Vous aimerez peut-être aussi
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- DR MotoréducteurDocument5 pagesDR MotoréducteurdjalikadjouPas encore d'évaluation
- Système À Étudier - Carton PréforméDocument14 pagesSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Exam 2010 PresentationDocument20 pagesExam 2010 PresentationRamzi MansouriPas encore d'évaluation
- Exercice Dispositif de Levage Et Basculement ElvesDocument6 pagesExercice Dispositif de Levage Et Basculement ElvesPFAPas encore d'évaluation
- TP STATIQUE-tp1Document4 pagesTP STATIQUE-tp1Faci DnfPas encore d'évaluation
- Sujet 4Document5 pagesSujet 4elie chanePas encore d'évaluation
- ENONCE TP Statique CRIC FILAIRE MECA3D V2012 PDFDocument4 pagesENONCE TP Statique CRIC FILAIRE MECA3D V2012 PDFSCORSAM1Pas encore d'évaluation
- Freins ApplicationsDocument13 pagesFreins ApplicationsSAAD WAKKASPas encore d'évaluation
- TP Ef NacelleDocument7 pagesTP Ef NacellebousmailPas encore d'évaluation
- Eval Irmatic1Document5 pagesEval Irmatic1Chanol NoupaPas encore d'évaluation
- 3320 U33 Sujet 2013Document10 pages3320 U33 Sujet 2013crazywhale112Pas encore d'évaluation
- PSI C2 Chap4 TD4V2 PDFDocument10 pagesPSI C2 Chap4 TD4V2 PDFElkettany mohamedPas encore d'évaluation
- Eval IrmaticDocument4 pagesEval IrmaticChanol NoupaPas encore d'évaluation
- Soft Computing and Electrical EngineeringDocument11 pagesSoft Computing and Electrical EngineeringMadeleine MalembouetPas encore d'évaluation
- 2013 N KkkoDocument19 pages2013 N Kkkositescompte4Pas encore d'évaluation
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- Fascicule - 2 - Mode D'emploi - Exemples PDFDocument67 pagesFascicule - 2 - Mode D'emploi - Exemples PDFhamza3660Pas encore d'évaluation
- Cotation FonctionnelleDocument3 pagesCotation FonctionnelleMIMFS100% (3)
- Projet CMIDocument16 pagesProjet CMIMedeho kodjo Simon henochPas encore d'évaluation
- Note de Calcul D'une Batiment Selon RPA 99 Version 2003Document24 pagesNote de Calcul D'une Batiment Selon RPA 99 Version 2003Amine Bou100% (1)
- Tenue A La Fatigue Assemblage BoulonnepdfDocument12 pagesTenue A La Fatigue Assemblage BoulonnepdfrorylecasseurPas encore d'évaluation
- Exemple Deversement Ec3Document6 pagesExemple Deversement Ec3Realmak AweniPas encore d'évaluation
- 16 SI-SMB-Rtpage-2015-Sjt-corrigéDocument14 pages16 SI-SMB-Rtpage-2015-Sjt-corrigéMouad MouadPas encore d'évaluation
- Flambement Panneau CompositeDocument9 pagesFlambement Panneau CompositeDali Ben ChagraPas encore d'évaluation
- TD 1 LiaisonsschmacinmatiqueDocument6 pagesTD 1 LiaisonsschmacinmatiqueSamba SallPas encore d'évaluation
- Engrenage Conique Fini - YABIA PDFDocument27 pagesEngrenage Conique Fini - YABIA PDFMichou YabiaPas encore d'évaluation
- 1-Liaisons en Parallèles: X Z Z XDocument12 pages1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- Session PricipalDocument4 pagesSession Pricipalmypc1990Pas encore d'évaluation
- 61 Etude de Portique CM66Document16 pages61 Etude de Portique CM66Marouane EzzaimPas encore d'évaluation
- CPI1-CONST-C-Guidage en RotationDocument13 pagesCPI1-CONST-C-Guidage en RotationEL CosmoPas encore d'évaluation
- Réducteur Éssuis-GlacesDocument12 pagesRéducteur Éssuis-GlacesMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Baccalaureat 2005Document32 pagesBaccalaureat 2005Mohammed reda HadiPas encore d'évaluation
- Mecanique Et RDM - Exercices Tome 1Document86 pagesMecanique Et RDM - Exercices Tome 1Abir Mabrouki100% (5)
- Dossier Technique Levage V2011 PDFDocument25 pagesDossier Technique Levage V2011 PDFSimohamed BouikrarPas encore d'évaluation
- Ml4ascp DT CopieDocument14 pagesMl4ascp DT CopieEmpire LalouPas encore d'évaluation
- Chapitre 07Document9 pagesChapitre 07DidaBouchPas encore d'évaluation
- TP2 SimulationDocument7 pagesTP2 SimulationKamel BousninaPas encore d'évaluation
- Guidage en Rotation ApplicationsDocument7 pagesGuidage en Rotation ApplicationsAli Akoumiste100% (4)
- NOTE-DE-CALCUL StadeDocument156 pagesNOTE-DE-CALCUL StadeOussama AMARI50% (2)
- RNV 2014 4Document53 pagesRNV 2014 4Nacer IzriPas encore d'évaluation
- TD Transpalette CorrectionDocument3 pagesTD Transpalette Correctionkaoutartayb64Pas encore d'évaluation
- Freins-ApplicationsDocument13 pagesFreins-ApplicationsAhmedPas encore d'évaluation
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- CALCULDUNBTIMENTENR1Document44 pagesCALCULDUNBTIMENTENR1Fala-Balaki TCHALIMDABALOPas encore d'évaluation
- Auto - BACF1 - 201901Document13 pagesAuto - BACF1 - 201901fopamervinPas encore d'évaluation
- TP1 SPE SympactDocument15 pagesTP1 SPE SympactPenda NiassPas encore d'évaluation
- Technique PDFDocument8 pagesTechnique PDFpaire animePas encore d'évaluation
- TechniqueDocument8 pagesTechniquepaire animePas encore d'évaluation
- tp1 TransmissionDocument10 pagestp1 Transmissionmohand72Pas encore d'évaluation
- Descente de Charges Indice A 19-11-2016Document10 pagesDescente de Charges Indice A 19-11-2016ilias2003Pas encore d'évaluation
- Modelisation Par Sap 2000Document29 pagesModelisation Par Sap 2000Fatma BelaPas encore d'évaluation
- MP Si 1Document15 pagesMP Si 1Ange wilfried FofanaPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #1Pas encore d'évaluation
- Mathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculDocument15 pagesMathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculMouhsineAtbPas encore d'évaluation
- Généralités Sur La RhéologieDocument5 pagesGénéralités Sur La Rhéologiezoom scaipPas encore d'évaluation
- 9327 Controle Des Engrenages EnspsDocument8 pages9327 Controle Des Engrenages EnspsKouchad FouadPas encore d'évaluation
- Merged 20200624 232813Document118 pagesMerged 20200624 232813Anas LghaziPas encore d'évaluation
- TP Pendule SimpleDocument6 pagesTP Pendule Simpleben fayssal100% (1)
- Poussoir HydrauliqueDocument6 pagesPoussoir HydrauliqueFosseni DialloPas encore d'évaluation
- M13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDocument71 pagesM13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDriss Benomar100% (13)
- Manuel 300 Tei 2020Document176 pagesManuel 300 Tei 2020pierre lathierePas encore d'évaluation
- PiquageDocument4 pagesPiquagefanfan.boreauPas encore d'évaluation
- Support de Cours DYNAMIQUE CopieDocument14 pagesSupport de Cours DYNAMIQUE CopieDjeti LabantePas encore d'évaluation
- Module Hydraulique BT MSDocument16 pagesModule Hydraulique BT MSOB1dimiPas encore d'évaluation
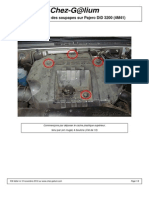
- Réglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Document9 pagesRéglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Maroselli CharlesPas encore d'évaluation
- Acoustique, Chapitre 2Document586 pagesAcoustique, Chapitre 2Ali KHALFAPas encore d'évaluation
- Pompe TriplexDocument23 pagesPompe TriplexBac mathPas encore d'évaluation
- Rapport PFE FinalDocument87 pagesRapport PFE Finalmoez ben youssef100% (1)
- STATIQUE DES FLUIDES ProfDocument12 pagesSTATIQUE DES FLUIDES ProfAbdoulnassirou BassongouPas encore d'évaluation
- AzziSmail AzziBDocument69 pagesAzziSmail AzziBOubachir Mi DouPas encore d'évaluation
- Présentation Étude PontDocument34 pagesPrésentation Étude PontIlyes TakellaletPas encore d'évaluation
- LES COURROIES 1 (1) - Lecture SeuleDocument20 pagesLES COURROIES 1 (1) - Lecture SeuleSaid CheikhPas encore d'évaluation
- Moteur À COURANT CONTINUDocument3 pagesMoteur À COURANT CONTINUAladji SyPas encore d'évaluation
- Statique FrottementDocument33 pagesStatique FrottementŒū Ssa MēPas encore d'évaluation
- Principe de TournageDocument5 pagesPrincipe de TournageAchraf AitPas encore d'évaluation
- Etude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisDocument12 pagesEtude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisGeotech NicalPas encore d'évaluation
- IntroductionDocument5 pagesIntroductionBenabed AekPas encore d'évaluation
- Case Damping Meaning-T00-073Document17 pagesCase Damping Meaning-T00-073mPas encore d'évaluation
- Généralités: Selon ISO 724Document3 pagesGénéralités: Selon ISO 724M.Khaled GdouraPas encore d'évaluation
- Controle Métaux PDFDocument15 pagesControle Métaux PDFfatimazahra kheraziPas encore d'évaluation
- EP08150369NWA1Document16 pagesEP08150369NWA1Omar SelamiPas encore d'évaluation
- Sécurité Sur Les Convoyeurs À Courroie PDFDocument85 pagesSécurité Sur Les Convoyeurs À Courroie PDFChristophe Schwartz100% (1)
- 5-1boite de Cisaillement PDFDocument4 pages5-1boite de Cisaillement PDFUomoD'AffariPas encore d'évaluation