Vous aimerez peut-être aussi
- Sujet Corrige Ratt CC Analyse2Document4 pagesSujet Corrige Ratt CC Analyse2Ikram BourtachePas encore d'évaluation
- DS1 CorrDocument5 pagesDS1 CorrDABAKH LDEEBOYPas encore d'évaluation
- Correction Série 2Document10 pagesCorrection Série 2youssef.bensalimPas encore d'évaluation
- Capes Externe Math 2007 CorrectionDocument10 pagesCapes Externe Math 2007 CorrectionAlae sayPas encore d'évaluation
- Correction T1 06Document3 pagesCorrection T1 06MasclePas encore d'évaluation
- Corrige TD1 S1 LF EG 2023 24Document4 pagesCorrige TD1 S1 LF EG 2023 24Haitam BLmPas encore d'évaluation
- ds3 Tcs 002 CorDocument6 pagesds3 Tcs 002 CorZakaria EzziyadiPas encore d'évaluation
- Correction TD5 Analyse1 MIPC 21 22Document13 pagesCorrection TD5 Analyse1 MIPC 21 22Abdessamad AchehrourPas encore d'évaluation
- Série de Révision Avec Correction Math Fonction LN Bac Sciences Exp 2013 2014 MR Bouzouraa Chaouki 1Document5 pagesSérie de Révision Avec Correction Math Fonction LN Bac Sciences Exp 2013 2014 MR Bouzouraa Chaouki 1Riahi Chiraz100% (1)
- td1 CorrigeDocument7 pagestd1 Corrigemichele.roberts.eventsPas encore d'évaluation
- Examen de Remplacement Analyse 2 Avec Corrige 2020-2021Document4 pagesExamen de Remplacement Analyse 2 Avec Corrige 2020-2021zebivitePas encore d'évaluation
- 04 Développements Limités CorrigéDocument9 pages04 Développements Limités Corrigékukis14Pas encore d'évaluation
- Corrige 3Document3 pagesCorrige 3Oumarou Djibo ZoulkiffiPas encore d'évaluation
- Corrige Mathematique Ide 2013Document3 pagesCorrige Mathematique Ide 2013Dana TcheuhwePas encore d'évaluation
- Solution Des Exercices - Limites Et Continuité-Ts - SunudaaraDocument19 pagesSolution Des Exercices - Limites Et Continuité-Ts - SunudaaraJule BaPas encore d'évaluation
- Devoir 1 Enonce 1Document1 pageDevoir 1 Enonce 1springPas encore d'évaluation
- Exercice Fonction Numérique 11èsDocument8 pagesExercice Fonction Numérique 11èsFadimata SaïdiPas encore d'évaluation
- DM 10Document1 pageDM 10sr1195127Pas encore d'évaluation
- Td1-Math1Document4 pagesTd1-Math1jilanihamzajesmiPas encore d'évaluation
- 07c. Équations Du Second Degré - CorrigéDocument3 pages07c. Équations Du Second Degré - Corrigémichmuch21Pas encore d'évaluation
- D Eveloppements Limit EsDocument1 pageD Eveloppements Limit EsMoustapha CheikhPas encore d'évaluation
- All Lim ContinuiteDocument4 pagesAll Lim ContinuitetorkitaherPas encore d'évaluation
- Exos LimitescorDocument10 pagesExos LimitescorflorenciatcherePas encore d'évaluation
- Smpanalyse S3Document4 pagesSmpanalyse S3M YacinePas encore d'évaluation
- Analys Num Exer Corige 1Document8 pagesAnalys Num Exer Corige 1Anonymous ehE1UOTwooPas encore d'évaluation
- 1S1 Devoir1 Sem2 LDTHD 23-24 DDocument1 page1S1 Devoir1 Sem2 LDTHD 23-24 Diamacteur34Pas encore d'évaluation
- LogarithmeDocument12 pagesLogarithmeOthnielPas encore d'évaluation
- 1C 1D2T 23 24 CorrectionDocument16 pages1C 1D2T 23 24 CorrectionCherif AdeossiPas encore d'évaluation
- 00 Ctrle 25 09 2017 CorrectionDocument4 pages00 Ctrle 25 09 2017 Correctionbonel dafonsecaPas encore d'évaluation
- Examen Analyse 2 Avec Corrige 2020-2021Document5 pagesExamen Analyse 2 Avec Corrige 2020-2021zebivitePas encore d'évaluation
- Exercices - Comparaison Des FonctionsDocument1 pageExercices - Comparaison Des FonctionsAyoub AkoucharPas encore d'évaluation
- TD Analyse 1 L1S1 GC FAGESDocument4 pagesTD Analyse 1 L1S1 GC FAGESOumar CisséPas encore d'évaluation
- MC LaurinDocument1 pageMC LaurinSamuele FortiniPas encore d'évaluation
- Exercices2019 2Document2 pagesExercices2019 2imane.elmalkiPas encore d'évaluation
- Annales 2013-2014Document18 pagesAnnales 2013-2014IbnAttarPas encore d'évaluation
- Serie Dexercices Limite Et Continuite 1e s1 SunudaaraDocument4 pagesSerie Dexercices Limite Et Continuite 1e s1 SunudaaraAida MbodjiPas encore d'évaluation
- Sujet de Rattrapage Math1 STDocument1 pageSujet de Rattrapage Math1 STsino spagoPas encore d'évaluation
- Devoir Maison 1Document1 pageDevoir Maison 1simo khPas encore d'évaluation
- Partiel Analyse2 2016corrigeDocument5 pagesPartiel Analyse2 2016corrigehichem benbouPas encore d'évaluation
- TD Corrigé Interpolation Et IntegrationDocument5 pagesTD Corrigé Interpolation Et IntegrationEl jaouhary Mohammed100% (2)
- Série N°1Document4 pagesSérie N°1Bou ChraPas encore d'évaluation
- CC3 2019 CorrigeDocument7 pagesCC3 2019 CorrigeMohammed AaliPas encore d'évaluation
- Er 3Document2 pagesEr 3ala gharbiPas encore d'évaluation
- Exos-Dl - Corrige - 768Document2 pagesExos-Dl - Corrige - 768Ricky RickPas encore d'évaluation
- Calcul Des LimitesDocument10 pagesCalcul Des LimitesLime1Pas encore d'évaluation
- CompositionDocument8 pagesCompositionLime1Pas encore d'évaluation
- Elements Correction TestDocument2 pagesElements Correction TestAbena Bala Marc-LoïcPas encore d'évaluation
- TD1 SNL 2019-2020Document6 pagesTD1 SNL 2019-2020Dan SnowPas encore d'évaluation
- CC1 2018 Correction Sujet1Document4 pagesCC1 2018 Correction Sujet1Missi pssaPas encore d'évaluation
- Corrige Devoir Surveillé N: 6Document8 pagesCorrige Devoir Surveillé N: 6Douae KhaldouniPas encore d'évaluation
- Analyse 2 Examen 01Document5 pagesAnalyse 2 Examen 01Junior JosephsonPas encore d'évaluation
- Correction Partie 5Document10 pagesCorrection Partie 5AbdelmalkPas encore d'évaluation
- TD-N-1-limites-conti Serie 1 2SM-1 - 230924 - 114121Document6 pagesTD-N-1-limites-conti Serie 1 2SM-1 - 230924 - 114121RcaPas encore d'évaluation
- Mag ln2 4ecoDocument2 pagesMag ln2 4ecoHamzaoui KhalilPas encore d'évaluation
- TD4 Dualite Corrige PDFDocument3 pagesTD4 Dualite Corrige PDFIbidhi SanaPas encore d'évaluation
- Chap 6 Bis Generalites Sur Les Fonctions Equations Et Inequations IieDocument2 pagesChap 6 Bis Generalites Sur Les Fonctions Equations Et Inequations IieLAYNA LAYNAPas encore d'évaluation
- Mc2exercicesetexamens08 PDFDocument48 pagesMc2exercicesetexamens08 PDFMohamed ArabPas encore d'évaluation
- - Tours de magie expliqués par des bienfaits du calcul littéralD'Everand- Tours de magie expliqués par des bienfaits du calcul littéralPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- TP N°4 TorsionDocument7 pagesTP N°4 TorsionKIYOMI FFPas encore d'évaluation
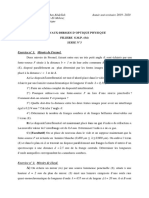
- Travaux-Diriges D'optique Physique Serie N°3Document24 pagesTravaux-Diriges D'optique Physique Serie N°3Jalal TiYal100% (1)
- TD2 Igmp1 2019-2020Document2 pagesTD2 Igmp1 2019-2020Chaimae Ben hadouPas encore d'évaluation
- Centrale Supelec PC 2014 Maths 2 EpreuveDocument4 pagesCentrale Supelec PC 2014 Maths 2 EpreuveOussama SouissiPas encore d'évaluation
- Cours Métrologie EST2020Document260 pagesCours Métrologie EST2020Amine MalihPas encore d'évaluation
- 2as-Projets-1 SequenceDocument24 pages2as-Projets-1 SequenceNacera Mohammadi100% (1)
- Cours 1 - Détermination de La Résultante Des ForcesDocument8 pagesCours 1 - Détermination de La Résultante Des ForcesOumar SissokoPas encore d'évaluation
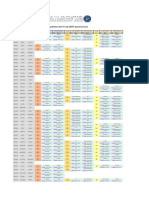
- Calendrier Prévisionel3 TP SMP3 CompressedDocument11 pagesCalendrier Prévisionel3 TP SMP3 CompressedTahar didouchPas encore d'évaluation
- TP2 CVS Ac DCDocument6 pagesTP2 CVS Ac DCKaneki KenPas encore d'évaluation
- S2 TLeAC 2024Document2 pagesS2 TLeAC 2024ahmadoulaminou068Pas encore d'évaluation
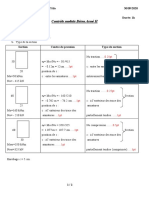
- Correction-Contrôle-Béton 2020 S2Document2 pagesCorrection-Contrôle-Béton 2020 S2Rochdi KaderPas encore d'évaluation
- Calcul SLTDocument11 pagesCalcul SLTMbgardPas encore d'évaluation
- TD07Document8 pagesTD07agbotofiogodsonPas encore d'évaluation
- Conceptions Des Eleves Et Resolution de ProblemesDocument12 pagesConceptions Des Eleves Et Resolution de ProblemesFatiha RahiouiPas encore d'évaluation
- Cours - Automatique Ensa TetouanDocument162 pagesCours - Automatique Ensa TetouanmohamedPas encore d'évaluation
- Soudage Conception D'un Assemblage SoudéDocument17 pagesSoudage Conception D'un Assemblage SoudéVivien Emeraldo100% (1)
- Support - Cours - Nutrition - Metabolisme-1 - CopieDocument50 pagesSupport - Cours - Nutrition - Metabolisme-1 - Copienaima aminaPas encore d'évaluation
- Note de Calcul Dalot MBIGOUDocument28 pagesNote de Calcul Dalot MBIGOUYannice Moufouma KombilaPas encore d'évaluation
- Bentonite MS2 09Document10 pagesBentonite MS2 09Khlif NadaPas encore d'évaluation
- Semaine 12 - C12 - Rela - 21Document22 pagesSemaine 12 - C12 - Rela - 21Felix AFEKUPas encore d'évaluation
- Cor - TD Edo 2020 5 Exos3 4Document2 pagesCor - TD Edo 2020 5 Exos3 4Ahmed AbbassiPas encore d'évaluation
- Exposé RDMDocument7 pagesExposé RDMabdullah boulifaPas encore d'évaluation
- Cour Composite Licence SDM PDFDocument82 pagesCour Composite Licence SDM PDFSm AhiPas encore d'évaluation
- Selon La Théorie Électromagnétique de La Lumière Développée Par JamesDocument2 pagesSelon La Théorie Électromagnétique de La Lumière Développée Par JameskakeraPas encore d'évaluation
- BSP-740 1 PhysiqueDocument96 pagesBSP-740 1 PhysiquelandsheerePas encore d'évaluation
- Cours Initiation Aux EC - ISTEUB-2020-2021Document33 pagesCours Initiation Aux EC - ISTEUB-2020-2021hassene elyassPas encore d'évaluation
- OS Mec 21-22 EX4Document3 pagesOS Mec 21-22 EX4youssef bassirPas encore d'évaluation
- Cours N°2 - GéophysiqueDocument69 pagesCours N°2 - GéophysiquearachidPas encore d'évaluation
- ASM 0025 Skytrack - BookDocument238 pagesASM 0025 Skytrack - BookFrancisco CruzPas encore d'évaluation
- 1 Résistance Des Matériaux Appliquée: Structures MétalliquesDocument23 pages1 Résistance Des Matériaux Appliquée: Structures MétalliquesMediterranei ExypniPas encore d'évaluation