Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Cinematique GraphiqueDocument3 pagesCinematique GraphiqueFlorianbrutus100% (1)
- CH 5 Circuits Lineaires en Regime Sinusoidal MonophaseDocument17 pagesCH 5 Circuits Lineaires en Regime Sinusoidal Monophasekonan ezekielPas encore d'évaluation
- Construction de Fresnel.Document4 pagesConstruction de Fresnel.1youb tvPas encore d'évaluation
- M2103 - TD3 - CinématiqueDocument4 pagesM2103 - TD3 - CinématiqueClément DuvalPas encore d'évaluation
- 115 - Exercices - Dessin - Embrayage-Frein (Solution) PDFDocument5 pages115 - Exercices - Dessin - Embrayage-Frein (Solution) PDFOuattara EdmondPas encore d'évaluation
- Cours Modelisation Des Liaisons PRDocument4 pagesCours Modelisation Des Liaisons PRAgriIT •Pas encore d'évaluation
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- 03 Cours Le Schema CinematiqueDocument7 pages03 Cours Le Schema CinematiqueMohammed El azhariPas encore d'évaluation
- Normale Corigé 2012 PDFDocument8 pagesNormale Corigé 2012 PDFGuiliassPas encore d'évaluation
- Etau de BricolageDocument2 pagesEtau de BricolagehamrouniPas encore d'évaluation
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- Exercice Equiprojectivit Machine Crire LveDocument3 pagesExercice Equiprojectivit Machine Crire Lvespectrum66Pas encore d'évaluation
- Principe Fondamental de La StatiqueDocument10 pagesPrincipe Fondamental de La StatiqueGYPAETEPas encore d'évaluation
- Travaux DirigesDocument32 pagesTravaux Dirigestarik outalPas encore d'évaluation
- Schéma CinématiqueDocument22 pagesSchéma CinématiquemohamedPas encore d'évaluation
- STI BE - Guidage en RotationDocument14 pagesSTI BE - Guidage en Rotationmeoh eezaPas encore d'évaluation
- Examens National 2bac Sci Genieur SMB 2016 R PDFDocument26 pagesExamens National 2bac Sci Genieur SMB 2016 R PDFHanane TounsiPas encore d'évaluation
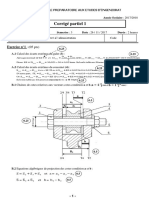
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
- 02-Exo Schema Cinemat PerforatriceDocument2 pages02-Exo Schema Cinemat PerforatriceMohsen SaidiPas encore d'évaluation
- Résumé de TransmissionDocument3 pagesRésumé de TransmissionHafida EnnajiPas encore d'évaluation
- Ci5 TD Mecanisme CameDocument1 pageCi5 TD Mecanisme Cameleroy makita loubakiPas encore d'évaluation
- 05 - PFS TDDocument6 pages05 - PFS TDJean Jules Badiang100% (1)
- CC1 - Octobre 2019-Touret - Meuler 2STE1Document4 pagesCC1 - Octobre 2019-Touret - Meuler 2STE1ESSOME ESSOME OLIVIER STEPHANE100% (1)
- td3 Ci1 Capteur CorDocument4 pagestd3 Ci1 Capteur CorbecemPas encore d'évaluation
- Liaisons MécaniquesDocument4 pagesLiaisons MécaniquesRhô ThalesPas encore d'évaluation
- Verin Simple Effet ExerciceDocument2 pagesVerin Simple Effet ExerciceSoumeya MachtaPas encore d'évaluation
- Correction de L - Etau Du ModelisteDocument4 pagesCorrection de L - Etau Du ModelisteHiba NacirPas encore d'évaluation
- CC1 Ie1 18 19Document1 pageCC1 Ie1 18 19Hamza RimiPas encore d'évaluation
- TP GuimaDocument3 pagesTP GuimaKamel BousninaPas encore d'évaluation
- TD CinematiqueDocument5 pagesTD Cinematiquebenchara100% (1)
- Chapitre 2 - Le Régime SinusoïdalDocument4 pagesChapitre 2 - Le Régime SinusoïdalBeatrice Florin100% (1)
- Ch3 Régime SinusoïdalDocument23 pagesCh3 Régime SinusoïdalHamza NajarPas encore d'évaluation
- (Cin) (TD) Centrifugeuse HumaineDocument5 pages(Cin) (TD) Centrifugeuse HumaineElbatouri Badr EddinePas encore d'évaluation
- Touret A Meuler Corrige PDFDocument2 pagesTouret A Meuler Corrige PDFMohamed Soibaha ChaambanePas encore d'évaluation
- Chapitre 7 - Association de Dipôles en SérieDocument2 pagesChapitre 7 - Association de Dipôles en SérieBeatrice Florin100% (2)
- Exercice Schema CinematiqueDocument4 pagesExercice Schema CinematiqueNeji Hmani100% (2)
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- Serie9 Asservissement PDFDocument8 pagesSerie9 Asservissement PDFHichem HamdiPas encore d'évaluation
- Cinématique 2022Document51 pagesCinématique 2022said houmairiPas encore d'évaluation
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsPas encore d'évaluation
- Liaison & Schématisation (Schéma Cinématique)Document14 pagesLiaison & Schématisation (Schéma Cinématique)Ben Saber RahiimPas encore d'évaluation
- Chapitre 3-Reseau Triphase PDFDocument21 pagesChapitre 3-Reseau Triphase PDFAE07Pas encore d'évaluation
- Application 3 Moto Compresseur D Air A Piston PDFDocument10 pagesApplication 3 Moto Compresseur D Air A Piston PDFHajar NhailaPas encore d'évaluation
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A Petrolesallsmart100% (1)
- TD de Mecanique Generale ISET Nabeul L1Document18 pagesTD de Mecanique Generale ISET Nabeul L1Adel ZitouniPas encore d'évaluation
- 02 - Torseur Statique Mode de CompatibiliteDocument20 pages02 - Torseur Statique Mode de CompatibiliteAmina DinariPas encore d'évaluation
- Treuil Sujet Et CorrigeDocument3 pagesTreuil Sujet Et CorrigeThierry OUAMBO FOTSOPas encore d'évaluation
- Exercice Engrenages eDocument3 pagesExercice Engrenages eakou100% (1)
- Exercice Chape Dessin CoteDocument2 pagesExercice Chape Dessin CoteABDELHAKIMPas encore d'évaluation
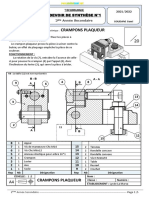
- Crampons Plaqueur: Devoir de Synthèse N°1Document6 pagesCrampons Plaqueur: Devoir de Synthèse N°1Nadia SahliPas encore d'évaluation
- FC05b Statique GraphiqueDocument7 pagesFC05b Statique Graphiquepouvoir Koussou100% (1)
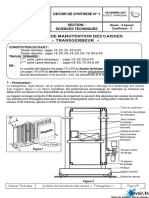
- Devoir de Synthèse N°1 2007 2008 (Région Kairouan)Document15 pagesDevoir de Synthèse N°1 2007 2008 (Région Kairouan)Piere Ebrahim50% (2)
- A4 EE Et MA Mini Etau de Serrage 1Document3 pagesA4 EE Et MA Mini Etau de Serrage 1Rodolphe Sounou67% (3)
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- TP Eprouvette de Traction en PLADocument4 pagesTP Eprouvette de Traction en PLAcecePas encore d'évaluation
- Exercices Descentes de ChargesDocument12 pagesExercices Descentes de Chargescece100% (1)
- Cinématique Analytique: Mouvement de Translation Rectiligne UniformeDocument4 pagesCinématique Analytique: Mouvement de Translation Rectiligne UniformececePas encore d'évaluation
- Cours Descente de ChargeDocument9 pagesCours Descente de ChargececePas encore d'évaluation
- Dictionnaire Visuel Bilingue Français Anglais - Lexique Mathématiques 163-165 PDFDocument3 pagesDictionnaire Visuel Bilingue Français Anglais - Lexique Mathématiques 163-165 PDFJérémy50% (2)
- Exercices Triangle Rectangle Et Cercle 2college 4Document1 pageExercices Triangle Rectangle Et Cercle 2college 4brencessedorestan93Pas encore d'évaluation
- Symetries PDFDocument4 pagesSymetries PDFBrenton MorrisonPas encore d'évaluation
- ch6 PLANIMETRIEDocument9 pagesch6 PLANIMETRIEroycunPas encore d'évaluation
- Formules D'Aires Et de VolumesDocument2 pagesFormules D'Aires Et de VolumesAbdelwahed El OuafiPas encore d'évaluation
- Plan Cours 5Document3 pagesPlan Cours 5fangatauPas encore d'évaluation
- COURS de DESSIN INDUSTRIEL (Enregistrement Automatique)Document203 pagesCOURS de DESSIN INDUSTRIEL (Enregistrement Automatique)Naoual BelaghzalPas encore d'évaluation
- CMR BSDocument65 pagesCMR BSatanasesumailiPas encore d'évaluation
- F 2 CosDocument1 pageF 2 CosKL TpkosPas encore d'évaluation
- Chap1-Symétrie CentraleDocument9 pagesChap1-Symétrie Centralenaababaongo052Pas encore d'évaluation
- 3ch7 Géométrie Dans Lespace4Document9 pages3ch7 Géométrie Dans Lespace4Abdel DaaPas encore d'évaluation
- Brevet Blanc2 Mars A23Document6 pagesBrevet Blanc2 Mars A23ClarissePas encore d'évaluation
- EB9 ExamenDocument2 pagesEB9 ExamenAyman Hussein AyachPas encore d'évaluation
- EspaceTS1 PDFDocument9 pagesEspaceTS1 PDFAli RammalPas encore d'évaluation
- TMB CM3 GeometrieDocument4 pagesTMB CM3 GeometriemakaldaalbaPas encore d'évaluation
- Magazine 6 - Nombres Complexes (Suite)Document8 pagesMagazine 6 - Nombres Complexes (Suite)nabilPas encore d'évaluation
- coursRC 3newDocument27 pagescoursRC 3newMiskine FilsPas encore d'évaluation
- 3 Exercices de Brevet Trigo CorrigesDocument4 pages3 Exercices de Brevet Trigo CorrigesSokhna penda Kane100% (1)
- Trigonometrie 4Document1 pageTrigonometrie 4Sarah SalmiPas encore d'évaluation
- Content Uploaded by Mamadou Sadio NdongoDocument26 pagesContent Uploaded by Mamadou Sadio NdongoStéphacePas encore d'évaluation
- DevoirDocument2 pagesDevoirtalalPas encore d'évaluation
- Poster Formes GeometriquesDocument2 pagesPoster Formes GeometriquesShakirPas encore d'évaluation
- DS Quadrilatères Et ProbasDocument2 pagesDS Quadrilatères Et ProbasrachasrourPas encore d'évaluation
- Ce2 Evaluation PolygonesDocument2 pagesCe2 Evaluation Polygonesrodep36591Pas encore d'évaluation
- 2g4 Ex2aDocument1 page2g4 Ex2aAkpo ArmandPas encore d'évaluation
- Mesure Des Angles Verticaux Et Horizontaux PDFDocument2 pagesMesure Des Angles Verticaux Et Horizontaux PDFyassinemhedhbi123Pas encore d'évaluation
- Exercice d’Entraînement 1 Géométrie Dans l’EspaceDocument1 pageExercice d’Entraînement 1 Géométrie Dans l’EspaceSoufiane KhaddadiPas encore d'évaluation
- Chap 04 - Ex 3 - Applications Simples - CORRIGEDocument3 pagesChap 04 - Ex 3 - Applications Simples - CORRIGEBruno BissyPas encore d'évaluation
- Coude ConiqueDocument3 pagesCoude ConiqueCabrel SanouPas encore d'évaluation