Vous aimerez peut-être aussi
- Cours MATHEMATIQUE 4eme COMPLETDocument134 pagesCours MATHEMATIQUE 4eme COMPLETRasolondraibe Jean Marie100% (2)
- Britannicus de Jean RACINEDocument6 pagesBritannicus de Jean RACINEsiyeon9242100% (1)
- Ces Petits Riens Qui Changent ToutDocument240 pagesCes Petits Riens Qui Changent ToutAlex AnderPas encore d'évaluation
- Sociologie Du Sport Duret Pascal 1Document223 pagesSociologie Du Sport Duret Pascal 1Jihed HajSalem100% (1)
- Silence Must Be! Thierry de MeyDocument15 pagesSilence Must Be! Thierry de MeyGioele BalestriniPas encore d'évaluation
- Gestion D EntrepriseDocument39 pagesGestion D EntrepriseKeep On DreamingPas encore d'évaluation
- Cours Catia v5Document28 pagesCours Catia v5Ahmed Ben YahiaPas encore d'évaluation
- Les Points Clés de L'article: Fiche Récap. #13Document4 pagesLes Points Clés de L'article: Fiche Récap. #13Orcel GenesysPas encore d'évaluation
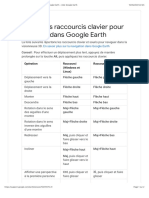
- Utiliser Les Raccourcis Clavier Pour Naviguer Dans Google Earth - Aide Google EarthDocument2 pagesUtiliser Les Raccourcis Clavier Pour Naviguer Dans Google Earth - Aide Google EarthAdrien MartinPas encore d'évaluation
- Comportement Face Aux Erreurs CoursDocument26 pagesComportement Face Aux Erreurs CoursYouness FahmiPas encore d'évaluation
- LES LIMITES ExposéDocument16 pagesLES LIMITES ExposéSimone SimonetPas encore d'évaluation
- MODULE N°1 - Outils Statistiques SESDocument6 pagesMODULE N°1 - Outils Statistiques SESWiztifa KonatePas encore d'évaluation
- Cours1 - Analyse de DonnéesDocument10 pagesCours1 - Analyse de DonnéesabelPas encore d'évaluation
- Raccourcis ILLUSTRATOR CS3Document15 pagesRaccourcis ILLUSTRATOR CS3kab mohammePas encore d'évaluation
- MDL611Document3 pagesMDL611ScribdTranslationsPas encore d'évaluation
- Cours 1 Statistiques VRPDocument69 pagesCours 1 Statistiques VRPDylan XiaPas encore d'évaluation
- LIFAP6Sem1 19 20 Cours08Document4 pagesLIFAP6Sem1 19 20 Cours08CbhPas encore d'évaluation
- Meth - 10 SuitesDocument2 pagesMeth - 10 SuitesToneca GravixyPas encore d'évaluation
- III - Les Condition SiDocument6 pagesIII - Les Condition SiSouhaib AhmedPas encore d'évaluation
- La Valeur AbsolueDocument20 pagesLa Valeur AbsoluecoiffaPas encore d'évaluation
- 19 Information Chiffree MDocument6 pages19 Information Chiffree MDylan KenmognePas encore d'évaluation
- DOE02.en.frDocument5 pagesDOE02.en.frchaib boudabPas encore d'évaluation
- 19 Information Chiffree MDocument7 pages19 Information Chiffree MJose Gabriel MiñoPas encore d'évaluation
- Syntaxe Algo C MatlabDocument2 pagesSyntaxe Algo C Matlabibtihal RNPas encore d'évaluation
- Les Lecons de Geometrie1 PDFDocument14 pagesLes Lecons de Geometrie1 PDFBELFERROUM LYESPas encore d'évaluation
- 1 - Retracements de FibonacciDocument5 pages1 - Retracements de FibonacciBilal BouchenoufPas encore d'évaluation
- Calculs StatistiquesDocument27 pagesCalculs StatistiquesMme et Mr Lafon100% (1)
- Chap1.Analyse Unidimensionnelle 2022Document59 pagesChap1.Analyse Unidimensionnelle 2022Ahmed ChiboubPas encore d'évaluation
- CH 9 - Droite de RégressionDocument11 pagesCH 9 - Droite de Régressionboudour.zitounPas encore d'évaluation
- chapitreIV ACP-1Document41 pageschapitreIV ACP-1Asma SatouriPas encore d'évaluation
- Meilleure Stratégie XXXXDocument15 pagesMeilleure Stratégie XXXXBenoît VONSAPas encore d'évaluation
- Sondage B3TSI - #Revoirsonmedecin - Grand EstDocument37 pagesSondage B3TSI - #Revoirsonmedecin - Grand EstFrance3AlsacePas encore d'évaluation
- Poly Exercices PDFDocument36 pagesPoly Exercices PDFJulie EmoliePas encore d'évaluation
- Méthode TPDocument2 pagesMéthode TPMarwa.berberPas encore d'évaluation
- Rapport - Complet - Officiel - Exemple (1) 14Document1 pageRapport - Complet - Officiel - Exemple (1) 14ChamgnyPas encore d'évaluation
- Serpent FR Christophe BoudiasDocument3 pagesSerpent FR Christophe BoudiasDiego OrtizPas encore d'évaluation
- Cours 3 - S - Quences Contr - LeDocument26 pagesCours 3 - S - Quences Contr - Leϟ KaiZyX ϟPas encore d'évaluation
- TD 07Document3 pagesTD 07alaskaPas encore d'évaluation
- Notion de LimitesDocument7 pagesNotion de LimitesSimone SimonetPas encore d'évaluation
- 3281emeautomne CompressedDocument29 pages3281emeautomne Compressedmayne.coraliePas encore d'évaluation
- Formes Indéterminées +appDocument1 pageFormes Indéterminées +appk92n8rmkfwPas encore d'évaluation
- Partie 3-CoursDocument6 pagesPartie 3-CoursLeila BaPas encore d'évaluation
- 1bex 03 Suites Cr1Fr AmmariDocument1 page1bex 03 Suites Cr1Fr AmmariMahfoud NatsuPas encore d'évaluation
- Tuto-Catia V5-Pot de ConfitureDocument32 pagesTuto-Catia V5-Pot de Confiturekelk'1Pas encore d'évaluation
- Actu 09 17 Tous Notes AV RemovedDocument2 pagesActu 09 17 Tous Notes AV RemovedJordan JoelPas encore d'évaluation
- Exe Rev Algo Chap 2Document13 pagesExe Rev Algo Chap 2Hunt MarkPas encore d'évaluation
- J'Apprends À Programmer - Les Variables - Apprendre La ProgrammationDocument1 pageJ'Apprends À Programmer - Les Variables - Apprendre La ProgrammationKhadidja BoukaboubPas encore d'évaluation
- ≡ ? تقييمات في التربية الإسلامية - السنة الثانية…Document1 page≡ ? تقييمات في التربية الإسلامية - السنة الثانية…tubekoussay6Pas encore d'évaluation
- Souhait Et EspoirDocument11 pagesSouhait Et EspoirLaura CamachoPas encore d'évaluation
- Is LMDocument15 pagesIs LMNajwa KaramPas encore d'évaluation
- IE Evolution TableauDocument2 pagesIE Evolution TableauBrahim ImzilPas encore d'évaluation
- SVM SVMVS 023Document6 pagesSVM SVMVS 023Kitz SanozierPas encore d'évaluation
- Questionnaire FiscaliteDocument4 pagesQuestionnaire FiscaliteMaria GhouatPas encore d'évaluation
- Le Grafcet Doc RessDocument9 pagesLe Grafcet Doc RessBrs AminePas encore d'évaluation
- Changer de Carrière - Comment Réussir Sa Transition Professionnelle en DouceurDocument6 pagesChanger de Carrière - Comment Réussir Sa Transition Professionnelle en DouceurMustapha MezgranePas encore d'évaluation
- Evaluation Des Modèles de MLDocument32 pagesEvaluation Des Modèles de MLNora HabrichPas encore d'évaluation
- Implémentation D'un Contrôleur de La Température À L'interieureDocument17 pagesImplémentation D'un Contrôleur de La Température À L'interieureayman.ouhajjiPas encore d'évaluation
- Séances Du 14Document5 pagesSéances Du 14tiana tahinaPas encore d'évaluation
- A2. DérivabilitéDocument7 pagesA2. DérivabilitéSamou_haaPas encore d'évaluation
- 2nd - 1. Information Chiffrée - CoursDocument4 pages2nd - 1. Information Chiffrée - Coursmax.levyPas encore d'évaluation
- Document 6Document2 pagesDocument 6Adam TAKAPas encore d'évaluation
- Book8Document2 pagesBook8ElnBEKKARYPas encore d'évaluation
- DEV1Document1 pageDEV1ElnBEKKARYPas encore d'évaluation
- cc_mef_2020Document2 pagescc_mef_2020ElnBEKKARYPas encore d'évaluation
- Analyse: NumériqueDocument14 pagesAnalyse: NumériqueElnBEKKARYPas encore d'évaluation
- Mini Projet AuditDocument8 pagesMini Projet AuditElnBEKKARYPas encore d'évaluation
- ch5 FSTS DISTRIBUTEURS INITDocument56 pagesch5 FSTS DISTRIBUTEURS INITElnBEKKARYPas encore d'évaluation
- Rattrapage III 2014Document1 pageRattrapage III 2014ElnBEKKARYPas encore d'évaluation
- Brainst PDFDocument31 pagesBrainst PDFElnBEKKARYPas encore d'évaluation
- Rapport Final ELMAHNASSI Safae (2021)Document66 pagesRapport Final ELMAHNASSI Safae (2021)ElnBEKKARYPas encore d'évaluation
- Presentation FiabilitéDocument3 pagesPresentation FiabilitéElnBEKKARYPas encore d'évaluation
- Limiteur de PressionDocument7 pagesLimiteur de PressionElnBEKKARYPas encore d'évaluation
- AMDECDocument20 pagesAMDECElnBEKKARYPas encore d'évaluation
- TPFODocument4 pagesTPFOElnBEKKARYPas encore d'évaluation
- Diagramme de ParetoDocument21 pagesDiagramme de ParetoElnBEKKARYPas encore d'évaluation
- TD Eci Master Meca2Document4 pagesTD Eci Master Meca2ElnBEKKARYPas encore d'évaluation
- 6 Outils de BrochageDocument2 pages6 Outils de BrochageElnBEKKARYPas encore d'évaluation
- Solution de Série 2 Cpateur À F.ODocument2 pagesSolution de Série 2 Cpateur À F.OElnBEKKARYPas encore d'évaluation
- Systèmes Mécatroniques Chapitre 3Document32 pagesSystèmes Mécatroniques Chapitre 3ElnBEKKARYPas encore d'évaluation
- Contrôle Systèmes Mécatroniques Février 2023Document2 pagesContrôle Systèmes Mécatroniques Février 2023ElnBEKKARYPas encore d'évaluation
- Fibre Optique Série 1Document1 pageFibre Optique Série 1ElnBEKKARYPas encore d'évaluation
- Systèmes Mécatroniques Chapitre 3 - 2022-2023Document43 pagesSystèmes Mécatroniques Chapitre 3 - 2022-2023ElnBEKKARYPas encore d'évaluation
- Renforcement de La Sécurité Alimentaire en Afrique Centrale À Travers La Gestion Durable Des Produits Forestiers Non Ligneux (GCP/RAF/441/GER)Document2 pagesRenforcement de La Sécurité Alimentaire en Afrique Centrale À Travers La Gestion Durable Des Produits Forestiers Non Ligneux (GCP/RAF/441/GER)blaise kabeyaPas encore d'évaluation
- Développement D'une Applicatio - Chaimae EL GADDAR - 3989Document74 pagesDéveloppement D'une Applicatio - Chaimae EL GADDAR - 3989Mouad SaadPas encore d'évaluation
- GOPM MGP Version Du 23-04-04Document36 pagesGOPM MGP Version Du 23-04-04Bouallegue Mounir0% (1)
- EtudeTechnique Souterraine Projet Électrique PDFDocument32 pagesEtudeTechnique Souterraine Projet Électrique PDFsaid3232Pas encore d'évaluation
- Exercices de ThermodynamiqueDocument18 pagesExercices de ThermodynamiqueBadre-ezzamen KaddourPas encore d'évaluation
- C6 Chap05 - MolliexDocument19 pagesC6 Chap05 - MolliexboblenazePas encore d'évaluation
- Amendement Loi 13-09Document4 pagesAmendement Loi 13-09nas el ghiouanPas encore d'évaluation
- Pic 16 F 84Document47 pagesPic 16 F 84Salah DahouathiPas encore d'évaluation
- Candidaturemaster Fsjes Uca Ma IojDocument2 pagesCandidaturemaster Fsjes Uca Ma IojBERPas encore d'évaluation
- Lagarce Absurde Épique DistanciationDocument5 pagesLagarce Absurde Épique DistanciationLudovica PasiPas encore d'évaluation
- Justificatif D'Abonnement: #ATT3060295282Document1 pageJustificatif D'Abonnement: #ATT3060295282Lydia OUALIDPas encore d'évaluation
- ArabeDocument7 pagesAraberanya.shaamsPas encore d'évaluation
- Cas Meuble ÉcoDocument3 pagesCas Meuble Écoabdou100% (1)
- Cours D'optique Géométrique SVT - PC EnsDocument83 pagesCours D'optique Géométrique SVT - PC EnsIssouf DiabyPas encore d'évaluation
- Opérateur de Laboratoire en Mécanique Des Sols: Programme D'étudesDocument128 pagesOpérateur de Laboratoire en Mécanique Des Sols: Programme D'étudesOuezna BahloulPas encore d'évaluation
- Comique BurlesqueDocument5 pagesComique BurlesqueABDOUPas encore d'évaluation
- Calcul LitteralDocument3 pagesCalcul Litteralvangog777Pas encore d'évaluation
- Chap3 Circuit Triphasés-1Document15 pagesChap3 Circuit Triphasés-1azezaePas encore d'évaluation
- RC Exploitant en Informatique FINALDocument24 pagesRC Exploitant en Informatique FINALhocine fali100% (1)
- Bekhadda Salima 2ddocposDocument2 pagesBekhadda Salima 2ddocposLina AddaPas encore d'évaluation
- Product Technical SheetDocument3 pagesProduct Technical SheetRyanRwPas encore d'évaluation
- Le Risque La Norme ISO/IEC Guide 73 Définit Le Risque Comme: Je Peu Dire QueDocument5 pagesLe Risque La Norme ISO/IEC Guide 73 Définit Le Risque Comme: Je Peu Dire QueFerhat LadjeroudPas encore d'évaluation
- Trace Metal Analysis in Petroleum Products SampleDocument10 pagesTrace Metal Analysis in Petroleum Products SampleEssam Eldin Metwally AhmedPas encore d'évaluation
- FICHE Nombre Et Calcul Au PrimaireDocument2 pagesFICHE Nombre Et Calcul Au PrimaireNoémie De PauwPas encore d'évaluation
- RPRT List Pers Etab 20231015Document1 pageRPRT List Pers Etab 20231015benlaikomar2023Pas encore d'évaluation