Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- TP AutomatismeDocument25 pagesTP AutomatismeOUTMANE FERNOUCHPas encore d'évaluation
- Correction TD1-EXERCICE1Document5 pagesCorrection TD1-EXERCICE1Younesse El100% (1)
- Td1+solution PDFDocument10 pagesTd1+solution PDFIslam BenanibaPas encore d'évaluation
- Correction TD Electronique NumériqueDocument65 pagesCorrection TD Electronique NumériqueOussama Eljaafari100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Reseau D'antenne Part 1 AnalyseDocument13 pagesReseau D'antenne Part 1 AnalyseMarouane Bendi AbdellahPas encore d'évaluation
- Ds Filtre de Hartley 19 Nov 18 PDFDocument4 pagesDs Filtre de Hartley 19 Nov 18 PDFYassir Sadiq Elfilali80% (5)
- 1-Les MouvementsDocument7 pages1-Les Mouvementsapi-446600404Pas encore d'évaluation
- TD 31 Corrigé - Simplification Et Recomposition D'une Fonction Logique PDFDocument4 pagesTD 31 Corrigé - Simplification Et Recomposition D'une Fonction Logique PDFJed Mansouri100% (2)
- Algébre de Boole Exrecice CorrigéDocument10 pagesAlgébre de Boole Exrecice CorrigéAhmat Sale100% (1)
- Final Ele1300 h2008Document11 pagesFinal Ele1300 h2008Youssef YoussefPas encore d'évaluation
- 4 Logique Sequentielle PDFDocument24 pages4 Logique Sequentielle PDFkhocinePas encore d'évaluation
- Correction Control Math Appliquee PDFDocument4 pagesCorrection Control Math Appliquee PDFEl Amrani LailaPas encore d'évaluation
- Electronique - Examen 2022 - 2023 - Rattrapage - CorrectionDocument5 pagesElectronique - Examen 2022 - 2023 - Rattrapage - Correctionghouileya767Pas encore d'évaluation
- Enst Gim Eln Num TD1 2021-1Document6 pagesEnst Gim Eln Num TD1 2021-1bakugo katsukiPas encore d'évaluation
- TP4 - Les Mux Et Les DemuxDocument7 pagesTP4 - Les Mux Et Les DemuxAloui Bechir0% (1)
- TD Architecture Des Ordinateurs-2021-2022Document6 pagesTD Architecture Des Ordinateurs-2021-2022FabricePas encore d'évaluation
- Chapitre 1Document12 pagesChapitre 1abdou adelPas encore d'évaluation
- Poly - en - Fak - Lab - Exercice FinalDocument32 pagesPoly - en - Fak - Lab - Exercice FinalOussama EljaafariPas encore d'évaluation
- Cours Electronique Numerique-3Document141 pagesCours Electronique Numerique-3ibouPas encore d'évaluation
- INF1500 H10 Cours 2Document38 pagesINF1500 H10 Cours 2Jason RiverPas encore d'évaluation
- Sujet Logique 1 AINFOELEC2023 CorrectionDocument7 pagesSujet Logique 1 AINFOELEC2023 Correctionfadmus64Pas encore d'évaluation
- Corrige td1 en P514 P523 Fste ElhanaouiDocument7 pagesCorrige td1 en P514 P523 Fste ElhanaouiSanae ZwinaPas encore d'évaluation
- Circuits Intégrés Combinatoires 2022-2023Document48 pagesCircuits Intégrés Combinatoires 2022-2023Lassaad AKROUTPas encore d'évaluation
- 2 ElectroNrSerie-SolutionDocument11 pages2 ElectroNrSerie-SolutioneyimambouPas encore d'évaluation
- TDI Passage Synthese 2014 V2 CorrectionDocument13 pagesTDI Passage Synthese 2014 V2 CorrectionFa KhirPas encore d'évaluation
- Corrige Cc1 D Automatisme 2011 2012Document4 pagesCorrige Cc1 D Automatisme 2011 2012sowPas encore d'évaluation
- Fiche de TD 2Document4 pagesFiche de TD 2cedricPas encore d'évaluation
- Chap1 Numération CodageDocument11 pagesChap1 Numération CodageMOHAMED AIT HADDOUCHPas encore d'évaluation
- Travaux Pratiques N°1: Objectifs de La ManipulationDocument7 pagesTravaux Pratiques N°1: Objectifs de La ManipulationElie PragPas encore d'évaluation
- Systemes de Numeration Et CodageDocument3 pagesSystemes de Numeration Et CodageBader BelhamoumiaPas encore d'évaluation
- Informatique Cours 03Document8 pagesInformatique Cours 03Kim OutchenPas encore d'évaluation
- TD Circuit Numerique 1 - 240104 - 085119Document9 pagesTD Circuit Numerique 1 - 240104 - 085119ulrichloic98Pas encore d'évaluation
- TD Sur Evaluation en InformatiqueDocument3 pagesTD Sur Evaluation en InformatiqueAdama Abdul Kader KAMBIREPas encore d'évaluation
- Automatisme ModifiéDocument14 pagesAutomatisme ModifiéDayang DayangPas encore d'évaluation
- 03 Chapitre1-Introduction À LinformatiqueDocument8 pages03 Chapitre1-Introduction À LinformatiqueMøhámèd RěmîtåPas encore d'évaluation
- AutomatismeDocument12 pagesAutomatismeDayang DayangPas encore d'évaluation
- BooleDocument6 pagesBooleredPas encore d'évaluation
- Fonctions LogiquesDocument2 pagesFonctions LogiquesTasnim MehrabiPas encore d'évaluation
- Matière: Systèmes Logiques TD2: F (A+B D) - (A +C) D 0Document2 pagesMatière: Systèmes Logiques TD2: F (A+B D) - (A +C) D 0Khaoula YakoubiPas encore d'évaluation
- TDI Passage Synthese 2014 V1 CorrectionDocument13 pagesTDI Passage Synthese 2014 V1 CorrectionAbderrahim TANANPas encore d'évaluation
- TP de Cours de MicroprocesseurDocument3 pagesTP de Cours de MicroprocesseurIr Bruno MabikaPas encore d'évaluation
- TP3 Mux Et Demux 2023Document3 pagesTP3 Mux Et Demux 2023Bassmala BaraaPas encore d'évaluation
- Chapitre 1Document18 pagesChapitre 1Hammemi MariemPas encore d'évaluation
- Correction TD3-EXERCICE1Document5 pagesCorrection TD3-EXERCICE1Younesse ElPas encore d'évaluation
- TP 02 Informatique 1Document3 pagesTP 02 Informatique 1Khenoufa Mohamed LaminePas encore d'évaluation
- Chap1 Numération Codage-2022Document12 pagesChap1 Numération Codage-2022a.aitlmahfoud1492Pas encore d'évaluation
- Solution Aut04Document9 pagesSolution Aut04mahdiPas encore d'évaluation
- Devoir-Circuit-Logique Final 2015 CorigéDocument4 pagesDevoir-Circuit-Logique Final 2015 CorigéabderrahmenPas encore d'évaluation
- Upload - Série D'exercices N°2-3tech-Systèmes Combinatoires-2013-2014 PDFDocument6 pagesUpload - Série D'exercices N°2-3tech-Systèmes Combinatoires-2013-2014 PDFyassine zitouniPas encore d'évaluation
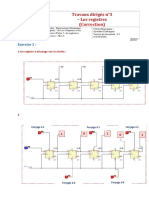
- Correction TD3 Les RegistresDocument5 pagesCorrection TD3 Les RegistresHend ChaouchPas encore d'évaluation
- Correction-Controle - LAT42-2021Document3 pagesCorrection-Controle - LAT42-2021Abdou HarchePas encore d'évaluation
- CHAP3 - La Représentation de L'informationDocument14 pagesCHAP3 - La Représentation de L'informationdjidel2023Pas encore d'évaluation
- Electr NumerDocument60 pagesElectr Numeryoannaffantodji750Pas encore d'évaluation
- Cour Aii Tb21Document6 pagesCour Aii Tb21Ochi ChaimaPas encore d'évaluation
- Exercices Sur Lalg+¿bre de BooleDocument6 pagesExercices Sur Lalg+¿bre de BooleAmine OsmaniPas encore d'évaluation
- Archi ExamDocument3 pagesArchi Exammohanned.abbasPas encore d'évaluation
- TD2 Combinatoire PT 2019-2020Document7 pagesTD2 Combinatoire PT 2019-2020Maha Bouattour100% (1)
- Rapport VHDL Rémi ADDEDocument19 pagesRapport VHDL Rémi ADDEsorejadPas encore d'évaluation
- Chapitre 4 Les Conversions de BaseDocument9 pagesChapitre 4 Les Conversions de BaseFerdyvesPas encore d'évaluation
- TD Num 2012 2013Document18 pagesTD Num 2012 2013idrissa dembelePas encore d'évaluation
- Automatisme BTMEM 201802Document14 pagesAutomatisme BTMEM 201802Francis TCHIESSEUPas encore d'évaluation
- Automatisme Prob BT Ih 2012 OkDocument18 pagesAutomatisme Prob BT Ih 2012 OkFrancis TCHIESSEUPas encore d'évaluation
- Automatisme PDFDocument16 pagesAutomatisme PDFFrancis TCHIESSEUPas encore d'évaluation
- Automatisme Prob BT Ih 2011 Ok+Document19 pagesAutomatisme Prob BT Ih 2011 Ok+Francis TCHIESSEUPas encore d'évaluation
- Type D'argumentsDocument10 pagesType D'argumentsCharaf Adam LaasselPas encore d'évaluation
- CHP 2Document50 pagesCHP 2azertyPas encore d'évaluation
- TD1 2021 CorrectionDocument3 pagesTD1 2021 CorrectionAnas100% (1)
- L'amortissement Du Matériel IndustrielDocument38 pagesL'amortissement Du Matériel Industrielbachir boukhalfaPas encore d'évaluation
- TD Mécanique Première PartieDocument4 pagesTD Mécanique Première Partieemmanuelmayala40Pas encore d'évaluation
- Exercices D'application Bascules Et Compteurs - SemicorrigéDocument8 pagesExercices D'application Bascules Et Compteurs - SemicorrigéASSIA SAOUDIPas encore d'évaluation
- Cours CompletDocument122 pagesCours CompletPFEPas encore d'évaluation
- TD MQ SMP s5 Chap2 2014-15 NajibDocument2 pagesTD MQ SMP s5 Chap2 2014-15 Najibnajib spectroPas encore d'évaluation
- Chapitre - 2 CMNDocument71 pagesChapitre - 2 CMNZakariae ZâamounPas encore d'évaluation
- Notions de Systemes Asservis PDFDocument80 pagesNotions de Systemes Asservis PDFSiéJustinDembelePas encore d'évaluation
- CHP 1-5 - DiaposDocument96 pagesCHP 1-5 - DiaposFabien LucienPas encore d'évaluation
- Enis DC1 Dme 13 14Document3 pagesEnis DC1 Dme 13 14molk kallelPas encore d'évaluation
- Correction TD1 Analyse1 MIPC 21 22Document12 pagesCorrection TD1 Analyse1 MIPC 21 22Hajar AMENAOUPas encore d'évaluation
- Activité P5 de Synthèse-PrévisionsDocument1 pageActivité P5 de Synthèse-PrévisionsOumaima Ben SaidPas encore d'évaluation
- Mini Session PC 2022 02 02Document2 pagesMini Session PC 2022 02 02Youri NoghoPas encore d'évaluation
- Exercices Maths TC International 6 1Document4 pagesExercices Maths TC International 6 1tamba vieux tolnoPas encore d'évaluation
- CFM2007 1329Document6 pagesCFM2007 1329Saifeddine Ben SalemPas encore d'évaluation
- Guide Des UV 2013-14Document213 pagesGuide Des UV 2013-14Akram Ben KhemisPas encore d'évaluation
- TheseDocument188 pagesTheseBilel LetaiefPas encore d'évaluation
- Etude de Systèmes ÉchantillonnéesDocument9 pagesEtude de Systèmes Échantillonnéessouaf.hedilPas encore d'évaluation
- Sous-Épreuve E41 - BTS Bâtiment - Juin 2015 - Nouvelle Calédonie CorrigéDocument6 pagesSous-Épreuve E41 - BTS Bâtiment - Juin 2015 - Nouvelle Calédonie CorrigéMurat BasPas encore d'évaluation
- Chap2-Types, Opérateurs Et ExpressionsDocument71 pagesChap2-Types, Opérateurs Et Expressionsm.azeroualPas encore d'évaluation
- TD ConiqueDocument5 pagesTD ConiqueBertino DidahPas encore d'évaluation
- Cpa 1Document2 pagesCpa 1Kenneth KodjoPas encore d'évaluation
- 1-Cahier Cycle4 5e PDFDocument128 pages1-Cahier Cycle4 5e PDFkeybrrPas encore d'évaluation