Vous aimerez peut-être aussi
- Page de Garde - MergedDocument162 pagesPage de Garde - MergedWADIE NEZARPas encore d'évaluation
- Pfe Canada PDFDocument197 pagesPfe Canada PDFMOUSSABENISAFPas encore d'évaluation
- 08 Guide Plancher SureleveDocument34 pages08 Guide Plancher SureleveSimou El MahmodiPas encore d'évaluation
- Paramètres Du Comportement Dynamique Des SolsDocument73 pagesParamètres Du Comportement Dynamique Des SolsMàhfoud MorsliPas encore d'évaluation
- Reservoirs Sous Pression Et SeismisiteDocument208 pagesReservoirs Sous Pression Et SeismisiteAnonymous 24lnhh100% (1)
- Memoire de Magister: Implication Du Projet Rpoa Sur La Conception Sismique Des Ponts en AlgerieDocument91 pagesMemoire de Magister: Implication Du Projet Rpoa Sur La Conception Sismique Des Ponts en AlgerieMohamed TabetPas encore d'évaluation
- Chapitre 3 - Les Fondations Superficielles Et Les Semelles Sur PieuxDocument92 pagesChapitre 3 - Les Fondations Superficielles Et Les Semelles Sur Pieuxteresarosalinda1Pas encore d'évaluation
- These Maineult BQDocument216 pagesThese Maineult BQHassen BaouebPas encore d'évaluation
- Mémoire de Master en Génie Civil Spécialité: Géotechnique: Universite Saad Dahleb de BlidaDocument118 pagesMémoire de Master en Génie Civil Spécialité: Géotechnique: Universite Saad Dahleb de BlidabockouPas encore d'évaluation
- 19-Guide Plancher SurélevéDocument34 pages19-Guide Plancher SurélevémohamedPas encore d'évaluation
- EPFL Vent Seisme Evaluation de L Action Determinante A La Base Des Refends PDFDocument50 pagesEPFL Vent Seisme Evaluation de L Action Determinante A La Base Des Refends PDFPala2014Pas encore d'évaluation
- R M WXWXWX M 'E T WXWXWX D E P: Oyaume Du Aroc Inistere de L Quipement Et Du Ransport Irection Des Quipements UblicsDocument34 pagesR M WXWXWX M 'E T WXWXWX D E P: Oyaume Du Aroc Inistere de L Quipement Et Du Ransport Irection Des Quipements Ublicsmido2112Pas encore d'évaluation
- Comparaison Entre Rps 2000 V2011 & Eurocode 8 Etude D'Une Clinique DentaireDocument61 pagesComparaison Entre Rps 2000 V2011 & Eurocode 8 Etude D'Une Clinique DentaireSamia AdnanePas encore d'évaluation
- Cours Mecanique Sols 2012Document106 pagesCours Mecanique Sols 2012Nishijo TakumiPas encore d'évaluation
- Massifde Fondation Ain SallahDocument31 pagesMassifde Fondation Ain SallahAliouane MhamedPas encore d'évaluation
- FinalDocument168 pagesFinalBorhane eddine DoghbalPas encore d'évaluation
- PRD1Document55 pagesPRD1Oumayma ElkanouniPas encore d'évaluation
- Méthodologie Des Calculs SismiquesDocument19 pagesMéthodologie Des Calculs Sismiquesroma JamanPas encore d'évaluation
- Calcul Capacité Portante A Partir CPT Et SPT - BAKOUR - Azzeddine-WebDocument197 pagesCalcul Capacité Portante A Partir CPT Et SPT - BAKOUR - Azzeddine-WebThokamak100% (6)
- Bases de La Mecanique Des Sols Sommaire Detaille Et Quelques PagesDocument7 pagesBases de La Mecanique Des Sols Sommaire Detaille Et Quelques PagesSchalom KOUNEDEDJIPas encore d'évaluation
- Ponts en Béton Précontraint Construits Par Encorbellements SuccessifsDocument276 pagesPonts en Béton Précontraint Construits Par Encorbellements SuccessifsChokri Bouelouednine100% (9)
- Polycopier Exploration Des Hydrocarbures Ameur Zaimeche OuafiDocument118 pagesPolycopier Exploration Des Hydrocarbures Ameur Zaimeche Ouafihalassa.elmountassir.billahelPas encore d'évaluation
- RR 39126 FRDocument46 pagesRR 39126 FRmagloire amivaPas encore d'évaluation
- 75 SGN 332 AmeDocument64 pages75 SGN 332 AmeHaŠsañ BõųtrahPas encore d'évaluation
- Chap8 - Gotechnique RoutireDocument26 pagesChap8 - Gotechnique RoutireMansourLassouedPas encore d'évaluation
- RPS 2011Document84 pagesRPS 2011nadime2015Pas encore d'évaluation
- Zemouli SamiraDocument89 pagesZemouli Samirano pain no gainPas encore d'évaluation
- MemoirDocument3 pagesMemoirSamir WehbePas encore d'évaluation
- Ba Elements Simples EC2Document114 pagesBa Elements Simples EC2Issam BrahimPas encore d'évaluation
- Sols Gonflants PDFDocument97 pagesSols Gonflants PDFAT NMPas encore d'évaluation
- Notes de Cours Hydrogeologie Automn 2014 ULAVAL PDFDocument284 pagesNotes de Cours Hydrogeologie Automn 2014 ULAVAL PDFÑàšşİm DècoùrtPas encore d'évaluation
- AFTES - Tassements Lies Au Creusement Des Ovrages en Souterrain PDFDocument28 pagesAFTES - Tassements Lies Au Creusement Des Ovrages en Souterrain PDFSérgio Bernardes100% (2)
- Modelisation Et Analyse Des Phénomènes Aéroélastiques Pour Une Pale D'ÉolienneDocument201 pagesModelisation Et Analyse Des Phénomènes Aéroélastiques Pour Une Pale D'ÉoliennePharellPas encore d'évaluation
- Diagraphie Typologie Et ApplicationsDocument35 pagesDiagraphie Typologie Et ApplicationsEbou Mo7amedPas encore d'évaluation
- Lot12 CVC04 CCTP CVCDocument60 pagesLot12 CVC04 CCTP CVCFeki MahdiPas encore d'évaluation
- Guide Etudes Techniques Portuaires PDFDocument82 pagesGuide Etudes Techniques Portuaires PDFAicha Ait TiziPas encore d'évaluation
- Comite Interafricain D'Etudes Hydrauliques (C.I.E.H) : Ouagadougou Octobre 1992Document135 pagesComite Interafricain D'Etudes Hydrauliques (C.I.E.H) : Ouagadougou Octobre 1992BRICE BANECKPas encore d'évaluation
- IntroductionDocument7 pagesIntroductionFarah FrgPas encore d'évaluation
- Geodyn AllDocument195 pagesGeodyn AllSabou SarrPas encore d'évaluation
- Fondations Et Soutennements 23-24 Lic ProDocument101 pagesFondations Et Soutennements 23-24 Lic ProHarlin EkoroPas encore d'évaluation
- Deapl 2002Document266 pagesDeapl 2002Na SamPas encore d'évaluation
- Etude de Faisabilite D'un Climatiseur Solaire Adapte A La Region de BiskraDocument97 pagesEtude de Faisabilite D'un Climatiseur Solaire Adapte A La Region de Biskramohamed belhafsiPas encore d'évaluation
- TRAVAUX DE MESURE DE LA RESISTIVITE DU SOL Et DIMENSIONNEMENT DES PRISES DE TERRE (Réparé)Document14 pagesTRAVAUX DE MESURE DE LA RESISTIVITE DU SOL Et DIMENSIONNEMENT DES PRISES DE TERRE (Réparé)plammaPas encore d'évaluation
- Ponts Routes en Maconnerie Protection Contre L Action Des Eaux Guide Technique 1992 Cle08b8d4Document49 pagesPonts Routes en Maconnerie Protection Contre L Action Des Eaux Guide Technique 1992 Cle08b8d4mouaadPas encore d'évaluation
- Ponts Routes en Maçonnerie Protection Contre Laction Des Eaux (Etc.)Document52 pagesPonts Routes en Maçonnerie Protection Contre Laction Des Eaux (Etc.)Athanase MekiePas encore d'évaluation
- 87 Dam 015 MinDocument150 pages87 Dam 015 MinMami SamPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Énergie Solaire : Guide Complet pour l'Installation de Panneaux Photovoltaïques sur Votre Maison à Pontault-CombaultD'EverandÉnergie Solaire : Guide Complet pour l'Installation de Panneaux Photovoltaïques sur Votre Maison à Pontault-CombaultPas encore d'évaluation
- Territoires et développement: La richesse du QuébecD'EverandTerritoires et développement: La richesse du QuébecPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Geot 7 00196Document12 pagesGeot 7 00196aekockautPas encore d'évaluation
- Examen Rattrapage D'ouvrages D'art Sassion 2023-2024 ARCH Et URBDocument1 pageExamen Rattrapage D'ouvrages D'art Sassion 2023-2024 ARCH Et URBaekockautPas encore d'évaluation
- Exercice N Master I CMIDocument1 pageExercice N Master I CMIaekockautPas encore d'évaluation
- Exercice N Master I CMIDocument1 pageExercice N Master I CMIaekockautPas encore d'évaluation
- 06 Technical Committee 15 tc209 17Document5 pages06 Technical Committee 15 tc209 17aekockautPas encore d'évaluation
- Examen Rattrapage D'ouvrages D'art Sassion 2023-2024 ARCH Et URBDocument1 pageExamen Rattrapage D'ouvrages D'art Sassion 2023-2024 ARCH Et URBaekockautPas encore d'évaluation
- Exercice N Master I CMIDocument1 pageExercice N Master I CMIaekockautPas encore d'évaluation
- Examen de Rattrapage L3 BTP Fondations Et MursDocument1 pageExamen de Rattrapage L3 BTP Fondations Et MursaekockautPas encore d'évaluation
- Output 2Document2 pagesOutput 2aekockautPas encore d'évaluation
- ZAIDI - LINA - Génie Civil.. - GéotechniqueDocument128 pagesZAIDI - LINA - Génie Civil.. - GéotechniqueaekockautPas encore d'évaluation
- Merged 20200625 023136.TextMarkDocument5 pagesMerged 20200625 023136.TextMarkaekockautPas encore d'évaluation
- Chapitre V ETUDE SISMIQUEDocument12 pagesChapitre V ETUDE SISMIQUEaekockautPas encore d'évaluation
- Article 1Document16 pagesArticle 1COURS RDM 2017Pas encore d'évaluation
- ch05 Etude DynamiqueDocument22 pagesch05 Etude DynamiqueaekockautPas encore d'évaluation
- 2009 CLF 21936Document171 pages2009 CLF 21936Muscadin MakensonPas encore d'évaluation
- Thème: en Vue de L'obtention Du Diplôme de Master en Génie CivilDocument178 pagesThème: en Vue de L'obtention Du Diplôme de Master en Génie CivilNarimane BoulkariaPas encore d'évaluation
- DopageDocument5 pagesDopagechimie.cantique2Pas encore d'évaluation
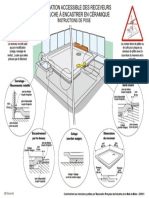
- Instructions de Pose Des Receveurs de Douche Accessibles A Encastrer en CeramiqueDocument1 pageInstructions de Pose Des Receveurs de Douche Accessibles A Encastrer en Ceramiquecloud adsophPas encore d'évaluation
- Le BalconDocument21 pagesLe Balconmoh abdouPas encore d'évaluation
- TOTEM SGMB Note de CalculDocument17 pagesTOTEM SGMB Note de CalculMohamed RjilattePas encore d'évaluation
- Construction Mince - TIPesp-c2517Document1 pageConstruction Mince - TIPesp-c2517Nirina ArimananaPas encore d'évaluation
- Fatimazohra - Dakhmouche 1963Document260 pagesFatimazohra - Dakhmouche 1963Houssem SalaanyPas encore d'évaluation
- Fiche Produit Carreau YtongDocument2 pagesFiche Produit Carreau Ytongmircea_sibana158Pas encore d'évaluation
- 02-1-1-Etude Du Coup de Bélier-2013Document55 pages02-1-1-Etude Du Coup de Bélier-2013Oliver Frere100% (2)
- Nortec 600D FR 201802 Web PDFDocument3 pagesNortec 600D FR 201802 Web PDFAminePas encore d'évaluation
- Cours - Ossature Metallique - Procedes Generaux de ConstructionDocument4 pagesCours - Ossature Metallique - Procedes Generaux de ConstructionsaidnowPas encore d'évaluation
- RDM NotationsDocument1 pageRDM Notationsbtp formationPas encore d'évaluation
- Installation de ChantierDocument4 pagesInstallation de ChantierKh MohamedPas encore d'évaluation
- Structures RoutieresDocument4 pagesStructures RoutieresLe Père Béni100% (2)
- 23-Aw-Fiche Produit-Wellea Split-Fr-0323 - V1Document4 pages23-Aw-Fiche Produit-Wellea Split-Fr-0323 - V1AMINE EL BAHIPas encore d'évaluation
- Grillage Depoutres 2017 - 2018Document46 pagesGrillage Depoutres 2017 - 2018Meslem Mazigh100% (1)
- 02 13 462 PDFDocument154 pages02 13 462 PDFFekir EL KahinaPas encore d'évaluation
- Lots Secondaires - 1Document55 pagesLots Secondaires - 1EL Housni Amine100% (2)
- Etude Stade À GradinsDocument18 pagesEtude Stade À GradinsYoussef Talbi100% (1)
- Les FusiblesDocument5 pagesLes Fusiblespyramiang2keops100% (1)
- Ep NF en 1992-4 Na 2018-12 PDFDocument12 pagesEp NF en 1992-4 Na 2018-12 PDFAlcino AzevedoPas encore d'évaluation
- Vedafrance - Certification CSTB - Cordon Coupe-FeuDocument15 pagesVedafrance - Certification CSTB - Cordon Coupe-Feurmimo1993Pas encore d'évaluation
- These 2 PDFDocument269 pagesThese 2 PDFChaima ChayouPas encore d'évaluation
- Sto TrawikDocument4 pagesSto TrawikBogdan MuresanPas encore d'évaluation
- Initiation TechniqueDocument233 pagesInitiation TechniqueEl Mehdi El Fadli100% (1)
- Ressource Materiaux CeramiquesDocument2 pagesRessource Materiaux CeramiquesghodbanePas encore d'évaluation
- Cahiers Du CSTB 3316 (2001.02) - Ossature Bois Et Isolation Thermique Des BardagesDocument48 pagesCahiers Du CSTB 3316 (2001.02) - Ossature Bois Et Isolation Thermique Des BardagesMohamed Seghir BenzemranePas encore d'évaluation
- TP Essai de DuretéDocument13 pagesTP Essai de DuretéRihab HammamiPas encore d'évaluation
- These Benoit Revil-BaudardDocument247 pagesThese Benoit Revil-Baudardnesrine10Pas encore d'évaluation
- Calcul Des Structures Metalliques de Longue PortéeDocument204 pagesCalcul Des Structures Metalliques de Longue PortéeGilles NtsanaPas encore d'évaluation