Vous aimerez peut-être aussi
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Variateur de VitesseDocument10 pagesVariateur de VitesseKossayEssidPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Circuit de Charge BatterieDocument18 pagesCircuit de Charge Batteriebenmoh2000Pas encore d'évaluation
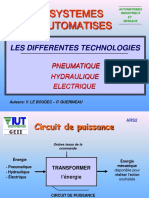
- 5 Differentes Technologies Pro PDFDocument44 pages5 Differentes Technologies Pro PDFbaptichosendyPas encore d'évaluation
- Les Moteurs Asynchrones TriphasesDocument9 pagesLes Moteurs Asynchrones TriphasesHassen BrahimPas encore d'évaluation
- Chapitre.3.actionneursDocument11 pagesChapitre.3.actionneursFaten Bayou0% (1)
- Les Moteurs - Démontage Et Remontage D'un Moteur - Remontage FlasquesDocument3 pagesLes Moteurs - Démontage Et Remontage D'un Moteur - Remontage Flasquesanon_119870113Pas encore d'évaluation
- Modification Alternateur ValeoDocument5 pagesModification Alternateur ValeoJorge AmaralPas encore d'évaluation
- Fonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFDocument8 pagesFonction Convertir Moteurs Asynchrones 2 Bac Science Dingenieur PDFAmscool SavadogoPas encore d'évaluation
- Rapport de Stage Rebobinage Des Moteurs ElectriquesDocument45 pagesRapport de Stage Rebobinage Des Moteurs Electriquesamine baatitePas encore d'évaluation
- MODELE MEMOIRE FIN DE CYCLE MASTER - CopieDocument97 pagesMODELE MEMOIRE FIN DE CYCLE MASTER - CopierthryjPas encore d'évaluation
- Générateur Synchrone Standard KATO - FRDocument49 pagesGénérateur Synchrone Standard KATO - FRamekhzoumiPas encore d'évaluation
- Electricite Basique 2Document7 pagesElectricite Basique 2Emmanuel AmaviPas encore d'évaluation
- Modelisation Et Commande Des MachinesDocument300 pagesModelisation Et Commande Des MachinesNew VuesPas encore d'évaluation
- Moteurs SpéciauxDocument7 pagesMoteurs SpéciauxMoulayMoulyPas encore d'évaluation
- Karim TRAORE MEMOIRE 1Document82 pagesKarim TRAORE MEMOIRE 1Leroy SanéPas encore d'évaluation
- Chapitre 3 Generalites Sur Les Machines ElectriquesDocument31 pagesChapitre 3 Generalites Sur Les Machines ElectriquesanisPas encore d'évaluation
- 1 Excitation Des Machines SynchronesDocument3 pages1 Excitation Des Machines SynchronesHoussine AdamPas encore d'évaluation
- Moteurs LsDocument56 pagesMoteurs LsYEKINI Abdul MadjidPas encore d'évaluation
- Le Démarrage Étoile TriangleDocument2 pagesLe Démarrage Étoile TriangledonsallusPas encore d'évaluation
- RomaDocument33 pagesRomaJesuis ContentPas encore d'évaluation
- Eléments de Dimensionnement Des Alimentations À DécoupageDocument88 pagesEléments de Dimensionnement Des Alimentations À Découpagesaid3232Pas encore d'évaluation
- Machine Courant Continu Et AlternatifDocument18 pagesMachine Courant Continu Et AlternatifngouoPas encore d'évaluation
- Asg 3 Moteurs Et ChargesDocument28 pagesAsg 3 Moteurs Et ChargesOussama SaeighPas encore d'évaluation
- Les Bases de L'électricité 9 Les Applications de L'électromagnétismeDocument40 pagesLes Bases de L'électricité 9 Les Applications de L'électromagnétismeRéunion Ram100% (1)
- TFE Maillot 2012Document84 pagesTFE Maillot 2012didoumaxPas encore d'évaluation
- Arborescence Fonctionnelle Du Groupe Electrogene Elemax Sh7000dx 1Document6 pagesArborescence Fonctionnelle Du Groupe Electrogene Elemax Sh7000dx 1TOPASOPas encore d'évaluation
- Moteur Asychrone TriphaséDocument111 pagesMoteur Asychrone Triphaséchance boundaPas encore d'évaluation
- La Protection Des Moteur en BTDocument19 pagesLa Protection Des Moteur en BTRobin SonaPas encore d'évaluation
- Moteur ATRDocument15 pagesMoteur ATRMouh ZourdaniPas encore d'évaluation
- I Introduction À La ProtectionDocument59 pagesI Introduction À La ProtectionAmiiRa100% (1)
- Vehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFDocument217 pagesVehicule Electrique Etude Et Modélisation D'une Machine Synchrone À Aimant Permanent PDFB. BENCHAAPas encore d'évaluation
- Machine Asynchrone Du Schema Equivalent FinaleDocument11 pagesMachine Asynchrone Du Schema Equivalent FinaleOtman StariPas encore d'évaluation
- Convertisseur 12v CC Vers 220VAC 160 WDocument11 pagesConvertisseur 12v CC Vers 220VAC 160 WguiguessPas encore d'évaluation
- Moteurs Electriques 01Document129 pagesMoteurs Electriques 01Slim SaloumPas encore d'évaluation
- VARIATEUR - DE - VITESSE - Doc ProfDocument3 pagesVARIATEUR - DE - VITESSE - Doc Profsaid100% (2)
- Rapport de Mémoire Master Energie ZONGO JUDICAEL Version FinaleDocument81 pagesRapport de Mémoire Master Energie ZONGO JUDICAEL Version FinaleLiban AimoulPas encore d'évaluation
- Modelisation - Machine Synchrone1Document39 pagesModelisation - Machine Synchrone1JihadJiji0% (1)
- Installations Industrielles Et Variateurs de VitesseDocument14 pagesInstallations Industrielles Et Variateurs de VitesseIssam IssamPas encore d'évaluation
- 5e Elec Chap2 Cours PDFDocument4 pages5e Elec Chap2 Cours PDFYoucef DiafPas encore d'évaluation
- Depannage Electronique PDFDocument32 pagesDepannage Electronique PDFJules SamaPas encore d'évaluation
- EMI Marocetude - Com M11 Principes de Moteurs Et de Generatrices A c.a.ge-eEI 2Document67 pagesEMI Marocetude - Com M11 Principes de Moteurs Et de Generatrices A c.a.ge-eEI 2fayssal2267% (3)
- Turbo Alternate UrsDocument16 pagesTurbo Alternate UrsLyesPas encore d'évaluation
- Chap 4 Cours 1 Demarrage Et Freinage de MASDocument17 pagesChap 4 Cours 1 Demarrage Et Freinage de MASمفتاح الدينPas encore d'évaluation
- Les Grands Principes de L'electricite AutomobileDocument8 pagesLes Grands Principes de L'electricite AutomobileMohamed HamouchiPas encore d'évaluation
- TP 5 Etude Reducteur PendulaireDocument11 pagesTP 5 Etude Reducteur PendulaireKamel Bousnina0% (1)
- HDR Ouari KamelDocument48 pagesHDR Ouari KameljyPas encore d'évaluation
- Catalago Cuadros Control FRDocument20 pagesCatalago Cuadros Control FRhydreau100% (1)
- Freinage DynamiqueDocument12 pagesFreinage Dynamiqueramzi2521Pas encore d'évaluation
- Cours HacheursDocument90 pagesCours HacheursBouchakour SalimPas encore d'évaluation
- Permutation Automatique Des SourcesDocument16 pagesPermutation Automatique Des SourcesYounes El AlamiPas encore d'évaluation
- Electrotechnique Chap7Document23 pagesElectrotechnique Chap7abdelfattah hamidouchePas encore d'évaluation
- Chapitre 4.modélisation Et Simulation Des Machines SynchronesDocument35 pagesChapitre 4.modélisation Et Simulation Des Machines Synchronesبكر بكرPas encore d'évaluation
- Récupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriqueD'EverandRécupération D'Énergie: Transformer l'énergie ambiante présente dans l'environnement en énergie électriquePas encore d'évaluation
- L'électricité - Découvreurs et Inventeurs: Tome V - Vecteur d'informationD'EverandL'électricité - Découvreurs et Inventeurs: Tome V - Vecteur d'informationPas encore d'évaluation
- Électronique Flexible: Votre corps va interagir avec l'électronique flexibleD'EverandÉlectronique Flexible: Votre corps va interagir avec l'électronique flexiblePas encore d'évaluation
- Motorisation AsynchroneDocument6 pagesMotorisation AsynchroneAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Machines À Courant ContinuDocument25 pagesMachines À Courant ContinuAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Projection A2 - TransfoDocument14 pagesProjection A2 - TransfoAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Cours MAS A2 2021Document8 pagesCours MAS A2 2021Abdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Epreuve E41 Bts Elec 2019 Elements de CorrectionDocument5 pagesEpreuve E41 Bts Elec 2019 Elements de CorrectionAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Plan Du Cours Analyse Des Couts Et Gestion FinanciereDocument47 pagesPlan Du Cours Analyse Des Couts Et Gestion FinanciereAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Theme: Ergonomie Et HseDocument25 pagesTheme: Ergonomie Et HseAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Devoir de Methode Et Industrialisation: Enseignant: MR Georges ONANADocument4 pagesDevoir de Methode Et Industrialisation: Enseignant: MR Georges ONANAAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- Devoirs Methode Et IndustrialisationDocument3 pagesDevoirs Methode Et IndustrialisationAbdel-Mahamud CHIMOUN-ZANGUEPas encore d'évaluation
- IST Commande Des Machines ELT3 140421 P2Document105 pagesIST Commande Des Machines ELT3 140421 P2Joël SebgoPas encore d'évaluation
- TD3-Circuits MagnétiquesDocument4 pagesTD3-Circuits MagnétiquesGhizlane FaroukiPas encore d'évaluation
- Série Interaction MagnétiqueDocument5 pagesSérie Interaction Magnétiqueamine touatiPas encore d'évaluation
- ElectrotechniqueDocument77 pagesElectrotechniqueclaude feunePas encore d'évaluation
- Livre Induction PDFDocument37 pagesLivre Induction PDFAnisse HimeurPas encore d'évaluation
- Belkacem Berrehail Identification Des Parametres D'un Moteur Asynchrone A CageDocument84 pagesBelkacem Berrehail Identification Des Parametres D'un Moteur Asynchrone A CageboucharebPas encore d'évaluation
- Compilation NS4Document5 pagesCompilation NS4PIERRE Wilcoste100% (3)
- Cours EDP Master Energie ElectriqueDocument61 pagesCours EDP Master Energie ElectriqueMehdiTouki100% (1)
- Izerkheflyazid Mounsisabiha MenanakahinaDocument73 pagesIzerkheflyazid Mounsisabiha Menanakahinamouloud hatemPas encore d'évaluation
- AD Spectroscopie RMNDocument6 pagesAD Spectroscopie RMNClément AbivenPas encore d'évaluation
- Exercices DS MCCDocument22 pagesExercices DS MCCAnas Yassine50% (2)
- PHYS304 Chapitre4Document7 pagesPHYS304 Chapitre4Antonio SabaPas encore d'évaluation
- Tissot T TouchDocument14 pagesTissot T TouchlamphilpierrePas encore d'évaluation
- Cours ElecDocument279 pagesCours ElecDadi AzizPas encore d'évaluation
- Systemes D Allumage Moteur A CombustionDocument73 pagesSystemes D Allumage Moteur A CombustionAziz ArrahalPas encore d'évaluation
- PFE06 AntennePatchDocument111 pagesPFE06 AntennePatchAbdelkader Ali Cherif0% (1)
- Chap02 - Conversion Electromagnetique PDFDocument26 pagesChap02 - Conversion Electromagnetique PDFmelmoth42Pas encore d'évaluation
- BAC S2 1G SN 2022 Sujet - WahabdiopDocument4 pagesBAC S2 1G SN 2022 Sujet - WahabdiopAmadou Oury DialloPas encore d'évaluation
- Chap 2 1Document124 pagesChap 2 1didy7891Pas encore d'évaluation
- NYB - XXI - Chap 5.2Document8 pagesNYB - XXI - Chap 5.2Dieu merci LumeryPas encore d'évaluation
- Cours Capteurs1Document55 pagesCours Capteurs1Chaouki GuesmiPas encore d'évaluation
- Defauts Dans Les Transformateurs Et Diagnostic - 1Document9 pagesDefauts Dans Les Transformateurs Et Diagnostic - 1Landry KiendrebeogoPas encore d'évaluation
- مواضيع البكالوريا ل موريطانيا من 2002إلى 2012 PDFDocument177 pagesمواضيع البكالوريا ل موريطانيا من 2002إلى 2012 PDFالغزيزال الحسن EL GHZIZAL HassanePas encore d'évaluation
- Cours Du Champ Magnétique - Dr. Karam OuharouDocument5 pagesCours Du Champ Magnétique - Dr. Karam Ouharouأكاديمية التأكدم - Taakdom AcademyPas encore d'évaluation
- Hamiti 2009Document162 pagesHamiti 2009Moha BoussPas encore d'évaluation
- TD 25 (Chap. 24) - Description D'un Champ Magn Etique: I Questions de CoursDocument5 pagesTD 25 (Chap. 24) - Description D'un Champ Magn Etique: I Questions de CoursClervois MathiadoPas encore d'évaluation
- Leçon N°5: Approximation Gyroscopique. Effets Dans Les Domaines Macroscopique Et Microscopique. (1 CU)Document10 pagesLeçon N°5: Approximation Gyroscopique. Effets Dans Les Domaines Macroscopique Et Microscopique. (1 CU)Houda ElotebyPas encore d'évaluation
- 1 Ere Sactivitephyschampmagnaimant 7 MNDocument15 pages1 Ere Sactivitephyschampmagnaimant 7 MNDadati SouPas encore d'évaluation
- MP15 Production Et Mesure de Champ Magn TiqueDocument5 pagesMP15 Production Et Mesure de Champ Magn TiquetekougoumePas encore d'évaluation
- Mini ProjetDocument13 pagesMini ProjetHoussine Gue100% (3)