Vous aimerez peut-être aussi
- Enedis GUI RES - 03EDocument72 pagesEnedis GUI RES - 03ESadiki OngaPas encore d'évaluation
- 01 CPTP Cahier Des Prescriptions Techniques ParticulieresDocument100 pages01 CPTP Cahier Des Prescriptions Techniques Particulieresигор игорPas encore d'évaluation
- V2 Proposition Technique Et Financière TAGDocument12 pagesV2 Proposition Technique Et Financière TAGMeissa BeyePas encore d'évaluation
- 2 CDC Piac VF 21032022 1Document13 pages2 CDC Piac VF 21032022 1abdel.omarPas encore d'évaluation
- Actix Analyzer Nemo Tool Réf 04-09-15Document13 pagesActix Analyzer Nemo Tool Réf 04-09-15edaxterPas encore d'évaluation
- R4P Pin DamienDocument4 pagesR4P Pin DamienAchchabPas encore d'évaluation
- Dta 12 - 13-1638 - V2Document19 pagesDta 12 - 13-1638 - V2Stefano PerelliPas encore d'évaluation
- Offre Technique Tetra FrancevilleDocument30 pagesOffre Technique Tetra FrancevilleFranklin Kassa DevumbyPas encore d'évaluation
- Nemo Tool Nemo Analyzer RF 05-10-28 V3Document9 pagesNemo Tool Nemo Analyzer RF 05-10-28 V3MiradoniainaRakotoarimananaPas encore d'évaluation
- CMB2-657 - A (Systeme de Supervision)Document39 pagesCMB2-657 - A (Systeme de Supervision)med100% (1)
- CCTP PGI AAN v32Document58 pagesCCTP PGI AAN v32Nick JoeyPas encore d'évaluation
- Systèmes Communicants Et Intelligents Systèmes Communicants Et IntelligentsDocument15 pagesSystèmes Communicants Et Intelligents Systèmes Communicants Et IntelligentsJordani MikePas encore d'évaluation
- Télé-Relevé Par Liaison Téléphonique RTC Et GSM Des Appareils de Comptage de Type PME-PMIDocument85 pagesTélé-Relevé Par Liaison Téléphonique RTC Et GSM Des Appareils de Comptage de Type PME-PMIsirovic90Pas encore d'évaluation
- Mcps 8156 Aaaaa 01Document106 pagesMcps 8156 Aaaaa 01mhamed bouhaikPas encore d'évaluation
- Electronique Pratique 329 Jui Aou 2008Document60 pagesElectronique Pratique 329 Jui Aou 2008AliproPas encore d'évaluation
- DTA Mauka Line N 5.1 15 2470 V1 Validit 31 Juillet 2027Document42 pagesDTA Mauka Line N 5.1 15 2470 V1 Validit 31 Juillet 2027samirdergicPas encore d'évaluation
- Mémoire - Technique GBDocument14 pagesMémoire - Technique GBKhalil MachkourPas encore d'évaluation
- Erdf Pro Res - 67eDocument34 pagesErdf Pro Res - 67eVGCCPas encore d'évaluation
- Cahier Des ChargesDocument12 pagesCahier Des Chargesstevyobame163Pas encore d'évaluation
- Hamza EddahmounyDocument1 pageHamza EddahmounyOth ManePas encore d'évaluation
- (Ghiotto 2014) Techniques Radiofréquences Et Conception de SystèmesDocument7 pages(Ghiotto 2014) Techniques Radiofréquences Et Conception de SystèmesJean-Hubert DelassalePas encore d'évaluation
- Système D'irrigation Intelligent: Rapport de Projet de Fin D'etudesDocument51 pagesSystème D'irrigation Intelligent: Rapport de Projet de Fin D'etudesMouad El FadiliPas encore d'évaluation
- Sce GOURDACHE SAMIR PDFDocument117 pagesSce GOURDACHE SAMIR PDFAmani ChkirPas encore d'évaluation
- Livre Blanc Sur Lamelioration Du Raccordement en Fibre OptiqueDocument23 pagesLivre Blanc Sur Lamelioration Du Raccordement en Fibre OptiqueMat100% (1)
- Suivi Dune Campagne Dirrigation Par Un Enrouleur Darrosage Via Un SmartphoneDocument10 pagesSuivi Dune Campagne Dirrigation Par Un Enrouleur Darrosage Via Un SmartphoneadrarwalidPas encore d'évaluation
- Architecture Réseau FR10183Document6 pagesArchitecture Réseau FR10183BAHMANI ALOUANIPas encore d'évaluation
- Design Guide FR v4.3 052022Document26 pagesDesign Guide FR v4.3 052022Emitech SARLPas encore d'évaluation
- Rapport Pfa VFDocument61 pagesRapport Pfa VFhaddadi meriemPas encore d'évaluation
- Standard Universel de La Propriété IntellectuelleDocument34 pagesStandard Universel de La Propriété Intellectuellealain_souloumiacPas encore d'évaluation
- Uimc 02 Act DRF 000429 1Document61 pagesUimc 02 Act DRF 000429 1Ahmed LabidiPas encore d'évaluation
- Avis Tech ActuDocument24 pagesAvis Tech ActuTarik DIOURIPas encore d'évaluation
- Giselec FRDocument2 pagesGiselec FRTaj NioukyPas encore d'évaluation
- EMAPHOS2-EA-SPX-0012-00.03 - Réseaux FODocument8 pagesEMAPHOS2-EA-SPX-0012-00.03 - Réseaux FOmarouanePas encore d'évaluation
- Giselec fr0Document2 pagesGiselec fr0bricePas encore d'évaluation
- Enedis NOI CPT - 54EDocument38 pagesEnedis NOI CPT - 54Efufu ManPas encore d'évaluation
- Dta 13 - 17-1377 - V3Document35 pagesDta 13 - 17-1377 - V3Pierre ALISSEPas encore d'évaluation
- CDC Verification Tenue Mecanique Charpente Ponts Artois Et Chaudronnerie SeeDocument3 pagesCDC Verification Tenue Mecanique Charpente Ponts Artois Et Chaudronnerie SeeBah Amadou BellaPas encore d'évaluation
- Changement Verin Ecolregul v2Document7 pagesChangement Verin Ecolregul v2fedelogement allierPas encore d'évaluation
- 08 Etude GeotechniqueDocument43 pages08 Etude GeotechniqueMascariPas encore d'évaluation
- 2021 EMEA General Brochure A4 FRDocument20 pages2021 EMEA General Brochure A4 FRdestinPas encore d'évaluation
- TP6.1 - Installation PVDocument9 pagesTP6.1 - Installation PVboussaid nejlaPas encore d'évaluation
- Dossier TechniqueDocument20 pagesDossier Techniquealexpereira1307Pas encore d'évaluation
- Utf-8' 'News - 93 - FRDocument8 pagesUtf-8' 'News - 93 - FRAminul Islam RidoyPas encore d'évaluation
- Notice Utilisation Digicode Noralsy Provic One X2Document23 pagesNotice Utilisation Digicode Noralsy Provic One X2paitierPas encore d'évaluation
- VA Ligne Réglage ArevaDocument98 pagesVA Ligne Réglage Arevalisley perezPas encore d'évaluation
- Data Sheet Rosemount Tank Gauging System FR 81076Document44 pagesData Sheet Rosemount Tank Gauging System FR 81076Saber MarzoukPas encore d'évaluation
- Telerep Epoxy: Sur Le ProcédéDocument14 pagesTelerep Epoxy: Sur Le ProcédéAmel RADJEFPas encore d'évaluation
- Paradiene S 5-11-2167 Document Technique ApplicationDocument66 pagesParadiene S 5-11-2167 Document Technique Applicationcakes gâteauxPas encore d'évaluation
- R Rep SM.2028 2 2017 PDF FDocument64 pagesR Rep SM.2028 2 2017 PDF Fblaise.nsomPas encore d'évaluation
- Runaway WeatherDocument24 pagesRunaway WeathervalentyPas encore d'évaluation
- 1 VideosurDocument177 pages1 VideosurZura KwizeraPas encore d'évaluation
- Déploiement Réseau 2G-3GDocument63 pagesDéploiement Réseau 2G-3GRACHID94% (49)
- Erdf Pro Rac - 20eDocument24 pagesErdf Pro Rac - 20eVGCCPas encore d'évaluation
- AO N 20 2017 Acquisition Et Installation D Un Systeme de Video SurveillanceDocument36 pagesAO N 20 2017 Acquisition Et Installation D Un Systeme de Video SurveillancebsdygswdywPas encore d'évaluation
- Reporting pilier 3 de solvabilité II: Guide pour la production des QRTD'EverandReporting pilier 3 de solvabilité II: Guide pour la production des QRTPas encore d'évaluation
- Contrats et marchés publics de défenseD'EverandContrats et marchés publics de défenseÉvaluation : 5 sur 5 étoiles5/5 (1)
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
- Afrique numérique: Transformation technologique pour l'emploiD'EverandAfrique numérique: Transformation technologique pour l'emploiPas encore d'évaluation
- Réseaux mobiles et satellitaires: Principes, calculs et simulationsD'EverandRéseaux mobiles et satellitaires: Principes, calculs et simulationsPas encore d'évaluation
- Cours - Technologie ÉlectriqueDocument36 pagesCours - Technologie ÉlectriqueOuedraogo HassanePas encore d'évaluation
- Technicien de Maintenance en Chauffage Ventilation Et ClimatisationDocument3 pagesTechnicien de Maintenance en Chauffage Ventilation Et ClimatisationGastov GhassenPas encore d'évaluation
- Wissal RabahDocument8 pagesWissal RabahHEDIIIPas encore d'évaluation
- Chapitre 2 4pDocument32 pagesChapitre 2 4pFiras KachroudiPas encore d'évaluation
- MasterfelpDocument8 pagesMasterfelpCARLOS ANDRES BERNAL RODRIGUEZPas encore d'évaluation
- Cours 2 Fibre OptiqueDocument6 pagesCours 2 Fibre OptiqueFaty GueyePas encore d'évaluation
- Cen CLC Iso Iec TS 17021-3 2016Document12 pagesCen CLC Iso Iec TS 17021-3 2016Hermann A. TONHONPas encore d'évaluation
- Offre Technique - Travaux D'amenagement Et Remise en ConformitéDocument33 pagesOffre Technique - Travaux D'amenagement Et Remise en ConformitéDavidPas encore d'évaluation
- CindyniqueDocument3 pagesCindyniqueSilvia JaimesPas encore d'évaluation
- Compte RenduDocument1 pageCompte RendumarouenPas encore d'évaluation
- Exercices Excel 2000 - Tome 2Document102 pagesExercices Excel 2000 - Tome 2MDADAPas encore d'évaluation
- Livraison Par Geodis Secteur TextileDocument3 pagesLivraison Par Geodis Secteur Textilemoi149Pas encore d'évaluation
- Passage D Un Moteur 4D56 100cv en 115cvDocument20 pagesPassage D Un Moteur 4D56 100cv en 115cvCarlos VelascoPas encore d'évaluation
- Microsoft Office Directeur D'écoleDocument2 pagesMicrosoft Office Directeur D'écoleInformatiqueEducationPas encore d'évaluation
- Fiche de TP PointeursDocument4 pagesFiche de TP PointeursBERROUANEPas encore d'évaluation
- Intégration D'energie RenoublDocument21 pagesIntégration D'energie RenoublMzg NoorPas encore d'évaluation
- Memoire - FinalDocument83 pagesMemoire - FinalKhadija BelkasPas encore d'évaluation
- Emploi Du Temps M1 HSIDocument1 pageEmploi Du Temps M1 HSIYounes BlkPas encore d'évaluation
- Présentation D'une Boutique de Quartier Au Cameroun Dans La Ville de YaoundéDocument22 pagesPrésentation D'une Boutique de Quartier Au Cameroun Dans La Ville de YaoundéGabriel MonsieurPas encore d'évaluation
- Ac 989 Port-BouetDocument56 pagesAc 989 Port-BouetAIME KOULOUPas encore d'évaluation
- Guide Pour La Constitution Des Dossiers Pour L'émission de La Monnaie Électronique Par Les Trésors Publics NationauxDocument26 pagesGuide Pour La Constitution Des Dossiers Pour L'émission de La Monnaie Électronique Par Les Trésors Publics NationauxChamgwei IzuzuPas encore d'évaluation
- Exercices de RivisionDocument10 pagesExercices de RivisionOnsPas encore d'évaluation
- Economie Numerique Partie1Document30 pagesEconomie Numerique Partie1Seydou TourePas encore d'évaluation
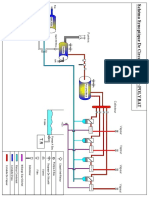
- Schéma Synoptique de Circuit de Vapeur POLYBATDocument1 pageSchéma Synoptique de Circuit de Vapeur POLYBATZribi AmeniPas encore d'évaluation
- Exercices TransistorDocument2 pagesExercices Transistorمسلمة حرةPas encore d'évaluation
- Document PDFDocument20 pagesDocument PDFanass sbniPas encore d'évaluation
- PC Astuces - Protéger Ses Enfants Sous Windows 7Document4 pagesPC Astuces - Protéger Ses Enfants Sous Windows 7Polovsky MG GodenPas encore d'évaluation
- Exemple de CDCDocument8 pagesExemple de CDCtahaelayaPas encore d'évaluation
- Choix Outil ReportingDocument4 pagesChoix Outil ReportingJihad MifdalPas encore d'évaluation
- Android France FR 2009-12-23 Integrer Des Pub Admob Dans SesDocument17 pagesAndroid France FR 2009-12-23 Integrer Des Pub Admob Dans SesYoussef AddiPas encore d'évaluation