Vous aimerez peut-être aussi
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Commande Optimale Chap 1Document28 pagesCommande Optimale Chap 1Joscelyn SadikiPas encore d'évaluation
- M1 Poly PDFDocument83 pagesM1 Poly PDFChaima ChPas encore d'évaluation
- Cours Proc AléatoireDocument73 pagesCours Proc AléatoireMennad MennadPas encore d'évaluation
- PolyDocument55 pagesPolyDjoumana SalemiPas encore d'évaluation
- AutomatiqueDocument33 pagesAutomatiqueOussama MessaoudiPas encore d'évaluation
- Commande Des Systèmes LinéairesDocument91 pagesCommande Des Systèmes Linéairesعبد الله الجزائريPas encore d'évaluation
- ANALYSE ET COMMANDE de Systems DynamicsDocument230 pagesANALYSE ET COMMANDE de Systems DynamicsjavbejaranoPas encore d'évaluation
- Syndicats, salaires et conjoncture économique: L'expérience des fronts communs du secteur public québécois de 1971 à 1983D'EverandSyndicats, salaires et conjoncture économique: L'expérience des fronts communs du secteur public québécois de 1971 à 1983Pas encore d'évaluation
- Modélisation Et Identification Des Systèmes DynamiquesDocument61 pagesModélisation Et Identification Des Systèmes DynamiquesGrine Salah Eddine100% (4)
- Revise PolyDocument300 pagesRevise PolyAmina BELABIDPas encore d'évaluation
- Analyse NumeriqueDocument72 pagesAnalyse Numeriquehamzaoui612Pas encore d'évaluation
- Automatique Avancee PDFDocument136 pagesAutomatique Avancee PDFElMignonnaPas encore d'évaluation
- Poly NonLineaire 2021-2022 1Document51 pagesPoly NonLineaire 2021-2022 1gilbermichaelPas encore d'évaluation
- Pasapas ExemplesDocument32 pagesPasapas Exemplesparodiaz87Pas encore d'évaluation
- Modélisation Des Systèmes Dynamiques Continus: Cours de Cds2 Chapitre I 2 AnnéeDocument14 pagesModélisation Des Systèmes Dynamiques Continus: Cours de Cds2 Chapitre I 2 AnnéeRoch d'ARGAIGNONPas encore d'évaluation
- Poly SleDocument98 pagesPoly SleHajri MohamedPas encore d'évaluation
- Chapitre IIDocument26 pagesChapitre IIOussama TouatiPas encore d'évaluation
- Représentation D'etat Des Systèmes LinéairesDocument28 pagesReprésentation D'etat Des Systèmes Linéairesoussamabouchouicha9Pas encore d'évaluation
- Cours RN PDFDocument288 pagesCours RN PDFAnonymous 94KtR5Pas encore d'évaluation
- RegdevoirL2GM - 2021 - S1 Version3-VfDocument5 pagesRegdevoirL2GM - 2021 - S1 Version3-Vfamirtoukabri111Pas encore d'évaluation
- Cours de La Mécanique Quantique IIDocument70 pagesCours de La Mécanique Quantique IIjojhuuwnntePas encore d'évaluation
- Asservissement Et Régulation ContinusDocument54 pagesAsservissement Et Régulation ContinusJamii MohamedPas encore d'évaluation
- Alazard 2248Document74 pagesAlazard 2248Kawther BenPas encore d'évaluation
- Poly CNDocument80 pagesPoly CNkofostcePas encore d'évaluation
- Cours 1Document50 pagesCours 1Nissrine RidaPas encore d'évaluation
- Poly SLRS v20141215Document42 pagesPoly SLRS v20141215Bouazza EL WAHBIPas encore d'évaluation
- Cours Series Temporelles AbDocument43 pagesCours Series Temporelles AbAgossou Alex AgbahidePas encore d'évaluation
- SI101poly201003 PDFDocument92 pagesSI101poly201003 PDFDaha AhmedPas encore d'évaluation
- AI2 Notes de CoursDocument67 pagesAI2 Notes de Courssakhir sarrPas encore d'évaluation
- Seri Chro PDFDocument41 pagesSeri Chro PDFAhmed TalbiPas encore d'évaluation
- ST CoursDocument50 pagesST CoursIslem Ahlem Khefacha100% (1)
- ConservationDocument38 pagesConservationNkurunziza DenisPas encore d'évaluation
- 2015 09 04 Cours ET 1A ImpDocument63 pages2015 09 04 Cours ET 1A ImpFarhat ThamerPas encore d'évaluation
- Cour Prof PDFDocument56 pagesCour Prof PDFtheHBDZPas encore d'évaluation
- Analyse Des Signa Note de Cours PDFDocument225 pagesAnalyse Des Signa Note de Cours PDFHamza SmahriPas encore d'évaluation
- Aut GM PDFDocument80 pagesAut GM PDFBrahim HammamiPas encore d'évaluation
- Cours - Thermochimie2 Fev 2020Document107 pagesCours - Thermochimie2 Fev 2020nabil saffajPas encore d'évaluation
- Cours - Régulation Automatique AnalogiqueDocument276 pagesCours - Régulation Automatique Analogiqueautsi100% (1)
- Series Temp RDocument111 pagesSeries Temp RHervé MUKADIPas encore d'évaluation
- C PrédictiveDocument22 pagesC PrédictiveÜbü NtüPas encore d'évaluation
- Ac321 2009 PDFDocument92 pagesAc321 2009 PDFHamzaKadPas encore d'évaluation
- Cours Signaux Et Système AriouiDocument121 pagesCours Signaux Et Système Ariouikima lachgarPas encore d'évaluation
- Cours SlciDocument45 pagesCours SlcimassiPas encore d'évaluation
- Dynamique SDrapier Nov2009Document195 pagesDynamique SDrapier Nov2009Yassine KandoussiPas encore d'évaluation
- Poly Robotique 3gecapi 2023 2024Document51 pagesPoly Robotique 3gecapi 2023 2024diaguely.sylla.etu21Pas encore d'évaluation
- Dynamique Des Solides Et Des Structures (Mines SE)Document193 pagesDynamique Des Solides Et Des Structures (Mines SE)Agent 47Pas encore d'évaluation
- Matlab SignauxDocument22 pagesMatlab SignauxFayçal Belkessam100% (1)
- Multi EntreesDocument47 pagesMulti EntreesKawther BenPas encore d'évaluation
- Dbut Livre PDFDocument18 pagesDbut Livre PDFTamokouePas encore d'évaluation
- Cours Mécanique Quantique S5Document71 pagesCours Mécanique Quantique S5Omar OmarPas encore d'évaluation
- Diagramme de Campbell - Code AsterDocument9 pagesDiagramme de Campbell - Code AsterakhourchPas encore d'évaluation
- Mécanique Des Milieux ContinusDocument100 pagesMécanique Des Milieux ContinusiftstpbdiroPas encore d'évaluation
- Transforme de FourierDocument19 pagesTransforme de FourierakitaPas encore d'évaluation
- Circuit HydrauliqDocument90 pagesCircuit Hydrauliqsafwen ranenPas encore d'évaluation
- e 1200 H21 TXDocument213 pagese 1200 H21 TXLidia PopaPas encore d'évaluation
- XMLRPCDocument4 pagesXMLRPCElhadji Malick GayePas encore d'évaluation
- STR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1Document1 pageSTR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1dimitri tchabouPas encore d'évaluation
- Choix D'un Vérin PDFDocument2 pagesChoix D'un Vérin PDFKarem JebrilPas encore d'évaluation
- Tutoriel Etablissements Origine Adele FRDocument7 pagesTutoriel Etablissements Origine Adele FRPamela TitoPas encore d'évaluation
- IsostatismeDocument36 pagesIsostatismedidinedPas encore d'évaluation
- 5156 Tfca U11 13 Dossier SujetDocument7 pages5156 Tfca U11 13 Dossier SujetFawzi HelouPas encore d'évaluation
- Cours Sur Le Disque DurDocument11 pagesCours Sur Le Disque DurHabib FayePas encore d'évaluation
- CIABO ASP Presentation Des Travaux SDM01!02!07!08!09 Odpe Ageroute + AnnexesDocument94 pagesCIABO ASP Presentation Des Travaux SDM01!02!07!08!09 Odpe Ageroute + AnnexesbossPas encore d'évaluation
- As 70671 LR-Z SG 470FR FR 1056-2Document2 pagesAs 70671 LR-Z SG 470FR FR 1056-2a.ghani BaRaCuDaPas encore d'évaluation
- Note de Calcul PoutreDocument6 pagesNote de Calcul PoutreAno Nymous ProPas encore d'évaluation
- L'Usine Marémotrice de La RanceDocument45 pagesL'Usine Marémotrice de La RanceSalem ARIFPas encore d'évaluation
- Examen Mecanique Du SolDocument2 pagesExamen Mecanique Du SolgoboPas encore d'évaluation
- 4 HG0201 Enonce PDFDocument2 pages4 HG0201 Enonce PDFbougherara100% (1)
- DS de Thermodynamique Avec QCM Du 19 Janvier 2013 + CorrigéDocument10 pagesDS de Thermodynamique Avec QCM Du 19 Janvier 2013 + CorrigéRodrigue patrice Njounhassi koagnePas encore d'évaluation
- 760 PontsDocument74 pages760 PontsSarrauste JulienPas encore d'évaluation
- PcastucesDocument108 pagesPcastucesmohamed rifkiPas encore d'évaluation
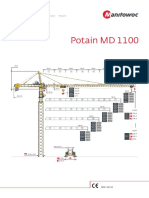
- R3t1fnhswjbl9uxvpotain MD 1100 Tower Crane NetworkDocument8 pagesR3t1fnhswjbl9uxvpotain MD 1100 Tower Crane Networkubeydullah coşkunPas encore d'évaluation
- 4-FT Technoseal 20 VV 60 F.FDocument2 pages4-FT Technoseal 20 VV 60 F.Fconstantine2008Pas encore d'évaluation
- Cours Simplifie La Liaison CompleteDocument3 pagesCours Simplifie La Liaison CompleteMohammed DahbiPas encore d'évaluation
- Cours C++Document501 pagesCours C++Sara AbPas encore d'évaluation
- IND2201 PresentationDocument2 pagesIND2201 PresentationCharles-André GuénettePas encore d'évaluation
- Poteaux en Béton Pour Lignes Électriques Aériennes: Specification TechniqueDocument8 pagesPoteaux en Béton Pour Lignes Électriques Aériennes: Specification TechniqueKaoutar El-ghazouiPas encore d'évaluation
- L'artichaut de Madagascar Aux PommuiesDocument7 pagesL'artichaut de Madagascar Aux Pommuiesfrederic bertrandPas encore d'évaluation
- TC Qqla 27464Document174 pagesTC Qqla 27464Sabri Naima GhoutiaPas encore d'évaluation
- Analyse Fonctionnel PROJETDocument8 pagesAnalyse Fonctionnel PROJETMajda BelkhaouiPas encore d'évaluation
- Renoform TD 2010Document2 pagesRenoform TD 2010angel de mi guardaPas encore d'évaluation
- TDN°4 FiltrageDocument2 pagesTDN°4 FiltrageIsmail Lasri100% (1)
- Beton Arme Cours Complet Chap9 PDFDocument47 pagesBeton Arme Cours Complet Chap9 PDFTOVIHO SessinouPas encore d'évaluation
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Les LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!D'EverandLes LES TRUCS MATHEMATIQUES AU PRIMAIRE: et si on leur donnait du sens!Évaluation : 2 sur 5 étoiles2/5 (1)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Mathématiques et Mathématiciens Pensées et CuriositésD'EverandMathématiques et Mathématiciens Pensées et CuriositésÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- Les 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonD'EverandLes 10 Secrets pour une Vie Plus Heureuse avec la Maladie de ParkinsonPas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Historique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesD'EverandHistorique et description des procédés du daguerréotype et du diorama: Essai historique sur les sciences et techniquesPas encore d'évaluation
- Enjeux contemporains de l'éducation scientifique et technologiqueD'EverandEnjeux contemporains de l'éducation scientifique et technologiqueAbdelkrim HasniPas encore d'évaluation
- Le must bilingue™ du lycéen Vol. 2 - les maths en anglaisD'EverandLe must bilingue™ du lycéen Vol. 2 - les maths en anglaisPas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation