Vous aimerez peut-être aussi
- Chap1.Methodes DirectesDocument25 pagesChap1.Methodes DirectesBoughachich MalekPas encore d'évaluation
- Cours Methode NumeriqueDocument3 pagesCours Methode Numeriquemlmlml Douna7Pas encore d'évaluation
- Chapitre 2 - Analyse NumériqueDocument10 pagesChapitre 2 - Analyse Numériquechihabhamaz19Pas encore d'évaluation
- Déterminants ClassiquesDocument5 pagesDéterminants ClassiquesMouad Aguëro100% (1)
- Chapitre2 Calcul MatricielDocument20 pagesChapitre2 Calcul Matricielsalma azibPas encore d'évaluation
- Chap - 4 - MatricesDocument16 pagesChap - 4 - MatricesMohamedPas encore d'évaluation
- TP1 SelDocument4 pagesTP1 Selmajed.smichiPas encore d'évaluation
- Cours 2Document4 pagesCours 2YOUNESS ALAOUUIPas encore d'évaluation
- Memo Matrices PDFDocument2 pagesMemo Matrices PDFTomPas encore d'évaluation
- Matrices 4 MultiplicationproprietesDocument7 pagesMatrices 4 MultiplicationproprietesAnahi MaâroufPas encore d'évaluation
- Gauss Chofo PDFDocument8 pagesGauss Chofo PDFAE07Pas encore d'évaluation
- Resume 21 MatricesDocument3 pagesResume 21 MatricesimadPas encore d'évaluation
- Serie 02Document5 pagesSerie 02houssemPas encore d'évaluation
- Cours Matrices2023-1Document28 pagesCours Matrices2023-1Sara OukzazPas encore d'évaluation
- Chapitre 2Document56 pagesChapitre 2123456789Pas encore d'évaluation
- Cours Algèbre S2 LF Eco-GesDocument71 pagesCours Algèbre S2 LF Eco-GesHamza HanebaliPas encore d'évaluation
- Cours D'optimisationDocument53 pagesCours D'optimisationTerkia AitPas encore d'évaluation
- Calcul MatricielDocument14 pagesCalcul MatricielMed RhaiouzPas encore d'évaluation
- Support3 15-16Document37 pagesSupport3 15-16Hafide ZnPas encore d'évaluation
- ControleAut19 PDFDocument3 pagesControleAut19 PDFazzamPas encore d'évaluation
- Calcul MatricielDocument13 pagesCalcul MatricielSyryne DridiPas encore d'évaluation
- Matrices Bis Alg1 Cour7 2020 2021Document10 pagesMatrices Bis Alg1 Cour7 2020 2021hachioPas encore d'évaluation
- Déterminants PDFDocument2 pagesDéterminants PDFyoussef niglorya100% (1)
- SMPC2 - El Mehdi BoubaDocument58 pagesSMPC2 - El Mehdi BoubaAbdelbasset EttabitPas encore d'évaluation
- Cours AlgebreLineaire LBGC TailleferDocument36 pagesCours AlgebreLineaire LBGC TailleferNouraPas encore d'évaluation
- Déterminants de Vandermonde Et de CauchyDocument6 pagesDéterminants de Vandermonde Et de CauchyMoad MalmiPas encore d'évaluation
- Calcul de DeterminantDocument4 pagesCalcul de DeterminantMoad MalmiPas encore d'évaluation
- Cours Algèbre Linéaire S2Document31 pagesCours Algèbre Linéaire S2youssef benzinaPas encore d'évaluation
- Chap1Document20 pagesChap1tagouagniaeudesPas encore d'évaluation
- MA5 DeterDocument15 pagesMA5 DeterHedi cherifPas encore d'évaluation
- Correction Exam 2017Document13 pagesCorrection Exam 2017Escanor BanPas encore d'évaluation
- Chapitre 3-Matrices - Cours Algèbre 2-LEA1!22!23-TraikiDocument12 pagesChapitre 3-Matrices - Cours Algèbre 2-LEA1!22!23-Traikimaymoun jabnouniPas encore d'évaluation
- Chapitre 3 (Partie I) - Calcul MatricielDocument7 pagesChapitre 3 (Partie I) - Calcul Matricielmoh koubaPas encore d'évaluation
- Resume MatriceDocument11 pagesResume MatriceprotoPas encore d'évaluation
- TD Ev4 PDFDocument2 pagesTD Ev4 PDFMohamed OuaggaPas encore d'évaluation
- CorrectionDocument5 pagesCorrectionAssia BourtiPas encore d'évaluation
- CHAP2 Resolution Systemes LineairesDocument24 pagesCHAP2 Resolution Systemes LineairesBilal Bouakrif100% (1)
- Résolution Numérique Des Systèmes LinéairesDocument20 pagesRésolution Numérique Des Systèmes LinéairesedrissiadnanePas encore d'évaluation
- Méthode ItérativesDocument14 pagesMéthode Itérativessomaya ehPas encore d'évaluation
- Cours Matrices VprofDocument11 pagesCours Matrices VprofNicolas SEMANAZPas encore d'évaluation
- MatricesDocument17 pagesMatricesAMEZIANE MOHAMEDPas encore d'évaluation
- DM 16Document3 pagesDM 16mehdi benmassoudPas encore d'évaluation
- Chap 1 Lignes, Colonnes, MatricesDocument3 pagesChap 1 Lignes, Colonnes, MatricesbayebiramaniassePas encore d'évaluation
- Chapitre 1 - Analyse Numérique - 2023-2024Document13 pagesChapitre 1 - Analyse Numérique - 2023-2024chihabhamaz19Pas encore d'évaluation
- CH3 Eq LinDocument17 pagesCH3 Eq LinceczczcPas encore d'évaluation
- CMN Chap2Document48 pagesCMN Chap2Sal MaPas encore d'évaluation
- Deter Min Ante NoDocument5 pagesDeter Min Ante NoJalal AlouiatPas encore d'évaluation
- Chapitre 3 - (Partie 1)Document6 pagesChapitre 3 - (Partie 1)hawhawPas encore d'évaluation
- 35 Determinants PlancheDocument3 pages35 Determinants PlancheBezara AnicéPas encore d'évaluation
- Chapitre 2Document13 pagesChapitre 2الزهراء فاطمةPas encore d'évaluation
- Centrale Supelec MP 2019 Maths 1 CorrigeDocument14 pagesCentrale Supelec MP 2019 Maths 1 CorrigeMartin MaurerPas encore d'évaluation
- V Determinant CirculantDocument1 pageV Determinant CirculantMoustakimPas encore d'évaluation
- Exo S Reduction Des EndomorphismesDocument4 pagesExo S Reduction Des EndomorphismesLOUEMBET BourgetPas encore d'évaluation
- Fasc-Cours3 MathDocument9 pagesFasc-Cours3 MathJudicaël SekaPas encore d'évaluation
- M PT DET JMF 4Document5 pagesM PT DET JMF 4frederic sateraPas encore d'évaluation
- Les Déterminants PDFDocument8 pagesLes Déterminants PDFHaze ThompsonPas encore d'évaluation
- Correction DS 2018Document3 pagesCorrection DS 2018Adem DhokarPas encore d'évaluation
- M de JacobiDocument22 pagesM de Jacobialaa chamsiPas encore d'évaluation
- Réalisez de Beaux Graphiques Avec Seaborn - Découvrez Les Librairies Python Pour La Data ScienceDocument8 pagesRéalisez de Beaux Graphiques Avec Seaborn - Découvrez Les Librairies Python Pour La Data ScienceDANHOUNDO RÉMIPas encore d'évaluation
- Passez de Numpy À Pandas - Découvrez Les Librairies Python Pour La Data ScienceDocument12 pagesPassez de Numpy À Pandas - Découvrez Les Librairies Python Pour La Data ScienceDANHOUNDO RÉMIPas encore d'évaluation
- Etudes 39Document4 pagesEtudes 39DANHOUNDO RÉMIPas encore d'évaluation
- Plongez en Détail Dans La Librairie NumPy - Découvrez Les Librairies Python Pour La Data ScienceDocument11 pagesPlongez en Détail Dans La Librairie NumPy - Découvrez Les Librairies Python Pour La Data ScienceDANHOUNDO RÉMIPas encore d'évaluation
- Maîtrisez Les Possibilités Offertes Par Matplotlib - Découvrez Les Librairies Python Pour La Data ScienceDocument10 pagesMaîtrisez Les Possibilités Offertes Par Matplotlib - Découvrez Les Librairies Python Pour La Data ScienceDANHOUNDO RÉMIPas encore d'évaluation
- Reof 091 0235Document36 pagesReof 091 0235Bennaceur ThamiPas encore d'évaluation
- Graphique Temporel Ggplot2Document7 pagesGraphique Temporel Ggplot2DANHOUNDO RÉMIPas encore d'évaluation
- Partie 4 - OpenClassrooms qUIZ3Document6 pagesPartie 4 - OpenClassrooms qUIZ3DANHOUNDO RÉMIPas encore d'évaluation
- Comprenez Les Variations SaisonnièresDocument4 pagesComprenez Les Variations SaisonnièresDANHOUNDO RÉMIPas encore d'évaluation
- Découvrez L'univers Des Données TemporellesDocument4 pagesDécouvrez L'univers Des Données TemporellesDANHOUNDO RÉMIPas encore d'évaluation
- TP - Désaisonnalisez À L'aide de La Régression LinéaireDocument6 pagesTP - Désaisonnalisez À L'aide de La Régression LinéaireDANHOUNDO RÉMIPas encore d'évaluation
- Désaisonnalisez À L'aide Des Moyennes MobilesDocument6 pagesDésaisonnalisez À L'aide Des Moyennes MobilesDANHOUNDO RÉMIPas encore d'évaluation
- Partie 3 - OpenClassrooms Quiz 2Document7 pagesPartie 3 - OpenClassrooms Quiz 2DANHOUNDO RÉMIPas encore d'évaluation
- Insee Flash Champagne-Ardenne Exercice Partie 1Document4 pagesInsee Flash Champagne-Ardenne Exercice Partie 1DANHOUNDO RÉMIPas encore d'évaluation
- Rapport FinalcontrolecDocument92 pagesRapport FinalcontrolecDANHOUNDO RÉMIPas encore d'évaluation
- Découvrez Des Algorithmes de Traitement Des Moyennes MobilesDocument8 pagesDécouvrez Des Algorithmes de Traitement Des Moyennes MobilesDANHOUNDO RÉMIPas encore d'évaluation
- Rapport Evaluation Globale Ce PED1Document104 pagesRapport Evaluation Globale Ce PED1DANHOUNDO RÉMIPas encore d'évaluation
- EvaluationfinaleduPCA UNICEFBenin2019 RapportDocument70 pagesEvaluationfinaleduPCA UNICEFBenin2019 RapportDANHOUNDO RÉMIPas encore d'évaluation
- Compléments Du Cours Et Exercices Corrigés (AR-MA-ARMA-ARIMA) Doc021Document16 pagesCompléments Du Cours Et Exercices Corrigés (AR-MA-ARMA-ARIMA) Doc021DANHOUNDO RÉMIPas encore d'évaluation
- Communication A La Commission Des Finances de L'Assemblee NationaleDocument93 pagesCommunication A La Commission Des Finances de L'Assemblee NationaleDANHOUNDO RÉMIPas encore d'évaluation
- Rapport Evaluation PNE1Document88 pagesRapport Evaluation PNE1DANHOUNDO RÉMIPas encore d'évaluation
- Exercises Applications Linéaires, Matrices, DéterminantsDocument18 pagesExercises Applications Linéaires, Matrices, DéterminantsDANHOUNDO RÉMI100% (1)
- Corriges Espaces VectorielsDocument31 pagesCorriges Espaces VectorielsDANHOUNDO RÉMIPas encore d'évaluation
- Rapportfinal EvaluationPNSUCEP 24092019-CompresseDocument138 pagesRapportfinal EvaluationPNSUCEP 24092019-CompresseDANHOUNDO RÉMIPas encore d'évaluation
- Exercices Espaces VectorielsDocument6 pagesExercices Espaces VectorielsDANHOUNDO RÉMIPas encore d'évaluation
- PReFA-EI Formulairedecandidature1Document7 pagesPReFA-EI Formulairedecandidature1DANHOUNDO RÉMIPas encore d'évaluation
- Partie 1 de Cours - MatriceDocument15 pagesPartie 1 de Cours - MatriceDANHOUNDO RÉMIPas encore d'évaluation
- Insecurite Alimentaire - PSN - 2011Document137 pagesInsecurite Alimentaire - PSN - 2011DANHOUNDO RÉMIPas encore d'évaluation
- Hygiene Et Assainissement Au Benin - PSN2012Document131 pagesHygiene Et Assainissement Au Benin - PSN2012DANHOUNDO RÉMIPas encore d'évaluation
- Config SwitchDocument62 pagesConfig Switchben issa ilyes100% (1)
- Règlement - Grand Jeu Concert U2 Las VegasDocument4 pagesRèglement - Grand Jeu Concert U2 Las VegasMatira Millard-Min ChiuPas encore d'évaluation
- Ecrire Un Roman PDFDocument28 pagesEcrire Un Roman PDFyves marie gustavePas encore d'évaluation
- Tp-1-Procedures en MysqlDocument1 pageTp-1-Procedures en MysqlaimranedrPas encore d'évaluation
- Pragmatique - Objet DetudeDocument40 pagesPragmatique - Objet DetudeViktoria DulgherPas encore d'évaluation
- Charte Éditoriale JAM Oct 2022Document17 pagesCharte Éditoriale JAM Oct 2022Tristan GiordanoPas encore d'évaluation
- Metaphore Conte Histoire Psychotherapie Hypnotherapie Hypnose Jean Touati OrgadiaDocument6 pagesMetaphore Conte Histoire Psychotherapie Hypnotherapie Hypnose Jean Touati OrgadiaPatrick DescoubèsPas encore d'évaluation
- Le Point HS N°24 - La Franc-MaçonnerieDocument132 pagesLe Point HS N°24 - La Franc-Maçonnerieibrahima guissé100% (1)
- 249 Outils D'intelligence ArtificielleDocument17 pages249 Outils D'intelligence ArtificielleSethPas encore d'évaluation
- LecturesuivieDocument12 pagesLecturesuivieAboukikiss KikissPas encore d'évaluation
- 04 - Lavender Town - Full ScoreDocument1 page04 - Lavender Town - Full ScorecesarPas encore d'évaluation
- 2015 04 25 Chapitre 3 Les Scriptes PL-SQLDocument13 pages2015 04 25 Chapitre 3 Les Scriptes PL-SQLAnonh AdikoPas encore d'évaluation
- Fiche Analyse ThéâtreDocument2 pagesFiche Analyse ThéâtreRosel YlaPas encore d'évaluation
- Devoir Informatique TheoriqueDocument2 pagesDevoir Informatique TheoriqueJorge D. Nontol0% (1)
- La Vie, Les Désirs, Les Conseils Les Emplois Du SubjonctifDocument13 pagesLa Vie, Les Désirs, Les Conseils Les Emplois Du SubjonctifvkdyenthanhPas encore d'évaluation
- G7Eval Les Complements Circonstanciels PDFDocument2 pagesG7Eval Les Complements Circonstanciels PDFMimi Diamand100% (1)
- Petit Traite Du Mentaliste HumanisteDocument18 pagesPetit Traite Du Mentaliste HumanisteRoxana100% (4)
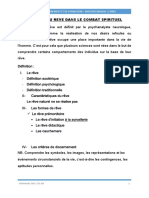
- Les Reves Dans Le Combat Spirituel Comment Les InterpreterDocument6 pagesLes Reves Dans Le Combat Spirituel Comment Les Interpreterpaulin maissonPas encore d'évaluation
- UntitledDocument2 pagesUntitledbenhadjeba boumedyenPas encore d'évaluation
- Comment Rediger Un Compte Rendu de ReunionDocument10 pagesComment Rediger Un Compte Rendu de ReunionLongin Ateba100% (1)
- Théâtre - Exercices d'OLDocument6 pagesThéâtre - Exercices d'OLmartyludoPas encore d'évaluation
- Cours Application 1 Bac SMDocument5 pagesCours Application 1 Bac SMBassirou SeckPas encore d'évaluation
- Résumé Mouvement LittéraireDocument5 pagesRésumé Mouvement Littéraireantohol88Pas encore d'évaluation
- C N°2 B.A - Amina OumazighDocument5 pagesC N°2 B.A - Amina Oumazighggqgj56Pas encore d'évaluation
- Programmation Orientée Objet Par C++ Surdéfinition Des Opérateurs 2015-2016 PDFDocument5 pagesProgrammation Orientée Objet Par C++ Surdéfinition Des Opérateurs 2015-2016 PDFMeziane AchrafPas encore d'évaluation
- Saint Bernard. Oeuvres Complètes (Charpentier Trad.) - 1865. Volume 2.Document676 pagesSaint Bernard. Oeuvres Complètes (Charpentier Trad.) - 1865. Volume 2.Patrologia Latina, Graeca et Orientalis100% (1)
- Les Structures Anthropologiques de L'imaginaire (Gilbert Durand) (Z-Library)Document559 pagesLes Structures Anthropologiques de L'imaginaire (Gilbert Durand) (Z-Library)yadaPas encore d'évaluation
- Répartition de l_unité 1 - 5ème annéeDocument2 pagesRépartition de l_unité 1 - 5ème annéeaouadi.abir2Pas encore d'évaluation
- CA Alter Ego + 3Document12 pagesCA Alter Ego + 3Saéd Rbaba'a100% (1)
- (Cftmea) R - Cim10 PDFDocument2 pages(Cftmea) R - Cim10 PDFJean Baptiste DesPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Guide complet de la Numérologie: Édition 30e anniversaireD'EverandGuide complet de la Numérologie: Édition 30e anniversaireÉvaluation : 4 sur 5 étoiles4/5 (1)
- Je me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?D'EverandJe me prépare aux examens du ministère en mathématiques: Es-tu prêt à passer le test ?Évaluation : 4 sur 5 étoiles4/5 (1)