Vous aimerez peut-être aussi
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- TP AutomatiqueDocument24 pagesTP AutomatiqueFahdPas encore d'évaluation
- TP1 - SLM - Initiation À Matlab Control ToolboxDocument2 pagesTP1 - SLM - Initiation À Matlab Control ToolboxNorhan AsiyePas encore d'évaluation
- Linux Octave TD4 SOLUTIONSDocument3 pagesLinux Octave TD4 SOLUTIONSKevin BOURGEOISPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Animation MapleDocument23 pagesAnimation MapleAchraf SOUNNIPas encore d'évaluation
- Initiation Matlab - Simulink 2020Document17 pagesInitiation Matlab - Simulink 2020rajaa latifiPas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- TD1 1année LMD SNV 18 19Document1 pageTD1 1année LMD SNV 18 19Doudou Amine100% (2)
- TP Diagraphie en Milieux PoreuxDocument11 pagesTP Diagraphie en Milieux PoreuxMohamed OussamaPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Solution Des Exercices C/C++Document135 pagesSolution Des Exercices C/C++Wassim NostraPas encore d'évaluation
- 6EP1 Math Travail2 CoursDocument32 pages6EP1 Math Travail2 CoursDavid FonadaPas encore d'évaluation
- Série TP RévisonsDocument5 pagesSérie TP RévisonsSoundous TayssirPas encore d'évaluation
- Chapitre1 Méthodes Numériques Et ProgrammationDocument8 pagesChapitre1 Méthodes Numériques Et ProgrammationTaki EddinePas encore d'évaluation
- TD ConiqueDocument5 pagesTD ConiqueBertino DidahPas encore d'évaluation
- 1.laboratorio Matlab BasicoDocument8 pages1.laboratorio Matlab BasicoM4Gn3tOPas encore d'évaluation
- Mat Lab CoursDocument16 pagesMat Lab CoursGroniston DoréméPas encore d'évaluation
- TP03Document1 pageTP03Reda SellahiPas encore d'évaluation
- Analyse Treillis MEF by MSC PatientoDocument30 pagesAnalyse Treillis MEF by MSC PatientoPatiento MbayoPas encore d'évaluation
- Série1 Automatique 23 24Document4 pagesSérie1 Automatique 23 24mehdibenkalia5Pas encore d'évaluation
- Exercice 1 MathDocument2 pagesExercice 1 Mathcours fsjesPas encore d'évaluation
- Cours Scilab - 2Document43 pagesCours Scilab - 2Idris IlungaPas encore d'évaluation
- TP N°1 Initiation A MatlabDocument10 pagesTP N°1 Initiation A Matlabhiba zayaniPas encore d'évaluation
- Corrigé TP2-1Document3 pagesCorrigé TP2-1cxtx28kmqmPas encore d'évaluation
- TP OssDocument5 pagesTP OssJosephine NoroPas encore d'évaluation
- Matlab 1Document49 pagesMatlab 1Najlae LahlaliPas encore d'évaluation
- Cours MatlabDocument23 pagesCours Matlabmidod692Pas encore d'évaluation
- TD 4 CorrigeDocument12 pagesTD 4 CorrigeGENIUS TVPas encore d'évaluation
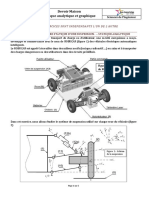
- DM Statique Analytique GraphiqueDocument5 pagesDM Statique Analytique GraphiqueFlav MPas encore d'évaluation
- CHAP 1 - Programmer Avec MatlabDocument124 pagesCHAP 1 - Programmer Avec MatlabBouz. TimaPas encore d'évaluation
- 1S Exercices Fonctions Corriges 2Document55 pages1S Exercices Fonctions Corriges 2SegaAlainCoulibaly100% (1)
- Bac Tsexp Math 2015 CorrectionDocument5 pagesBac Tsexp Math 2015 Correctionhtstore223Pas encore d'évaluation
- TP9 CorrigeDocument6 pagesTP9 CorrigeKhaled JberiPas encore d'évaluation
- Cours MatlabDocument25 pagesCours MatlabKacimi Saber AyoubPas encore d'évaluation
- Optimisation de Modeles de Propagation A Partir Des Donnees de Mesures Radio de La Ville de YaoundeDocument6 pagesOptimisation de Modeles de Propagation A Partir Des Donnees de Mesures Radio de La Ville de YaoundekamelPas encore d'évaluation
- 32... Examen ASD3 2020 Avec SolutionDocument6 pages32... Examen ASD3 2020 Avec SolutionHidaoui AbdPas encore d'évaluation
- Chapitre1-Etudiant CompletDocument35 pagesChapitre1-Etudiant CompletJawaher Ghannouchi0% (1)
- Traitement de SignalDocument27 pagesTraitement de SignalFahdPas encore d'évaluation
- Algorithmique Et Structure de Donnees IDocument34 pagesAlgorithmique Et Structure de Donnees IPréncess MériixXà100% (1)
- TP Analyse Numerique1 PDFDocument14 pagesTP Analyse Numerique1 PDFAlexis JamesPas encore d'évaluation
- Exam-Arch 2010Document6 pagesExam-Arch 2010abir cherifPas encore d'évaluation
- Automatique TPDocument26 pagesAutomatique TPFahdPas encore d'évaluation
- Intro Matlab PDFDocument11 pagesIntro Matlab PDFabdou ahmedPas encore d'évaluation
- BTS 2023 Mathématiques Groupe B3Document9 pagesBTS 2023 Mathématiques Groupe B3LETUDIANTPas encore d'évaluation
- Poo 1 TD1&2Document4 pagesPoo 1 TD1&2instagram comPas encore d'évaluation
- 0ASD3 I2 Examen TD S3 2022 2023 CorrDocument4 pages0ASD3 I2 Examen TD S3 2022 2023 CorrOuzaid 3imadPas encore d'évaluation
- TP1 CorrDocument3 pagesTP1 CorrAnassPas encore d'évaluation
- MendeDocument14 pagesMendeDilekh AnisPas encore d'évaluation
- TP Régulation Des Systèmes Linéaires Et ContinusDocument14 pagesTP Régulation Des Systèmes Linéaires Et Continusdelyonkamdem1999Pas encore d'évaluation
- T1CMATH00098 Sujet79Document8 pagesT1CMATH00098 Sujet79Mimi cheesePas encore d'évaluation
- Initiation MatLabDocument31 pagesInitiation MatLabHamzaHariatePas encore d'évaluation
- Activite Pratique BGDocument11 pagesActivite Pratique BGYassine OULAASRIPas encore d'évaluation
- DEVOIR (AKOUEHOU, BONOU Habib, DANSOU Giovanni, ZINSOU Karl)Document14 pagesDEVOIR (AKOUEHOU, BONOU Habib, DANSOU Giovanni, ZINSOU Karl)dfe100% (1)
- Cours Matlab2Document26 pagesCours Matlab2Yassine EL FAKHAOUIPas encore d'évaluation
- Commande Par Mode Hybride111Document13 pagesCommande Par Mode Hybride111Muhammad BneijaraPas encore d'évaluation
- Manuel de Vol C 150 PDFDocument43 pagesManuel de Vol C 150 PDFjmlezcanoPas encore d'évaluation
- Formation Methode HaccpDocument111 pagesFormation Methode HaccpTIEBE SERGESPas encore d'évaluation
- Cat Moteurs BeDocument196 pagesCat Moteurs Benabil loutfi100% (1)
- Chapitre 7 Les Couts LogistiquesDocument2 pagesChapitre 7 Les Couts LogistiquesMohamedPas encore d'évaluation
- Note de Calcul NabDocument5 pagesNote de Calcul NabLyes AlgerianoPas encore d'évaluation
- Le Contrat de Transport International 2022Document10 pagesLe Contrat de Transport International 2022Amina ChiahiPas encore d'évaluation
- Cours Ingenierie SystemeDocument67 pagesCours Ingenierie Systemeoussama elhjoujiPas encore d'évaluation
- Modele Acte D'engagementDocument2 pagesModele Acte D'engagementzak.sb22Pas encore d'évaluation
- VOTRE ORDINATEUR 03 1984-01-02 (Acme)Document92 pagesVOTRE ORDINATEUR 03 1984-01-02 (Acme)Taranis35Pas encore d'évaluation
- Rapport 1Document13 pagesRapport 1Safwen BoufaidPas encore d'évaluation
- Plaquette Ouvrages Ralentissement Crues VilaineDocument6 pagesPlaquette Ouvrages Ralentissement Crues Vilainemetalika_1981Pas encore d'évaluation
- Cps MarchéDocument22 pagesCps Marchéyoussef benaniPas encore d'évaluation
- Myfrenchbank Christophe CarreDocument1 pageMyfrenchbank Christophe CarreyomanhcPas encore d'évaluation
- Cours de Fiscalitã© Internationale 2022 2023 PDFDocument164 pagesCours de Fiscalitã© Internationale 2022 2023 PDFSirine JabesPas encore d'évaluation
- TEST Connaissance PLSQLDocument3 pagesTEST Connaissance PLSQLFORMATION ORADISTPas encore d'évaluation
- MAH4444Document139 pagesMAH4444بلقاسم جلاليPas encore d'évaluation
- L'entreprise Les Relations Entre Propriétaires Dirigeants Et Employés.Document4 pagesL'entreprise Les Relations Entre Propriétaires Dirigeants Et Employés.Francesca GermainPas encore d'évaluation
- 0002 3 10.1generalitesDocument103 pages0002 3 10.1generalitesJason CruisePas encore d'évaluation
- Gestion Des RDV - Cahier de ChargeDocument4 pagesGestion Des RDV - Cahier de ChargeAdalou NIAONEPas encore d'évaluation
- 2020 Sustainable Agriculture Standard - Farm Requirements - Rainforest Alliance FRDocument91 pages2020 Sustainable Agriculture Standard - Farm Requirements - Rainforest Alliance FRkouame gerard kouamePas encore d'évaluation
- Document 575912Document142 pagesDocument 575912Abass DialloPas encore d'évaluation
- Exercices Mtcna - Module 1 - V1Document9 pagesExercices Mtcna - Module 1 - V1Garry Moore100% (1)
- Druanti The Arch-Revenant: Liste de CadeauxDocument1 pageDruanti The Arch-Revenant: Liste de CadeauxAntoine ForitesPas encore d'évaluation
- MS311 MS391Document94 pagesMS311 MS391Bruno DenollePas encore d'évaluation
- Résumé ImpedanceDocument7 pagesRésumé Impedancehelmi copy centerPas encore d'évaluation
- VALEO - Ignition Spare Parts 2007 PDFDocument636 pagesVALEO - Ignition Spare Parts 2007 PDFgeorge_scala100% (1)
- Entre TienDocument16 pagesEntre TienKawtarSoloPas encore d'évaluation
- La Phrase - La Forme Affirmative Et La Forme Négative - MaxicoursDocument4 pagesLa Phrase - La Forme Affirmative Et La Forme Négative - MaxicoursTOUTA TOTOPas encore d'évaluation
- Examen Ro 21Document1 pageExamen Ro 21صنع في المنزل Made at homePas encore d'évaluation
- Cours Droit GOZZIDocument32 pagesCours Droit GOZZINicoleta BusuiocPas encore d'évaluation