Vous aimerez peut-être aussi
- Bac SSI 2009 Actionneur Commande Vol A380Document34 pagesBac SSI 2009 Actionneur Commande Vol A380kingofdarkness2010Pas encore d'évaluation
- Rapport BureauDocument39 pagesRapport BureauAbdou AarabPas encore d'évaluation
- Exam 2010 PresentationDocument20 pagesExam 2010 PresentationRamzi MansouriPas encore d'évaluation
- Examen 3ème 2013THSADocument14 pagesExamen 3ème 2013THSAAYA OUEZGANPas encore d'évaluation
- Avion Airbus A380Document35 pagesAvion Airbus A380Salma BouijiPas encore d'évaluation
- Aubes TurboMDocument18 pagesAubes TurboMM DouniaPas encore d'évaluation
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
- Schéma CinématiqueDocument19 pagesSchéma CinématiqueSimo StitPas encore d'évaluation
- 3IL Stewart Dossier TechniqueDocument11 pages3IL Stewart Dossier TechniqueHoussem RadhouanePas encore d'évaluation
- XENS PSI 2020 TrainAtterrissage SujetDocument40 pagesXENS PSI 2020 TrainAtterrissage SujetyassinePas encore d'évaluation
- Commande de Twin RotorDocument59 pagesCommande de Twin RotorMECHRI ABDELHAKPas encore d'évaluation
- TD05Document0 pageTD05NeoXana01Pas encore d'évaluation
- COMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Document16 pagesCOMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Salma Rekik100% (1)
- (Cin) (TD) Centrifugeuse Humaine PDFDocument4 pages(Cin) (TD) Centrifugeuse Humaine PDFoussemaPas encore d'évaluation
- TP 7 Etude Chaine Transmission Puissance PDFDocument22 pagesTP 7 Etude Chaine Transmission Puissance PDFAGBAPas encore d'évaluation
- Plateau Cyclique (Aéronautique) - WikipédiaDocument15 pagesPlateau Cyclique (Aéronautique) - WikipédiaAbdoulrazack NaguibPas encore d'évaluation
- CI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument10 pagesCI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled Jberi100% (1)
- Cours INTRO 2023-2024Document253 pagesCours INTRO 2023-2024dzddt47fyyPas encore d'évaluation
- Sec CCP 2007 Si MPDocument17 pagesSec CCP 2007 Si MPbabibenPas encore d'évaluation
- PSI7SIDocument32 pagesPSI7SIbassem SakjiPas encore d'évaluation
- TD Frein AppontageDocument12 pagesTD Frein Appontagehaitam100% (1)
- 04-ACS SujetDocument60 pages04-ACS SujethaiderPas encore d'évaluation
- Turbines À GazDocument8 pagesTurbines À GazAladin ZeribiPas encore d'évaluation
- 3 TP Etude Du Systeme Bielle ManivelleDocument13 pages3 TP Etude Du Systeme Bielle Manivellefadi hajjiPas encore d'évaluation
- app8-TAPIS DE COURSEDocument12 pagesapp8-TAPIS DE COURSEfaroukPas encore d'évaluation
- Changeur Outil Ens-XDocument7 pagesChangeur Outil Ens-XseddikmorabetPas encore d'évaluation
- Cours Systemes de Transmission de MouvementDocument5 pagesCours Systemes de Transmission de MouvementdjalikadjouPas encore d'évaluation
- Système À Étudier - Carton PréforméDocument14 pagesSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Rapport G218Document46 pagesRapport G218Badr EdouhabiPas encore d'évaluation
- Concep SujetDocument15 pagesConcep SujetSalah-eddine ZitiPas encore d'évaluation
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- Si A 2014 PTDocument54 pagesSi A 2014 PTxevniPas encore d'évaluation
- CCP 2013 (Filière Mpsi)Document20 pagesCCP 2013 (Filière Mpsi)Pierre-Yves CaylaPas encore d'évaluation
- 3 TP Etude Du Systeme Bielle ManivelleDocument12 pages3 TP Etude Du Systeme Bielle ManivelleNassim RabaouiPas encore d'évaluation
- TDS1Chariot de Golf SymlalistarDocument18 pagesTDS1Chariot de Golf Symlalistarsisko blPas encore d'évaluation
- Centre Usinage 5axeDocument13 pagesCentre Usinage 5axeing_taharPas encore d'évaluation
- A.décrire Les Principales Fonctions Techniques Assurées Au Sein D'un AéronefDocument17 pagesA.décrire Les Principales Fonctions Techniques Assurées Au Sein D'un AéronefTaha - VidéosPas encore d'évaluation
- Projet D'introduction Robot Ericc StatiqueDocument5 pagesProjet D'introduction Robot Ericc StatiquefaycaldjemmadPas encore d'évaluation
- Calculs Des Equipements de Forage - Baldenko - 2012-40-51 FRDocument13 pagesCalculs Des Equipements de Forage - Baldenko - 2012-40-51 FRFa TehPas encore d'évaluation
- MP Si 1Document15 pagesMP Si 1Ange wilfried FofanaPas encore d'évaluation
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- Serie Transmission 2Document3 pagesSerie Transmission 2mnassri houcinePas encore d'évaluation
- 3 DS2 - DT 2020 - 2021Document5 pages3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- Ml4ascp DT CopieDocument14 pagesMl4ascp DT CopieEmpire LalouPas encore d'évaluation
- Atterrissage Et Decollage Robuste Dun Helicoptere Standard Par Les Techniques Mode Glissant Et BacksteppingDocument8 pagesAtterrissage Et Decollage Robuste Dun Helicoptere Standard Par Les Techniques Mode Glissant Et BacksteppingWalidAdrarPas encore d'évaluation
- Suspensions ExercicesDocument8 pagesSuspensions ExercicesvaleriudraganymailcoPas encore d'évaluation
- Bridage A Rampe Genius SuDocument14 pagesBridage A Rampe Genius SuSaber HamdiPas encore d'évaluation
- 2022 MP SI MinesPonts SDocument26 pages2022 MP SI MinesPonts Sleobrut28Pas encore d'évaluation
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- Comp Mec4270Document27 pagesComp Mec4270Abderrahman AissatiPas encore d'évaluation
- TP AF PiloteTP32Document3 pagesTP AF PiloteTP32Monsieur PRIMEPas encore d'évaluation
- DRS1 - Contrat de Phase - Exemple 1Document7 pagesDRS1 - Contrat de Phase - Exemple 1Amina GhaziiPas encore d'évaluation
- Cours Embrayage FreinDocument72 pagesCours Embrayage FreinFatnassi BéchirPas encore d'évaluation
- 020 - Commandes de VolDocument14 pages020 - Commandes de Voladelinho13Pas encore d'évaluation
- Stabilisation D'un Drone Quadrirotor: Tipe 2021: Enjeux SociétauxDocument33 pagesStabilisation D'un Drone Quadrirotor: Tipe 2021: Enjeux SociétauxMohamed AssissPas encore d'évaluation
- TD Schema Blocs Servocommande AvionDocument4 pagesTD Schema Blocs Servocommande AvionAbdou HamaouiPas encore d'évaluation
- Détection de Contour Par Un Ar. DroneDocument23 pagesDétection de Contour Par Un Ar. DroneAchraf elouerghi100% (1)
- 4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFDocument24 pages4813 Epreuve E4 Bts Mci Session 2014 Pages 1 22 PDFMed Ali MaatougPas encore d'évaluation
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Pieuvre Fonctionnelle3Document1 pagePieuvre Fonctionnelle3Abderrazak MiassarPas encore d'évaluation
- BV ExDocument4 pagesBV ExAbderrazak MiassarPas encore d'évaluation
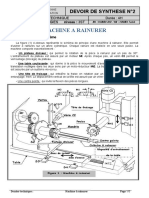
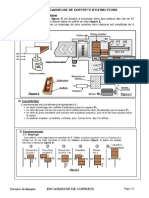
- Devoir de Synthèse N°2 Avec Correction - Génie Mécanique - Encaisseuse de Coffrets D'extincteurs - Bac Technique (2019-2020) MR MUSTAPHA BEN AMMARDocument5 pagesDevoir de Synthèse N°2 Avec Correction - Génie Mécanique - Encaisseuse de Coffrets D'extincteurs - Bac Technique (2019-2020) MR MUSTAPHA BEN AMMARAbderrazak MiassarPas encore d'évaluation
- Prep Brevet Pousse SeringueDocument3 pagesPrep Brevet Pousse SeringueAbderrazak MiassarPas encore d'évaluation
- Dessin D Ensemble Reducteur Limiteur de Couple CouleurDocument1 pageDessin D Ensemble Reducteur Limiteur de Couple CouleurAbderrazak MiassarPas encore d'évaluation
- TD N°5 Exos ComplémentairesDocument4 pagesTD N°5 Exos ComplémentairesAbderrazak MiassarPas encore d'évaluation
- Essuie TP21A2 1Document3 pagesEssuie TP21A2 1Abderrazak MiassarPas encore d'évaluation
- Le Fraisage en RoulantDocument13 pagesLe Fraisage en RoulantAbderrazak MiassarPas encore d'évaluation
- Les Définitions Des Principales Opérations de TournageDocument9 pagesLes Définitions Des Principales Opérations de TournageAbderrazak MiassarPas encore d'évaluation
- Parametre Lies MotifDocument2 pagesParametre Lies MotifAbderrazak MiassarPas encore d'évaluation
- Forod 1bac Si s1 1Document4 pagesForod 1bac Si s1 1Abderrazak MiassarPas encore d'évaluation
- F121 Organ Fil Cotation FoncDocument2 pagesF121 Organ Fil Cotation FoncAbderrazak MiassarPas encore d'évaluation
- Vocabulaire Technique Des Formes - Sciences de L'ingénieurDocument3 pagesVocabulaire Technique Des Formes - Sciences de L'ingénieurAbderrazak MiassarPas encore d'évaluation
- AlésageDocument12 pagesAlésageAbderrazak Miassar0% (1)
- La Rectification Cylindrique Et ConiqueDocument9 pagesLa Rectification Cylindrique Et ConiqueAbderrazak MiassarPas encore d'évaluation
- Rattrapage BAC 2019 Sciences de Lingénieur STMDocument11 pagesRattrapage BAC 2019 Sciences de Lingénieur STMAbderrazak MiassarPas encore d'évaluation
- DT2 Schema CinematiqueDocument1 pageDT2 Schema CinematiqueAbderrazak MiassarPas encore d'évaluation
- Étude de Quelques Temps TechnologiquesDocument5 pagesÉtude de Quelques Temps TechnologiquesAbderrazak MiassarPas encore d'évaluation
- Unité de Bouchonnage de FlaconsDocument4 pagesUnité de Bouchonnage de FlaconsAbderrazak MiassarPas encore d'évaluation
- Relais PDFDocument4 pagesRelais PDFAbderrazak MiassarPas encore d'évaluation
- Bascule CRDocument5 pagesBascule CRAbderrazak MiassarPas encore d'évaluation
- Etats de SurfaceDocument4 pagesEtats de SurfaceAbderrazak MiassarPas encore d'évaluation
- Station de PompageDocument5 pagesStation de PompageAbderrazak MiassarPas encore d'évaluation
- VARIATEURDocument5 pagesVARIATEURAbderrazak MiassarPas encore d'évaluation
- Les Moteurs À Courant Continu de Faible Puissance CablageDocument2 pagesLes Moteurs À Courant Continu de Faible Puissance CablageAbderrazak MiassarPas encore d'évaluation
- Système de RégulationDocument3 pagesSystème de RégulationEmmanuelPas encore d'évaluation
- Chapitre 1 Systemes EmbarquésDocument12 pagesChapitre 1 Systemes EmbarquésBrondon PagouPas encore d'évaluation
- Bac S Sciences de L Ingenieur Si Nouvelle Caledonie 2009 SujetDocument34 pagesBac S Sciences de L Ingenieur Si Nouvelle Caledonie 2009 SujetAbderrazak MiassarPas encore d'évaluation
- Insa Projet ThsaDocument157 pagesInsa Projet ThsaYoussef KhaliPas encore d'évaluation
- 080 - Mecanique Du Vol Part 3 PDFDocument68 pages080 - Mecanique Du Vol Part 3 PDFSophian ArixiPas encore d'évaluation
- Tuto FSUIPCDocument9 pagesTuto FSUIPCSabrina JeromePas encore d'évaluation
- 2.1 Aerodynamique Fini 2ppfDocument21 pages2.1 Aerodynamique Fini 2ppfSonia GonzalezPas encore d'évaluation
- Connaissance Des Aeronefs-V4PDocument46 pagesConnaissance Des Aeronefs-V4Pgumer31100% (2)
- TD Schema Blocs Servocommande AvionDocument4 pagesTD Schema Blocs Servocommande AvionAbdou HamaouiPas encore d'évaluation
- TD05Document0 pageTD05NeoXana01Pas encore d'évaluation
- Cours de Rafraîchissement Pour TNA/O: Décollage Avec Équipements InopérantsDocument76 pagesCours de Rafraîchissement Pour TNA/O: Décollage Avec Équipements InopérantsHani BoudiafPas encore d'évaluation
- HandbuchTrikefr-4 Kontroliert-1Document30 pagesHandbuchTrikefr-4 Kontroliert-1usstbPas encore d'évaluation
- Constitution Des Aeronefs PolycopeDocument16 pagesConstitution Des Aeronefs PolycopeYassine AboulhodaPas encore d'évaluation
- Présentation Du Travail Effectué Dans Le Projet de Conception Des Mécanismes Du Controle D'un DroneDocument41 pagesPrésentation Du Travail Effectué Dans Le Projet de Conception Des Mécanismes Du Controle D'un DroneSamira SahraouiPas encore d'évaluation
- EmpennagesDocument18 pagesEmpennagesbochra jarhdouraPas encore d'évaluation
- Manuel Preparation BIADocument230 pagesManuel Preparation BIAAyoub Dafir100% (1)
- Comment Vole Un AvionDocument35 pagesComment Vole Un AvionDEFFODJIPas encore d'évaluation
- Manuel BIA CIRAS Toulouse Aerodynamique Mecavol Spatial 1025350Document46 pagesManuel BIA CIRAS Toulouse Aerodynamique Mecavol Spatial 1025350bella loutfiPas encore d'évaluation
- Hypersustantateur Et Train DatterrissageDocument9 pagesHypersustantateur Et Train Datterrissageni komekPas encore d'évaluation
- Aérodynamique CompletDocument7 pagesAérodynamique CompletaymenPas encore d'évaluation
- 2 Connaissances Des Aéronefs KITCHENER Bia Caen (6) AMCADocument91 pages2 Connaissances Des Aéronefs KITCHENER Bia Caen (6) AMCAMohamed ElbaghdadiPas encore d'évaluation
- 11Document19 pages11maro imyPas encore d'évaluation
- MPSI C2 Chap3 TD4 FONCTION DE TRANSFERTDocument5 pagesMPSI C2 Chap3 TD4 FONCTION DE TRANSFERTmewguv Ahmed salekPas encore d'évaluation
- Théorie Du VolDocument22 pagesThéorie Du VolAli ElmahaouiPas encore d'évaluation
- Pcsi1 Kerichendownloadid 4991Document9 pagesPcsi1 Kerichendownloadid 4991Alexandre MinviellePas encore d'évaluation
- Aerodynamique de BaseDocument53 pagesAerodynamique de BaseAli ElmahaouiPas encore d'évaluation
- NTM PNC 2022 PDFDocument109 pagesNTM PNC 2022 PDFAnis dalhoumiPas encore d'évaluation
- Connaissance Avion Tome 1Document62 pagesConnaissance Avion Tome 1John JohnPas encore d'évaluation
- Iei AerotechDocument39 pagesIei AerotechCissPas encore d'évaluation