Vous aimerez peut-être aussi
- Python pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingD'EverandPython pour les hackers : Le guide des script kiddies : apprenez à créer vos propres outils de hackingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Livre PDFDocument166 pagesLivre PDFviviana100% (7)
- Cours Systemes Embarques PDFDocument50 pagesCours Systemes Embarques PDFHichem Taghouti67% (3)
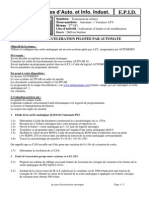
- Exercices de Programmation TIA Step7Document4 pagesExercices de Programmation TIA Step7faqdani75% (4)
- Expresiones Coloquiales en FrancésDocument5 pagesExpresiones Coloquiales en FrancésPaul DaugentePas encore d'évaluation
- 604 S - Eléments de Technologie CAT PDFDocument61 pages604 S - Eléments de Technologie CAT PDFHugo Tia100% (4)
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséJIHENE GHAOUIPas encore d'évaluation
- ArduinoDocument12 pagesArduinonouhayla nouhaylaPas encore d'évaluation
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséOmar BoujelbenPas encore d'évaluation
- Test72 Sport 3108Document15 pagesTest72 Sport 3108Rakotojaona HajanirinaPas encore d'évaluation
- Systeme de LevageDocument5 pagesSysteme de LevageElmokh LassaadPas encore d'évaluation
- Arduino #30 - PWM de La Théorie À La Pratique Avec ArduinoDocument7 pagesArduino #30 - PWM de La Théorie À La Pratique Avec ArduinoRnav rnavPas encore d'évaluation
- Arduino #30 - PWM de La Théorie À La Pratique Avec ArduinoDocument7 pagesArduino #30 - PWM de La Théorie À La Pratique Avec Arduinochef.dpt.adjoint.eltPas encore d'évaluation
- Solution ExamenDocument3 pagesSolution ExamenAbdo HamaniPas encore d'évaluation
- Chapitre 3 Application ArduinoDocument4 pagesChapitre 3 Application ArduinoNesrine Zouari100% (1)
- TD1 Informatique IndustrielleDocument17 pagesTD1 Informatique IndustrielleToto Le boPas encore d'évaluation
- TP Arduino N0Document11 pagesTP Arduino N0Amira Jebali100% (1)
- Arduino #34 - PWM Comment Mesurer La Valeur Moyenne Et La Valeur Efficace D&rsquo Un Signal PWMDocument5 pagesArduino #34 - PWM Comment Mesurer La Valeur Moyenne Et La Valeur Efficace D&rsquo Un Signal PWMRnav rnavPas encore d'évaluation
- Annexe Micro PythonDocument2 pagesAnnexe Micro PythonKAIS TABOUBIPas encore d'évaluation
- Rapport de La Simulation Du TPDocument11 pagesRapport de La Simulation Du TPmohamed oukiliPas encore d'évaluation
- PWMDocument11 pagesPWMYOKO SawaPas encore d'évaluation
- Rapport Autonomie FAYE VIVETDocument10 pagesRapport Autonomie FAYE VIVETMichel Massamba FayePas encore d'évaluation
- Automate Programmable C2Document19 pagesAutomate Programmable C2214043Pas encore d'évaluation
- TP #4: Utilisation Des Servomoteurs Avec Arduino: Projet de Fin de CycleDocument2 pagesTP #4: Utilisation Des Servomoteurs Avec Arduino: Projet de Fin de CycleBobby StayPas encore d'évaluation
- SujetTP1Document10 pagesSujetTP1victorbix36Pas encore d'évaluation
- 5 - Diapo APIDocument31 pages5 - Diapo APItimo timoPas encore d'évaluation
- Drone Bicopter – Contrôleur - Régulateur PIDocument19 pagesDrone Bicopter – Contrôleur - Régulateur PIKamologne UlrichPas encore d'évaluation
- Partie PratiqueDocument10 pagesPartie PratiqueHàjàr KcimPas encore d'évaluation
- 05 01 ServomoteurDocument7 pages05 01 ServomoteurSalem SaidiPas encore d'évaluation
- Tuto PspiceDocument10 pagesTuto PspicevikinnnPas encore d'évaluation
- Polycopié de TP API M1 2024Document18 pagesPolycopié de TP API M1 2024ghanemadel177Pas encore d'évaluation
- Bases ArduinoDocument7 pagesBases Arduinojulien tixadorPas encore d'évaluation
- TP4 - Mise en Oeuvre Du CAN de L'arduino UNODocument6 pagesTP4 - Mise en Oeuvre Du CAN de L'arduino UNOHïxam SbaïPas encore d'évaluation
- Drone - Aduino #3 - Contrôleur ESC Du Moteur Brushless Avec ArduinoDocument2 pagesDrone - Aduino #3 - Contrôleur ESC Du Moteur Brushless Avec ArduinoMohamed Raou100% (1)
- PSoC GuideDocument36 pagesPSoC GuidetatiPas encore d'évaluation
- RAPPORT TP PICos18 G6 LASRI OULAASRIDocument28 pagesRAPPORT TP PICos18 G6 LASRI OULAASRIYassine OULAASRIPas encore d'évaluation
- Projet Onduleur Triphasé Commande SPWM (MLI)Document8 pagesProjet Onduleur Triphasé Commande SPWM (MLI)ZoTech MadagascarPas encore d'évaluation
- Simulation Des ConvertisseursDocument9 pagesSimulation Des Convertisseurslonsaiy100% (1)
- PID - Implémentation Du Correcteur Avec Arduino #3Document11 pagesPID - Implémentation Du Correcteur Avec Arduino #3Kamologne UlrichPas encore d'évaluation
- Implémentation de La Boucle D'asservissement D'un Drone Bicopter Avec ArduinoDocument20 pagesImplémentation de La Boucle D'asservissement D'un Drone Bicopter Avec ArduinoKamologne UlrichPas encore d'évaluation
- Cours - Génie Électrique API - Bac Technique (2012-2013) MR Aïssa PDFDocument12 pagesCours - Génie Électrique API - Bac Technique (2012-2013) MR Aïssa PDFYessineKammounPas encore d'évaluation
- AutomatesDocument47 pagesAutomatesYoussef ElalaouiPas encore d'évaluation
- Bendaha TP HADocument65 pagesBendaha TP HAraouf100% (3)
- Microcontroleurs PDFDocument16 pagesMicrocontroleurs PDFDriss SatePas encore d'évaluation
- 3-Principe de Programmation AnalogiqueDocument13 pages3-Principe de Programmation AnalogiquewalidjafPas encore d'évaluation
- TP 1 Elt624 PDFDocument6 pagesTP 1 Elt624 PDFHa KouPas encore d'évaluation
- 8 Convertisseur Adc DacDocument11 pages8 Convertisseur Adc Dacmiss théciPas encore d'évaluation
- 04 Power Board PWM Moteurs 1Document46 pages04 Power Board PWM Moteurs 1Jamal KhyatPas encore d'évaluation
- STR - TP-1 - Travaux PratiquesDocument12 pagesSTR - TP-1 - Travaux Pratiquesfellah baha eddinePas encore d'évaluation
- MG90S Micro Servomotor - FRDocument18 pagesMG90S Micro Servomotor - FRPI PICOPas encore d'évaluation
- Caracteristiques Et Pilotage Motoreducteur - EleveDocument8 pagesCaracteristiques Et Pilotage Motoreducteur - ElevePhilippe MortPas encore d'évaluation
- TP RégulationcourbeDocument9 pagesTP RégulationcourbeAchref MmaPas encore d'évaluation
- 3-Principe de Programmation AnalogiqueDocument13 pages3-Principe de Programmation AnalogiqueKhalil BelghiyatiPas encore d'évaluation
- TP Prise en Main UnityDocument10 pagesTP Prise en Main UnityNabil Lee100% (2)
- Correcteur PIDocument1 pageCorrecteur PIKARKAR NORAPas encore d'évaluation
- TR 5 II - EnoDocument3 pagesTR 5 II - EnoAIT KHOUYA YacinPas encore d'évaluation
- DS2019Document11 pagesDS2019Charles Thierry DIBAO ESSAKAPas encore d'évaluation
- TP Rame D Acceleration AutomgenDocument3 pagesTP Rame D Acceleration AutomgenKhalil BelghiyatiPas encore d'évaluation
- API Du Grafcet Au Ladder v3Document10 pagesAPI Du Grafcet Au Ladder v3Àdiil Tahouri85% (13)
- TP Afficheur 7 SegmentsDocument6 pagesTP Afficheur 7 Segmentslouisste78100Pas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Agricultural Industry Presentation TemplateDocument4 pagesAgricultural Industry Presentation TemplateKamologne UlrichPas encore d'évaluation
- Équipement Électrique: CaractéristiquesDocument50 pagesÉquipement Électrique: CaractéristiquessalimPas encore d'évaluation
- PID - Implémentation Du Correcteur Avec Arduino #3Document11 pagesPID - Implémentation Du Correcteur Avec Arduino #3Kamologne UlrichPas encore d'évaluation
- Bourses - 2022-2023 - Brochure ÉlectroniqueDocument69 pagesBourses - 2022-2023 - Brochure ÉlectroniqueSeptimus PierrePas encore d'évaluation
- Implémentation de La Boucle D'asservissement D'un Drone Bicopter Avec Arduino - Cours - Projets DiversDocument32 pagesImplémentation de La Boucle D'asservissement D'un Drone Bicopter Avec Arduino - Cours - Projets DiversKamologne UlrichPas encore d'évaluation
- Orniformation Bts Economie Generale 2015Document2 pagesOrniformation Bts Economie Generale 2015cedric LieutenaPas encore d'évaluation
- Aide Mémoire ESP - IDFDocument1 pageAide Mémoire ESP - IDFKamologne UlrichPas encore d'évaluation
- Orniformation Bts Economie Generale 2013Document2 pagesOrniformation Bts Economie Generale 2013Kamologne UlrichPas encore d'évaluation
- PID - Implémentation Du Correcteur Avec Arduino #3Document11 pagesPID - Implémentation Du Correcteur Avec Arduino #3Kamologne UlrichPas encore d'évaluation
- 7 Générer Un Rapport Exceptionnel À Partir D'un Classeur Excel Dans Power Bi DesktopDocument17 pages7 Générer Un Rapport Exceptionnel À Partir D'un Classeur Excel Dans Power Bi DesktopKamologne UlrichPas encore d'évaluation
- Orniformation Bts Corrige Expression Francaise 2010Document3 pagesOrniformation Bts Corrige Expression Francaise 2010Kamologne UlrichPas encore d'évaluation
- Aide Mémoire ESP - IDFDocument1 pageAide Mémoire ESP - IDFKamologne UlrichPas encore d'évaluation
- Etude ADIT 2005 Technopole Martinique-2Document80 pagesEtude ADIT 2005 Technopole Martinique-2Kamologne UlrichPas encore d'évaluation
- Sophie Villiers: Design D'Intérieur Salomon Et CIEDocument2 pagesSophie Villiers: Design D'Intérieur Salomon Et CIEKamologne UlrichPas encore d'évaluation
- 2 Qu'est Ce Que Power Bi DesktopDocument8 pages2 Qu'est Ce Que Power Bi DesktopKamologne UlrichPas encore d'évaluation
- Design Sans Titre4Document3 pagesDesign Sans Titre4Kamologne UlrichPas encore d'évaluation
- 7 Générer Un Rapport Exceptionnel À Partir D'un Classeur Excel Dans Power Bi DesktopDocument17 pages7 Générer Un Rapport Exceptionnel À Partir D'un Classeur Excel Dans Power Bi DesktopKamologne UlrichPas encore d'évaluation
- TECHNOPOLEDocument2 pagesTECHNOPOLEKamologne Ulrich100% (1)
- Guide Candidature 23-24Document19 pagesGuide Candidature 23-24Charaf SekhsoukhPas encore d'évaluation
- RAPPORT DE SAGE DU1 OriginalDocument55 pagesRAPPORT DE SAGE DU1 OriginalKamologne UlrichPas encore d'évaluation
- TP 1 TP 2Document4 pagesTP 1 TP 2Kamologne UlrichPas encore d'évaluation
- Conception D'un Autopilote Pour Un Drone Léger Type Quadri-RotorDocument111 pagesConception D'un Autopilote Pour Un Drone Léger Type Quadri-RotorKamologne UlrichPas encore d'évaluation
- FICHE Suivis Des Stagiaires 2022 V2Document3 pagesFICHE Suivis Des Stagiaires 2022 V2Kamologne UlrichPas encore d'évaluation
- 2021 2022 V1 Applications1 Elements Finis J GasparouxDocument7 pages2021 2022 V1 Applications1 Elements Finis J GasparouxNawel23 MLKPas encore d'évaluation
- Grève de La SNAVDocument27 pagesGrève de La SNAV68ardenPas encore d'évaluation
- Reussir Pas A Pas Dans LongrichDocument17 pagesReussir Pas A Pas Dans LongrichAbdoulaye OlaoyePas encore d'évaluation
- TP Final InitiationDocument10 pagesTP Final InitiationAgape LwanzoPas encore d'évaluation
- Cei FRDocument2 pagesCei FRelmoummyPas encore d'évaluation
- Reactualisation Etudes Impact Block CI PDFDocument252 pagesReactualisation Etudes Impact Block CI PDFAdikoDenzeyAnonhPas encore d'évaluation
- 04 Sigma Binome ChapitreDocument29 pages04 Sigma Binome ChapitrefbdbhdPas encore d'évaluation
- Propriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteDocument98 pagesPropriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteNoamNorkhat100% (1)
- Duo Pour Piano Et GuitareDocument4 pagesDuo Pour Piano Et Guitarecamilo sanabriaPas encore d'évaluation
- OrangeMoney Terms FRDocument26 pagesOrangeMoney Terms FRMVOGO FabienPas encore d'évaluation
- (1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. VallotDocument262 pages(1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. Vallotnvh92Pas encore d'évaluation
- Le Passage Du Résultat Comptable Au Résultat FiscalDocument138 pagesLe Passage Du Résultat Comptable Au Résultat Fiscalabouyoucef ABBAD100% (2)
- Đáp Án (Answer Key) Cuốn ETS 2019Document14 pagesĐáp Án (Answer Key) Cuốn ETS 2019Pham NguyenPas encore d'évaluation
- Ressources Formation PowerShell Niveau InitiationDocument89 pagesRessources Formation PowerShell Niveau InitiationHenri HemlePas encore d'évaluation
- H.248 Protocol FRDocument51 pagesH.248 Protocol FRAbdelilah Charboub100% (1)
- Facteurs Dinfluences ExternesDocument2 pagesFacteurs Dinfluences ExternesJean-Luc BastinPas encore d'évaluation
- Lexique - Les Nouvelles TechnologiesDocument3 pagesLexique - Les Nouvelles Technologiesmaria jesusPas encore d'évaluation
- CelluloseDocument36 pagesCelluloseYussef Daniel MontplaisirPas encore d'évaluation
- Cours MateriauxDocument6 pagesCours Materiauxbeey2001Pas encore d'évaluation
- Management DES ORGANISATIONS PubliquesDocument42 pagesManagement DES ORGANISATIONS PubliquesRandom AccountPas encore d'évaluation
- Administrateur Système & ApplicationDocument2 pagesAdministrateur Système & Applicationfokom talom gaetanPas encore d'évaluation
- Communique Officiel Punaise de LitDocument2 pagesCommunique Officiel Punaise de LitMohamed InnekidenePas encore d'évaluation
- Cahier de Technologie 1er Sec CouleurDocument145 pagesCahier de Technologie 1er Sec CouleurZied BaccarPas encore d'évaluation
- BclogoDocument31 pagesBclogonour1960Pas encore d'évaluation
- Plan de Ferraillage TablierDocument1 pagePlan de Ferraillage TablierFiras KorPas encore d'évaluation
- QCMS EntrainementDocument13 pagesQCMS EntrainementEchafaiPas encore d'évaluation