Procédés D'obtention Des Pièces Sans Enlèvement de MatièreEl Dziri100% (1)
- MT 50Document18 pagesMT 50Majda BelkhaouiPas encore d'évaluation
- Válvula de Alivio Overflow Valve Clapet de DéchargeDocument11 pagesVálvula de Alivio Overflow Valve Clapet de DéchargeLUCASPas encore d'évaluation
- نقل الحركةDocument36 pagesنقل الحركةRizouga AbdallahPas encore d'évaluation
- Compte Rendu G1Document6 pagesCompte Rendu G1Lahcen BOULBAZPas encore d'évaluation
- CV 1Document2 pagesCV 1MohamedAmineBechikhPas encore d'évaluation
- ÉlectrotechniqueDocument22 pagesÉlectrotechniqueBarney RossPas encore d'évaluation
- Service Information D55NDocument7 pagesService Information D55NNicolas AlarconPas encore d'évaluation
- Cours D'analyse 2nd Ch-Ti 2020 ProfDocument21 pagesCours D'analyse 2nd Ch-Ti 2020 Proffokou.simplicegmail.com Fokou SimplicePas encore d'évaluation
- Les Outils de TracageDocument6 pagesLes Outils de TracagePublinet BoughraraPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Remplissage Et D'évacuation Des Boites - 1ère AS (2013-2014) MR BAAZAOUI AbderraoufDocument6 pagesDevoir de Synthèse N°1 - Technologie - Poste Automatique de Remplissage Et D'évacuation Des Boites - 1ère AS (2013-2014) MR BAAZAOUI AbderraoufAhmed Ahmed100% (1)
- Presentation Mécanique Appliquée 1129Document7 pagesPresentation Mécanique Appliquée 1129ussefPas encore d'évaluation
- Fiche Tech Extrémité - HTADocument1 pageFiche Tech Extrémité - HTABen Rejab HichemPas encore d'évaluation
- Liaisons Equivalentes-2Document5 pagesLiaisons Equivalentes-2Mahrez ZaafouriPas encore d'évaluation
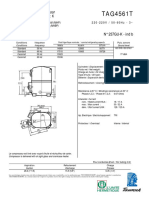
- Tag 4561 TDocument2 pagesTag 4561 TWilmerPas encore d'évaluation
- CNC Si Psi 2019Document26 pagesCNC Si Psi 2019Karima HamdanPas encore d'évaluation
- TP Mip MapDocument4 pagesTP Mip MapAhmed anis GasmiPas encore d'évaluation
- Filetage TaraudageDocument3 pagesFiletage Taraudagehe200gabPas encore d'évaluation
- BAC 2019 SI Normale STM CorrigéDocument9 pagesBAC 2019 SI Normale STM CorrigéIlyas MhammediPas encore d'évaluation
- TD Mécanique Première PartieDocument4 pagesTD Mécanique Première Partieemmanuelmayala40Pas encore d'évaluation
- qp177356 BKDocument97 pagesqp177356 BKparahu ariefPas encore d'évaluation
- TD N°2Document2 pagesTD N°2LaidPas encore d'évaluation
- Coefficient de Composants D'installation PDFDocument1 pageCoefficient de Composants D'installation PDFsayeb hedhiliPas encore d'évaluation