Vous aimerez peut-être aussi
- Chapitre-12 SERIE STATISTIQUE À 2 CARACTERES 2Document34 pagesChapitre-12 SERIE STATISTIQUE À 2 CARACTERES 2FULGENCE DIBIPas encore d'évaluation
- TDetTP 2Document118 pagesTDetTP 2MOUNIR HLALI100% (1)
- Méthode Gauss-SeidelDocument20 pagesMéthode Gauss-SeidelMed Amine Lahmer100% (1)
- CodageDocument22 pagesCodageladabd2Pas encore d'évaluation
- SMI5 2010 EtudiantsDocument27 pagesSMI5 2010 EtudiantsRfx Bzx100% (1)
- 2019 ML TD2 - CorrigeDocument4 pages2019 ML TD2 - Corrigezizou zouziPas encore d'évaluation
- Dichotomie PDFDocument4 pagesDichotomie PDFHabdoulaye KoudakidigaPas encore d'évaluation
- Corrige Complexité PDFDocument5 pagesCorrige Complexité PDFMOUNIR HLALIPas encore d'évaluation
- Calcul Des Valeurs Vecteurs Propres ResumeDocument48 pagesCalcul Des Valeurs Vecteurs Propres ResumeAS as0% (1)
- Exercices ProbabilitesDocument13 pagesExercices ProbabilitesOlivier Rack RoyalPas encore d'évaluation
- Deepmath - Mathématiques (Simples) Des Réseaux de Neurones (Pas Trop Compliqués) : Algorithmes Et MathématiquesDocument283 pagesDeepmath - Mathématiques (Simples) Des Réseaux de Neurones (Pas Trop Compliqués) : Algorithmes Et MathématiquesgilouPas encore d'évaluation
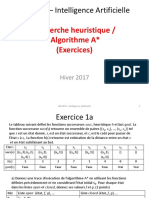
- 04 Recherche Heuristique - Ex1Document7 pages04 Recherche Heuristique - Ex1Souhaila Djaffal100% (1)
- Introduction À La Théorie Des Graphes: 1) OriginesDocument12 pagesIntroduction À La Théorie Des Graphes: 1) OriginesSwitch GangPas encore d'évaluation
- Feuilles1a8 Et AnnDocument22 pagesFeuilles1a8 Et Annmahdi AmmouPas encore d'évaluation
- td1 CorrDocument6 pagestd1 CorrOumeyma JouiniPas encore d'évaluation
- Les Algorithmes Gloutons: II.1 Une Résolution BruteDocument10 pagesLes Algorithmes Gloutons: II.1 Une Résolution BruteklaynPas encore d'évaluation
- Chapitre2 - Lois de Proba UsuellesDocument12 pagesChapitre2 - Lois de Proba UsuellesMussa Sn100% (1)
- C3 Resolution Systemes Lineaires Enrico NajiDocument73 pagesC3 Resolution Systemes Lineaires Enrico NajiHajarYazinePas encore d'évaluation
- Examen Avec Corrigé Proba-Stat - ING - 22-23Document5 pagesExamen Avec Corrigé Proba-Stat - ING - 22-23kernoumehdi17Pas encore d'évaluation
- Theorie Des Graphes Et Reseaux2021-Part1Document26 pagesTheorie Des Graphes Et Reseaux2021-Part1Thorece DonfackPas encore d'évaluation
- Correction Exercice3Document4 pagesCorrection Exercice3Achref NejiPas encore d'évaluation
- TD5 - LOGIQ COrrDocument4 pagesTD5 - LOGIQ COrrAmeni BoughanmiPas encore d'évaluation
- TD N°4-1Document13 pagesTD N°4-1Imad HakkachePas encore d'évaluation
- Td6 Processus CorrigeDocument9 pagesTd6 Processus CorrigeKhaireddine DardouriPas encore d'évaluation
- Cours de Compilation FDocument137 pagesCours de Compilation FouthmaneoudrhiriPas encore d'évaluation
- Calcul MatricielDocument44 pagesCalcul Matricielsabri rabiePas encore d'évaluation
- Séance 11-Problème À Satisfaction de ContrainteDocument45 pagesSéance 11-Problème À Satisfaction de ContrainteAbdallahi SidiPas encore d'évaluation
- CircombrevsolDocument9 pagesCircombrevsolrahma kaabi100% (1)
- L'implémentation de L'algorithme de Bellman-Ford Et Son Application 2Document17 pagesL'implémentation de L'algorithme de Bellman-Ford Et Son Application 2jeanogou83Pas encore d'évaluation
- Cours / TP Avec Octave: 1.1 Premi' Ere Utilisation D'octaveDocument5 pagesCours / TP Avec Octave: 1.1 Premi' Ere Utilisation D'octavejeabarretgmail.comPas encore d'évaluation
- Master - Exercices Corrigés CMDocument14 pagesMaster - Exercices Corrigés CMYOUSSEF SIYAHPas encore d'évaluation
- TD Calcul MatricielDocument2 pagesTD Calcul MatricielYassine BouslamaPas encore d'évaluation
- Syst Èmes D'Équations LinéairesDocument26 pagesSyst Èmes D'Équations LinéairesAdmi BraccPas encore d'évaluation
- TP1Document3 pagesTP1Chatiri AzizPas encore d'évaluation
- Opérations Sur Les Nombres FractionnairesDocument4 pagesOpérations Sur Les Nombres FractionnairesJeeerPas encore d'évaluation
- TD Conception Et Analyse de AlgorithmesDocument18 pagesTD Conception Et Analyse de Algorithmesfairahmal2024Pas encore d'évaluation
- Math F 207 Seance 4 CorrDocument7 pagesMath F 207 Seance 4 Corrbaddi_hPas encore d'évaluation
- TIA - Chap02 - Réseaux de Neurones Artificiels - NewDocument20 pagesTIA - Chap02 - Réseaux de Neurones Artificiels - NewNassr eddinePas encore d'évaluation
- Mi-Les Rseaux de Neurones Artificiels PDFDocument49 pagesMi-Les Rseaux de Neurones Artificiels PDFYouva H.APas encore d'évaluation
- Exam 201004 CorDocument6 pagesExam 201004 CorMarvis Nz100% (1)
- Examen 2022Document5 pagesExamen 2022Sara100% (1)
- 03 IA Heuristique BBDocument27 pages03 IA Heuristique BBIslam HaffiedPas encore d'évaluation
- Tableau de KarnaughDocument7 pagesTableau de KarnaughlakiPas encore d'évaluation
- Programmation C++ TD3Document2 pagesProgrammation C++ TD3Tinys000Pas encore d'évaluation
- L2 Stats Tds PlancheDocument14 pagesL2 Stats Tds PlancheAboubacrène Ag AhmadPas encore d'évaluation
- Serie N6 Equation Non Lin S2015Document2 pagesSerie N6 Equation Non Lin S2015azzamPas encore d'évaluation
- Ia TD1Document4 pagesIa TD1chaima ben ghorbalPas encore d'évaluation
- TP GnuplotDocument8 pagesTP GnuplotParadis FleurPas encore d'évaluation
- Calcul de Probabilités Et Analyses StatistiquesDocument30 pagesCalcul de Probabilités Et Analyses StatistiquesamonszPas encore d'évaluation
- Matricecor PDFDocument15 pagesMatricecor PDFothman okPas encore d'évaluation
- Math PDFDocument1 pageMath PDFZo ZoPas encore d'évaluation
- Exercices PythonDocument5 pagesExercices PythonZaynabPas encore d'évaluation
- Calcul Trigonometrique Serie D Exercices 2Document3 pagesCalcul Trigonometrique Serie D Exercices 2HALLOWEEN FFPas encore d'évaluation
- 7-Recherche OperationnelleDocument16 pages7-Recherche OperationnelleAbdou OuChPas encore d'évaluation
- Cours 1 Optimisation MultiobjectifDocument12 pagesCours 1 Optimisation MultiobjectifIlham TimadjerPas encore d'évaluation
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2D'EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Pas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- 4Document1 page4somaya ehPas encore d'évaluation
- PDF Pfe Charpente Metallique CompressDocument37 pagesPDF Pfe Charpente Metallique Compresssomaya ehPas encore d'évaluation
- PDF Le Flambement Et Le Deversement Des Pieces Metalliquespdf CompressDocument46 pagesPDF Le Flambement Et Le Deversement Des Pieces Metalliquespdf Compresssomaya ehPas encore d'évaluation
- 3Document1 page3somaya ehPas encore d'évaluation
- Mini ProjetDocument2 pagesMini Projetsomaya ehPas encore d'évaluation
- 1 BP GénéralitésDocument34 pages1 BP GénéralitésⵜⵇⵢⴻⴱPas encore d'évaluation
- Serie 4Document2 pagesSerie 4somaya ehPas encore d'évaluation
- Cype Architecture 02Document42 pagesCype Architecture 02somaya ehPas encore d'évaluation
- Corrige Serie2 CM 2020 2021Document5 pagesCorrige Serie2 CM 2020 2021somaya ehPas encore d'évaluation
- 3 BP PertesBPDocument47 pages3 BP PertesBPsomaya ehPas encore d'évaluation
- Serie3 CM 2020 2021Document3 pagesSerie3 CM 2020 2021somaya ehPas encore d'évaluation
- Projet CMDocument4 pagesProjet CMsomaya ehPas encore d'évaluation
- 2 BP MatériauxDocument46 pages2 BP Matériauxoussama elkesriPas encore d'évaluation
- Serie2 CM 2020 2021Document2 pagesSerie2 CM 2020 2021somaya ehPas encore d'évaluation
- Serie4 CM 2020 2021Document4 pagesSerie4 CM 2020 2021somaya ehPas encore d'évaluation
- Pfe BB 2Document54 pagesPfe BB 2somaya ehPas encore d'évaluation
- Norme Françai SE NF P 06-001Document2 pagesNorme Françai SE NF P 06-001somaya ehPas encore d'évaluation
- Corrige Serie4 CM 2020 2021Document9 pagesCorrige Serie4 CM 2020 2021somaya ehPas encore d'évaluation
- Pfe ModifieDocument156 pagesPfe Modifiesomaya ehPas encore d'évaluation
- CM Cours5 2020 2021Document89 pagesCM Cours5 2020 2021somaya ehPas encore d'évaluation
- Corrige Serie3 CM 2020 2021Document7 pagesCorrige Serie3 CM 2020 2021somaya ehPas encore d'évaluation
- PFE Fartas Bendrimia CorectDocument118 pagesPFE Fartas Bendrimia Corectsomaya ehPas encore d'évaluation
- Serie1 CM 2019 2020 PDFDocument2 pagesSerie1 CM 2019 2020 PDFChoaib Benyessef AhijiPas encore d'évaluation
- Norme Françai SE NF P 06-001Document2 pagesNorme Françai SE NF P 06-001somaya ehPas encore d'évaluation
- TP Piste LpegcDocument32 pagesTP Piste Lpegcsomaya ehPas encore d'évaluation
- CM Cours4 2020 2021Document72 pagesCM Cours4 2020 2021somaya ehPas encore d'évaluation
- Corrige Serie1 CM 2019 2020Document3 pagesCorrige Serie1 CM 2019 2020sgdfsgPas encore d'évaluation
- CM Cours3 2020 2021Document75 pagesCM Cours3 2020 2021somaya ehPas encore d'évaluation
- Etude Dalot Avec RobotDocument36 pagesEtude Dalot Avec RobotMehdimon Koko100% (4)
- Rapport Pfe Larhzal YounesDocument123 pagesRapport Pfe Larhzal Younessomaya ehPas encore d'évaluation
- Chapitre 3Document78 pagesChapitre 3salaheddinesabir76Pas encore d'évaluation
- Vacon NXS NXP User Manual DPD01224F FR PDFDocument175 pagesVacon NXS NXP User Manual DPD01224F FR PDFAmine HichriPas encore d'évaluation
- Rattrapage - Rattrapage Capteurs Et Chaines de Mesured-Juin-2022Document2 pagesRattrapage - Rattrapage Capteurs Et Chaines de Mesured-Juin-2022SAADIPas encore d'évaluation
- FIC Che M16: Problèm Mes de Te Mps Et de e Vitesse Débit: V Si La DisDocument11 pagesFIC Che M16: Problèm Mes de Te Mps Et de e Vitesse Débit: V Si La DisOlivier GOURDINPas encore d'évaluation
- Bac ResumeDocument1 pageBac Resumeomar50% (2)
- Td5nucl2020 RadioactivitéDocument2 pagesTd5nucl2020 RadioactivitéWissem JlassiPas encore d'évaluation
- Geometrie Masse Tenseur InertieDocument13 pagesGeometrie Masse Tenseur Inertiefz bfsPas encore d'évaluation
- Note de Calcul Vitrage R03Document4 pagesNote de Calcul Vitrage R03Oussama EzzitouniPas encore d'évaluation
- Énergie NoireDocument26 pagesÉnergie NoireAod DialloPas encore d'évaluation
- La Droite Dans Le Plan Exercices Non Corriges 8Document1 pageLa Droite Dans Le Plan Exercices Non Corriges 8saidbrownPas encore d'évaluation
- Homothies ch.13Document5 pagesHomothies ch.13Abdelkader ZakariyaPas encore d'évaluation
- 03 Cin 04 ChainesFermees Applications 01 CorrDocument7 pages03 Cin 04 ChainesFermees Applications 01 CorrMouhcine Ben MoussaPas encore d'évaluation
- Calcul Des Réactions D'un Système Isostatique: 5.1. Conventions de SignesDocument7 pagesCalcul Des Réactions D'un Système Isostatique: 5.1. Conventions de SignesAuréliePas encore d'évaluation
- Dérivée N-Ieme de (X - 1) N, Exercice de Analyse - 407309Document4 pagesDérivée N-Ieme de (X - 1) N, Exercice de Analyse - 407309agbotofiogodsonPas encore d'évaluation
- Ex LaserDocument2 pagesEx LaserTarek ZeblahPas encore d'évaluation
- 20 Integ T2Document7 pages20 Integ T2Harry Posteur2Pas encore d'évaluation
- SUJETS N°1 POUR LE RDV en SecondeDocument3 pagesSUJETS N°1 POUR LE RDV en Secondejeanmarietapsoba70Pas encore d'évaluation
- FCBTP Guide Complet Pour Le WebDocument126 pagesFCBTP Guide Complet Pour Le WebEliézerd UpenjmunguPas encore d'évaluation
- Universite Mohamed Boudiaf - M'silaDocument62 pagesUniversite Mohamed Boudiaf - M'silaimad ArsPas encore d'évaluation
- Rapport Zack AntonDocument28 pagesRapport Zack AntonImran Khan NiaziPas encore d'évaluation
- Electricité Cours I1Document38 pagesElectricité Cours I1TrhaxPas encore d'évaluation
- Examen 2020-2021 D'identification Et ModélisationDocument3 pagesExamen 2020-2021 D'identification Et Modélisationarwa bouazaouiPas encore d'évaluation
- 1 BEGC Systèmes de Terrassement Et de Géotechnique PDFDocument79 pages1 BEGC Systèmes de Terrassement Et de Géotechnique PDFddPas encore d'évaluation
- Les Types Des TurbinesDocument18 pagesLes Types Des TurbinesIssam Ennabih100% (2)
- Étude D'un Bâtiment (R+5) À Usage D'habitation MixteDocument184 pagesÉtude D'un Bâtiment (R+5) À Usage D'habitation MixteSamir MerzoukPas encore d'évaluation
- Aveline V., Démonstration CP, CT Et Limite de BetzDocument3 pagesAveline V., Démonstration CP, CT Et Limite de BetzMax pnlPas encore d'évaluation
- Continuite MPSIDocument8 pagesContinuite MPSIponPas encore d'évaluation
- BilamDocument14 pagesBilamKhene Mohamed LaminePas encore d'évaluation
- 2021 Fui-Ff S1 Sujet Ecrit de PhysiqueDocument9 pages2021 Fui-Ff S1 Sujet Ecrit de PhysiqueTricePas encore d'évaluation
- My Planche 2023-4Document4 pagesMy Planche 2023-4Yangane DioufPas encore d'évaluation