Vous aimerez peut-être aussi
- MMC ExercicesDocument57 pagesMMC Exercicesbelkacem100% (2)
- Le développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionD'EverandLe développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionPas encore d'évaluation
- CV Taoufiq EL IDRISSI PDFDocument1 pageCV Taoufiq EL IDRISSI PDFTaoufiq El IdrissiPas encore d'évaluation
- Traitement ThermiqueDocument169 pagesTraitement Thermiquelamiabejaoui67% (3)
- BriefingsA320 QT&MCDocument132 pagesBriefingsA320 QT&MCbilel100% (4)
- Exii 2Document3 pagesExii 2Narjiss ShimiPas encore d'évaluation
- Telecom Par SatDocument42 pagesTelecom Par SatAbdelhamid HarakatPas encore d'évaluation
- TD PDFDocument39 pagesTD PDFFatima OukaddiPas encore d'évaluation
- TDanalyse Fonctionnelle PDFDocument10 pagesTDanalyse Fonctionnelle PDFmecaniquestiPas encore d'évaluation
- HelicoDocument16 pagesHelicomatoyayPas encore d'évaluation
- Sujet-Janvier 2019 - Machine D'essai Mécanique PDFDocument20 pagesSujet-Janvier 2019 - Machine D'essai Mécanique PDFMrnadhir MecaniquePas encore d'évaluation
- Application 3 Moto Compresseur D Air A Piston PDFDocument10 pagesApplication 3 Moto Compresseur D Air A Piston PDFHajar NhailaPas encore d'évaluation
- Main RotorDocument87 pagesMain RotorSofianeMendoudPas encore d'évaluation
- Sujet Esa 2021Document14 pagesSujet Esa 2021Zerouala OussamaPas encore d'évaluation
- Sujet Mai-2018 - Poste de Perçage Automatique PDFDocument19 pagesSujet Mai-2018 - Poste de Perçage Automatique PDFdiassaPas encore d'évaluation
- Les HelicopteresDocument323 pagesLes HelicopteresNawto100% (1)
- Synthese Eoliennes RadarsDocument127 pagesSynthese Eoliennes RadarsIoana SuciuPas encore d'évaluation
- Suj 1 SMDocument6 pagesSuj 1 SMMouâd Bihi100% (1)
- TCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseDocument9 pagesTCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseAbdelbassit FadilPas encore d'évaluation
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Document6 pages3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif Hamdi100% (1)
- Système À Étudier - Carton PréforméDocument14 pagesSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Exam 2010 PresentationDocument20 pagesExam 2010 PresentationRamzi MansouriPas encore d'évaluation
- 4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFDocument24 pages4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFMed Ali MaatougPas encore d'évaluation
- Chapitre-2-Description de La Partie Matérielle Du RobotDocument15 pagesChapitre-2-Description de La Partie Matérielle Du RobotMohamed TaihiPas encore d'évaluation
- Sing SMDocument15 pagesSing SMilyass.babkhoutiPas encore d'évaluation
- Variateur-Courroie STEDocument9 pagesVariateur-Courroie STEMansour NdiayePas encore d'évaluation
- CI3 TD21 Machine Déchargement CombustibleDocument4 pagesCI3 TD21 Machine Déchargement CombustiblelotfiPas encore d'évaluation
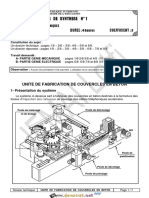
- Devoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR LotfiDocument12 pagesDevoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR Lotfizxhmnzao100% (2)
- (Corslci) (TD) RoburocDocument9 pages(Corslci) (TD) RoburocAbdelali YacoubiPas encore d'évaluation
- 2904 Porteuse Motorisee Mecanique PDFDocument17 pages2904 Porteuse Motorisee Mecanique PDFJawher SalemPas encore d'évaluation
- TD Moteur Asynchrone - Batteur-MelangeurDocument11 pagesTD Moteur Asynchrone - Batteur-MelangeurSalah SalahPas encore d'évaluation
- 2609 Archiveur Multimedia Mecanique PDFDocument24 pages2609 Archiveur Multimedia Mecanique PDFdxsszszPas encore d'évaluation
- Controle - 11 2020Document1 pageControle - 11 2020Kerboub IdrisPas encore d'évaluation
- RobuRoc ProfDocument10 pagesRobuRoc ProfAbdelali YacoubiPas encore d'évaluation
- Chantier STSDocument34 pagesChantier STSRachid RichardPas encore d'évaluation
- CI SLCI 2 Suj RobotinoDocument6 pagesCI SLCI 2 Suj RobotinoNadim HafsiPas encore d'évaluation
- Turbidimetre Construction MecaniqueDocument19 pagesTurbidimetre Construction MecaniquewatsopPas encore d'évaluation
- DS1 Scie Sauteuse 2010 PDFDocument4 pagesDS1 Scie Sauteuse 2010 PDFSimo StitPas encore d'évaluation
- TD 01 - Etude Des Systemes PDFDocument8 pagesTD 01 - Etude Des Systemes PDFZied KtariPas encore d'évaluation
- Baccalaureat 2004 PDFDocument40 pagesBaccalaureat 2004 PDFJulien AttackPas encore d'évaluation
- Devoir N°1 Tramway SMB Lamzibri 2023Document8 pagesDevoir N°1 Tramway SMB Lamzibri 2023taziadambkPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument12 pagesDevoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi Slaheddinemoussa zainPas encore d'évaluation
- Calculs Des Equipements de Forage - Baldenko - 2012-40-51 FRDocument13 pagesCalculs Des Equipements de Forage - Baldenko - 2012-40-51 FRFa TehPas encore d'évaluation
- Chapitre7 PDFDocument74 pagesChapitre7 PDFABELWALID71% (7)
- TSI-1 S411/S4321 Cinématique Et SinusoïdalDocument2 pagesTSI-1 S411/S4321 Cinématique Et SinusoïdalEliesPas encore d'évaluation
- Sujet Option B 2009Document64 pagesSujet Option B 2009Mohamed Ali TaheurPas encore d'évaluation
- Cpi1 Const TP Doctravail Ri40Document3 pagesCpi1 Const TP Doctravail Ri40imrhoulPas encore d'évaluation
- Baccalaureat 2005Document32 pagesBaccalaureat 2005Mohammed reda HadiPas encore d'évaluation
- Examen-2Ing-GSIL 2022 VVDocument3 pagesExamen-2Ing-GSIL 2022 VVAmeni Kh100% (1)
- TP Panneau SolaireDocument7 pagesTP Panneau Solairebeldjehem mohamed0% (2)
- 3CDI3.1 ACOT3 ChoixetvalidationdessolutionsDocument1 page3CDI3.1 ACOT3 ChoixetvalidationdessolutionsGassoumi WalidPas encore d'évaluation
- app6-STE-STM-SMB - Destribution de TubesDocument21 pagesapp6-STE-STM-SMB - Destribution de TubesMajed NesrinePas encore d'évaluation
- Sec 2006 Sib PT PDFDocument50 pagesSec 2006 Sib PT PDFtaiebshow100% (1)
- Icna 2011 SujetDocument26 pagesIcna 2011 SujetgtPas encore d'évaluation
- app6-STE-STM-SMB - Destribution de TubesDocument21 pagesapp6-STE-STM-SMB - Destribution de TubesYoussefPas encore d'évaluation
- TD 18 - Loi Entrée-Sortie Par Fermeture GéométriqueDocument4 pagesTD 18 - Loi Entrée-Sortie Par Fermeture GéométriqueJawad Hamriti100% (1)
- Sec E3a 2011 Si PSI PDFDocument50 pagesSec E3a 2011 Si PSI PDFTriki BilelPas encore d'évaluation
- F2D COSIM MDOeMotor Summary FRDocument11 pagesF2D COSIM MDOeMotor Summary FRRachid MoussaouiPas encore d'évaluation
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Document7 pages3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif HamdiPas encore d'évaluation
- Proposal Eci Ref D19060 - ADocument5 pagesProposal Eci Ref D19060 - ANguyen Minh DucPas encore d'évaluation
- Etude Est Un ConvoyeurDocument20 pagesEtude Est Un ConvoyeurPeralta AdrianoPas encore d'évaluation
- DT DS2 3ST 23 24Document7 pagesDT DS2 3ST 23 24Nejib JallouliPas encore d'évaluation
- Ds Tapis de Course SteDocument7 pagesDs Tapis de Course SteIbra Moulay100% (2)
- ProjetDocument6 pagesProjetMohamedPas encore d'évaluation
- Bras RobotDocument33 pagesBras RobotAmine ChiguerPas encore d'évaluation
- Cglycees 2007 SujetDocument30 pagesCglycees 2007 Sujettony863Pas encore d'évaluation
- TG MicrocontrolDocument8 pagesTG MicrocontrolrahmaboufalghaPas encore d'évaluation
- Commande Moteur Pas A Pas Bipolaire Par Fpga (Altera Cyclone 2)Document23 pagesCommande Moteur Pas A Pas Bipolaire Par Fpga (Altera Cyclone 2)Omar Bouamoud80% (5)
- 01 Bac 2008 Princpale CorrigéDocument9 pages01 Bac 2008 Princpale CorrigéMohamed AbedPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- CC2020 21Document1 pageCC2020 21Salah-eddine ZitiPas encore d'évaluation
- Rapport P6 2020 30Document46 pagesRapport P6 2020 30Salah-eddine ZitiPas encore d'évaluation
- Ziti Salah EddineDocument4 pagesZiti Salah EddineSalah-eddine ZitiPas encore d'évaluation
- Ziti Salah EddineDocument4 pagesZiti Salah EddineSalah-eddine ZitiPas encore d'évaluation
- Lakher Déverrouillé 1 91Document89 pagesLakher Déverrouillé 1 91Salah-eddine ZitiPas encore d'évaluation
- Rapport Badr Elhaski Imia (Version Final)Document92 pagesRapport Badr Elhaski Imia (Version Final)Salah-eddine ZitiPas encore d'évaluation
- Cours Thermo PDFDocument28 pagesCours Thermo PDFKarime AminePas encore d'évaluation
- 00controle Continu FI CPI 18-19Document6 pages00controle Continu FI CPI 18-19Salah-eddine ZitiPas encore d'évaluation
- Le ThèmeDocument1 pageLe ThèmeSalah-eddine ZitiPas encore d'évaluation
- Chapitre Concept Et Finalité de L'entreprise1 Avec ModificationsDocument29 pagesChapitre Concept Et Finalité de L'entreprise1 Avec ModificationsSalah-eddine ZitiPas encore d'évaluation
- PpteconomieDocument9 pagesPpteconomieSalah-eddine ZitiPas encore d'évaluation
- Cours 7Document18 pagesCours 7Salah-eddine ZitiPas encore d'évaluation
- Corr Cours 7 PDFDocument13 pagesCorr Cours 7 PDFBerenger MabéléPas encore d'évaluation
- Dédicace 1Document53 pagesDédicace 1Salah-eddine ZitiPas encore d'évaluation
- RDM TD TractionDocument2 pagesRDM TD TractionSalah-eddine ZitiPas encore d'évaluation
- Controle RDM Fsts 21.12.2015Document2 pagesControle RDM Fsts 21.12.2015Salah-eddine ZitiPas encore d'évaluation
- Corr Cours 7 PDFDocument13 pagesCorr Cours 7 PDFBerenger MabéléPas encore d'évaluation
- Controle RDM FSTS 15.11.2016Document2 pagesControle RDM FSTS 15.11.2016Salah-eddine ZitiPas encore d'évaluation
- FSTS CONTROLE RDM 19.11.2014 Avec AnnexeDocument4 pagesFSTS CONTROLE RDM 19.11.2014 Avec AnnexeSalah-eddine ZitiPas encore d'évaluation
- Controle RDM FSTS 15.11.2016Document2 pagesControle RDM FSTS 15.11.2016Salah-eddine ZitiPas encore d'évaluation
- FSTS CONTROLE RDM 19.11.2014 Avec AnnexeDocument4 pagesFSTS CONTROLE RDM 19.11.2014 Avec AnnexeSalah-eddine ZitiPas encore d'évaluation
- Dédicace 1Document53 pagesDédicace 1Salah-eddine ZitiPas encore d'évaluation
- 1 Présentation Du Projet 1 (Réparé)Document31 pages1 Présentation Du Projet 1 (Réparé)Salah-eddine ZitiPas encore d'évaluation
- RDM TD TractionDocument2 pagesRDM TD TractionSalah-eddine ZitiPas encore d'évaluation
- Controle RDM FSTS 15.11.2016Document2 pagesControle RDM FSTS 15.11.2016Salah-eddine ZitiPas encore d'évaluation
- Rapport Projet Olienne Axe Vertical 2002 2003Document26 pagesRapport Projet Olienne Axe Vertical 2002 2003SALIMIPas encore d'évaluation
- Maintien de La NavigabilitéDocument57 pagesMaintien de La NavigabilitéCyprien Smith YoulouPas encore d'évaluation
- ATPL-Air Law Professione Volare-AnswersDocument4 pagesATPL-Air Law Professione Volare-AnswerspatrouilledeafrancePas encore d'évaluation
- Bitstream 117130Document6 pagesBitstream 117130Màr WàPas encore d'évaluation
- AD2GMTNDocument14 pagesAD2GMTNAmina LaarabiPas encore d'évaluation
- Gagarine - ParolesDocument1 pageGagarine - ParolesElodie Vivat VaillantPas encore d'évaluation
- M12 Chute Libre FrottementsDocument11 pagesM12 Chute Libre FrottementsNeoXana01Pas encore d'évaluation
- Brahmi HamzaDocument131 pagesBrahmi HamzaMohamed el marhoune0% (1)
- Carte VAC GénéralitésDocument97 pagesCarte VAC GénéralitésThibault ChapelPas encore d'évaluation
- Brochure Architecturale Zonwering FR PDFDocument48 pagesBrochure Architecturale Zonwering FR PDFCarolina MacielPas encore d'évaluation
- Phraséologie VFRDocument66 pagesPhraséologie VFRLaurent leclercqPas encore d'évaluation
- ANNEXE 7 Note de Calcul Mur en AileDocument19 pagesANNEXE 7 Note de Calcul Mur en AileAbdlkrimTaouylPas encore d'évaluation
- Global Positioning System - WikDocument5 pagesGlobal Positioning System - Wikmerzak seghirPas encore d'évaluation
- Rapport BureauDocument39 pagesRapport BureauAbdou AarabPas encore d'évaluation
- Brahim CVDocument1 pageBrahim CVBrahim KhPas encore d'évaluation
- Examen34 PDFDocument4 pagesExamen34 PDFsoufyane el ouahabiPas encore d'évaluation
- Norme en 9100Document19 pagesNorme en 9100Yassine El OuadiPas encore d'évaluation
- Chapitre 04Document5 pagesChapitre 04CHiZORI 19Pas encore d'évaluation
- Formulaire MécaniqueDocument6 pagesFormulaire MécaniqueLuc AsensioPas encore d'évaluation
- A Quelle Heure Arrive L'avionDocument3 pagesA Quelle Heure Arrive L'avionBelen LlorentePas encore d'évaluation
- Portique de RiveDocument65 pagesPortique de RiveAnonymous wwD1u4TmGh100% (1)
- DNA Drone FR Print PagesDocument4 pagesDNA Drone FR Print Pagesmohamed.benhamoudaPas encore d'évaluation
- Manuel Entretien DynamicDocument90 pagesManuel Entretien Dynamicviorelu99Pas encore d'évaluation
- MasterDocument101 pagesMasterSili SimoPas encore d'évaluation