Vous aimerez peut-être aussi
- Moteur De Détonation Par Impulsion: Comment allons-nous voyager de Londres à New York en 45 minutes au lieu de 8 heures ?D'EverandMoteur De Détonation Par Impulsion: Comment allons-nous voyager de Londres à New York en 45 minutes au lieu de 8 heures ?Pas encore d'évaluation
- Recherche Machines ElectriquesDocument20 pagesRecherche Machines Electriquesrocceli nzoulouPas encore d'évaluation
- Travail de Bachelor - Atanur Demir PDFDocument82 pagesTravail de Bachelor - Atanur Demir PDFAnonymous Gb3EXZPas encore d'évaluation
- ElectromagnetismeDocument12 pagesElectromagnetismeCherif FallPas encore d'évaluation
- Ebook - La Voiture Électrique Pour Les NulsDocument28 pagesEbook - La Voiture Électrique Pour Les NulsNancy ThaisPas encore d'évaluation
- Généralités Machines ÉlectriquesDocument25 pagesGénéralités Machines ÉlectriquesAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Exercices N°1 + Corrigé de La Physique - NucléaireDocument2 pagesExercices N°1 + Corrigé de La Physique - NucléaireWafae LahjoujiPas encore d'évaluation
- Convertisseur 12v CC Vers 220VAC 160 WDocument11 pagesConvertisseur 12v CC Vers 220VAC 160 WguiguessPas encore d'évaluation
- Electromagnetisme Et Transmission OndeDocument429 pagesElectromagnetisme Et Transmission OndeyunafanelPas encore d'évaluation
- POO &creation de Bibliothèque ArduinoDocument14 pagesPOO &creation de Bibliothèque ArduinoAdolphe Pascal KIKI100% (1)
- Common-Core - Electronique Vol.1 (Valkenburgh-Nooger-Neville 1964 118p)Document65 pagesCommon-Core - Electronique Vol.1 (Valkenburgh-Nooger-Neville 1964 118p)Younes SakhirPas encore d'évaluation
- EManitDocument91 pagesEManitEl ardaoui SalmaPas encore d'évaluation
- Cours Mecatronique 2Document27 pagesCours Mecatronique 2El Mouatez FakerPas encore d'évaluation
- Théorie de Mécanisme 6Document7 pagesThéorie de Mécanisme 6hamza100% (2)
- Programmation Parallele Python PDFDocument9 pagesProgrammation Parallele Python PDFKhlifi AyoubPas encore d'évaluation
- Cours HacheursDocument90 pagesCours HacheursBouchakour SalimPas encore d'évaluation
- Simulation Temps-Réel Des Dispositifs D'electronique de Puissance Dédiés AuxDocument235 pagesSimulation Temps-Réel Des Dispositifs D'electronique de Puissance Dédiés AuxHerimalala HeriPas encore d'évaluation
- Feuille D'exercices Sur Le Chapitre 2Document3 pagesFeuille D'exercices Sur Le Chapitre 2Ilyes OunnediPas encore d'évaluation
- Penser en Java (Version 2.4) PDFDocument459 pagesPenser en Java (Version 2.4) PDFkakado100% (1)
- Configuration IpDocument154 pagesConfiguration IpHicham BoutouchePas encore d'évaluation
- Aut Log Vol1 v4Document175 pagesAut Log Vol1 v4Sylbe MarthePas encore d'évaluation
- Radiocommande Avec 2,4 GHZDocument145 pagesRadiocommande Avec 2,4 GHZPierro TechPas encore d'évaluation
- Etude Du Mouvement de Precession Du Plan de L Orbite Des Satellites ArtificielsDocument57 pagesEtude Du Mouvement de Precession Du Plan de L Orbite Des Satellites ArtificielsLeila BachiriPas encore d'évaluation
- Théorie de Mécanisme 3Document7 pagesThéorie de Mécanisme 3hamzaPas encore d'évaluation
- rakotondrasoaDavidT ESPA LC 12Document84 pagesrakotondrasoaDavidT ESPA LC 12IdrissBarinePas encore d'évaluation
- Trans de MVT Cours 2Document17 pagesTrans de MVT Cours 2Anonymous LZQTDsB95APas encore d'évaluation
- Support AKPP Extraits byDocument63 pagesSupport AKPP Extraits byKubixPas encore d'évaluation
- RPEDPDocument131 pagesRPEDPJawad MaalPas encore d'évaluation
- Extrait 42398210Document137 pagesExtrait 42398210Abderrahim BahaniPas encore d'évaluation
- Enpu MemoireDocument139 pagesEnpu Memoireousmanou oumarouPas encore d'évaluation
- 20 Cours - Correction Des SLCIDocument15 pages20 Cours - Correction Des SLCISilouane HubertPas encore d'évaluation
- 730 Organisation Pedagogie TPDocument43 pages730 Organisation Pedagogie TPJay Jay MbayomPas encore d'évaluation
- An3 - Equations Differentielles - Doc Fa - Rev 2014Document57 pagesAn3 - Equations Differentielles - Doc Fa - Rev 2014api-203629011Pas encore d'évaluation
- Formalisme de LagrangeDocument20 pagesFormalisme de LagrangeKamel AbboudiPas encore d'évaluation
- Vehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFDocument217 pagesVehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFB. BENCHAAPas encore d'évaluation
- Catalogue Binder Electro-AimantsDocument26 pagesCatalogue Binder Electro-AimantsClaudine ElisseevPas encore d'évaluation
- Theme Etude Et Realisation Dun PrototypeDocument54 pagesTheme Etude Et Realisation Dun PrototypeMohamed AbdelliPas encore d'évaluation
- TP 2 CommandeDocument10 pagesTP 2 CommandeChicharito Oussama100% (1)
- Eléments de Dimensionnement Des Alimentations À DécoupageDocument88 pagesEléments de Dimensionnement Des Alimentations À Découpagesaid3232Pas encore d'évaluation
- Initialisation Matlab PDFDocument55 pagesInitialisation Matlab PDFAbdelali BenmiloudPas encore d'évaluation
- Regdevoir CL2 GM2015 S2Document3 pagesRegdevoir CL2 GM2015 S2alae sahraoui100% (1)
- Pondeuse de BriqueDocument5 pagesPondeuse de BriqueLandry SoundoPas encore d'évaluation
- ZZZ Suppexos Ec5-Me5 Sinus ForceDocument12 pagesZZZ Suppexos Ec5-Me5 Sinus ForceYa Hia100% (1)
- ElectromagnetismeDocument109 pagesElectromagnetismeYoucef Medjaouri100% (1)
- Concours AVENIR Mathematiques 2010Document13 pagesConcours AVENIR Mathematiques 2010Chaimaa RmhePas encore d'évaluation
- Role de La MétrologieDocument9 pagesRole de La MétrologieMarwen SaidaniPas encore d'évaluation
- Projet Python 225Document12 pagesProjet Python 225edgar gbatoPas encore d'évaluation
- La Programmation en C ModerneDocument371 pagesLa Programmation en C ModerneBoubker BellahnaPas encore d'évaluation
- Avion À Propulsion Ionique: Aucune pièce mobile dans le système de propulsionD'EverandAvion À Propulsion Ionique: Aucune pièce mobile dans le système de propulsionPas encore d'évaluation
- Lévitation Magnétique: La physique complète du train le plus rapide jamais construitD'EverandLévitation Magnétique: La physique complète du train le plus rapide jamais construitPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Aile Conforme Adaptative: Plus de volets, la forme de l'aile de l'avion se transforme maintenantD'EverandAile Conforme Adaptative: Plus de volets, la forme de l'aile de l'avion se transforme maintenantPas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Twistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesD'EverandTwistronics: Le saint graal de la physique, des matériaux quantiques et des nanotechnologiesPas encore d'évaluation
- Memristor: Une nouvelle ère d'applications au-delà de la loi de Moore pour l'informatiqueD'EverandMemristor: Une nouvelle ère d'applications au-delà de la loi de Moore pour l'informatiquePas encore d'évaluation
- Moteur Vortex: Créer une tornade de feu dans les turbines pour plus d'énergieD'EverandMoteur Vortex: Créer une tornade de feu dans les turbines pour plus d'énergiePas encore d'évaluation
- Généralités Sur Les Systèmes AsservisDocument19 pagesGénéralités Sur Les Systèmes AsservisFaten BayouPas encore d'évaluation
- Chapitre 4 ActionneursDocument16 pagesChapitre 4 ActionneursFaten BayouPas encore d'évaluation
- Chapitre 2 ActionneursDocument21 pagesChapitre 2 ActionneursFaten BayouPas encore d'évaluation
- Chapitre 1 ActionneursDocument14 pagesChapitre 1 ActionneursFaten BayouPas encore d'évaluation
- Introduction Cours PhysStat1Document9 pagesIntroduction Cours PhysStat1fayza mezrhabPas encore d'évaluation
- Energie HydrauliqueDocument3 pagesEnergie HydrauliqueMineur NdieulaPas encore d'évaluation
- Inerie Fleche Poutre Acier AluDocument5 pagesInerie Fleche Poutre Acier AluNgouoPas encore d'évaluation
- HF020Document4 pagesHF020saif2020Pas encore d'évaluation
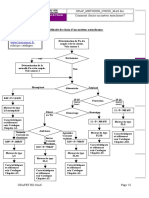
- Méthode de Choix D'un Moteur AsynchroneDocument3 pagesMéthode de Choix D'un Moteur AsynchroneSékhou DiakitéPas encore d'évaluation
- Physique Seconde C by Jean Cessac Georges TréherneDocument292 pagesPhysique Seconde C by Jean Cessac Georges TréherneEndjy Laguerre100% (2)
- Mesure Hydraulique PotentiometreDocument47 pagesMesure Hydraulique Potentiometreghiz-Pas encore d'évaluation
- MQdec 2022Document3 pagesMQdec 2022Hicham Al FalouPas encore d'évaluation
- Concours Doctorat UFAS 1 2019 4Document13 pagesConcours Doctorat UFAS 1 2019 4MohamedKecibaPas encore d'évaluation
- 5 Statique Plane Am1Document17 pages5 Statique Plane Am1YonnePas encore d'évaluation
- Instal BT ProfDocument31 pagesInstal BT ProfImmamHadramyPas encore d'évaluation
- THMOPQ - 04 Travail de Compression Adiabatique Reversible PDFDocument2 pagesTHMOPQ - 04 Travail de Compression Adiabatique Reversible PDFBertin KamsipaPas encore d'évaluation
- Phys 1ere C Minisession Av2022Document4 pagesPhys 1ere C Minisession Av2022Ngouen AnouarPas encore d'évaluation
- Leçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Document144 pagesLeçon 1: Atome D'hydrogène Spining Et Précession Résonance Excitation Et Relaxation Génération Du Signal (FID)Mohamed SeyidPas encore d'évaluation
- Averaged Unaveraged ResultsDocument24 pagesAveraged Unaveraged ResultsKévin GuiotPas encore d'évaluation
- Methode HAZEN WILLIAMS 1Document6 pagesMethode HAZEN WILLIAMS 1Salem Amarouchi100% (1)
- ÉlectrostatiqueDocument7 pagesÉlectrostatiqueBenchettah OumaimaPas encore d'évaluation
- Chapitre 1 - Introduction A La Theorie Des CordesDocument16 pagesChapitre 1 - Introduction A La Theorie Des Cordesivan kikungaPas encore d'évaluation
- Filtre Actif PassifDocument8 pagesFiltre Actif PassifZiko Jay AndaloussiPas encore d'évaluation
- Bételgeuse - Salsa JDocument10 pagesBételgeuse - Salsa JFabien LegeronPas encore d'évaluation
- Partie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationDocument2 pagesPartie Evaluations Des Ressources 15Pts Exercice 1 Pts Considère Dans L'équationyvesyacinthendjoh1234Pas encore d'évaluation
- Chapitre 2Document12 pagesChapitre 2anasPas encore d'évaluation
- Analyse VibratoireDocument21 pagesAnalyse VibratoireOmarPas encore d'évaluation
- Chapitre1 2Document36 pagesChapitre1 2Mohammed HachemiPas encore d'évaluation
- Aspects ÉnergéDocument3 pagesAspects ÉnergéHaraf HarafPas encore d'évaluation
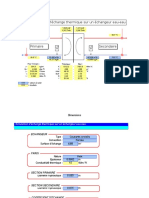
- Simulation Echangeurs Pour KarimDocument8 pagesSimulation Echangeurs Pour KarimYassine BouaichiPas encore d'évaluation
- Les Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)Document111 pagesLes Premiers Travaux de Jean-Pierre Vigier Sur La Théorie Des Quanta: Une Rencontre Entre Science Et Marxisme (1951-1954)virgile_bessonPas encore d'évaluation
- Series Ondes LumineusesDocument4 pagesSeries Ondes LumineusesMoulayMoulyPas encore d'évaluation
- Turbine À VapeurDocument59 pagesTurbine À VapeurHadjer Zitoune100% (1)
- Poussée D'archimède - WikipédiaDocument51 pagesPoussée D'archimède - WikipédiaFidele N'gnaorePas encore d'évaluation