Vous aimerez peut-être aussi
- Gestion Des Véhicules Et Du Parc AutomobileDocument59 pagesGestion Des Véhicules Et Du Parc AutomobileWoïla FantasiaPas encore d'évaluation
- Etude Du Reseau Radio Cellulai - BOUTAIB Zakaria - 2915Document91 pagesEtude Du Reseau Radio Cellulai - BOUTAIB Zakaria - 2915Sanae Berraho100% (1)
- Giselec FRDocument2 pagesGiselec FRTaj NioukyPas encore d'évaluation
- Msap DiapoDocument41 pagesMsap Diapoabd elhamid mabrouk0% (2)
- Couples de Serrage C-MaxDocument3 pagesCouples de Serrage C-Maxal1dup0% (1)
- MASE531 Réseaux de Communication Pour Systèmes EmbarquésDocument104 pagesMASE531 Réseaux de Communication Pour Systèmes EmbarquésDahPas encore d'évaluation
- EST Kénitra - S3 - Médium CodageDocument27 pagesEST Kénitra - S3 - Médium CodageIsmail Elouarga100% (1)
- C CdRobotDocument52 pagesC CdRobotrjlassi136Pas encore d'évaluation
- Le Bus CanDocument32 pagesLe Bus CanDragon1700Pas encore d'évaluation
- Les Canaux Logiques Et Physiques Du GSM - Les Canaux... : Find Study ResourcesDocument9 pagesLes Canaux Logiques Et Physiques Du GSM - Les Canaux... : Find Study ResourcespauaPas encore d'évaluation
- Can BusDocument32 pagesCan BuskarimmimPas encore d'évaluation
- CV AsaadDocument2 pagesCV Asaadasaad ABABOUPas encore d'évaluation
- Inbound 5849122028402496902Document75 pagesInbound 5849122028402496902Abdelkrim KefifPas encore d'évaluation
- M124 ConnectivitéDocument5 pagesM124 ConnectivitéGhita ZazPas encore d'évaluation
- ELA 026 2018 enDocument2 pagesELA 026 2018 enmc-fatiguePas encore d'évaluation
- MP RT Bac5 PDFDocument6 pagesMP RT Bac5 PDFElva TraoréPas encore d'évaluation
- Formation HT FAD Formation InitialeDocument1 pageFormation HT FAD Formation InitialeADOUN Léotard100% (1)
- Catalogue CAMELIA+Juin+2017Document12 pagesCatalogue CAMELIA+Juin+2017SergePas encore d'évaluation
- Annuaire Entreprises MarocainDocument8 pagesAnnuaire Entreprises MarocainHanane AbakouyPas encore d'évaluation
- Iristi 3Document1 pageIristi 3AbouZakariaPas encore d'évaluation
- Fiche Presentation Igit 01 04 2021Document9 pagesFiche Presentation Igit 01 04 2021sokhna.mbaye3Pas encore d'évaluation
- Cours DSP1Document25 pagesCours DSP1Mahdi LahdiliPas encore d'évaluation
- Reussir Sa Transition Numerique en TNT Module 5 Transport Par Satellite Faisceaux Hertziens Et Fibre OptiqueDocument1 pageReussir Sa Transition Numerique en TNT Module 5 Transport Par Satellite Faisceaux Hertziens Et Fibre OptiqueKoffi ÉMILE KOUAKOUPas encore d'évaluation
- Basma Skouri: Compétences Techniques Expériences ProfessionnellesDocument1 pageBasma Skouri: Compétences Techniques Expériences ProfessionnellesSaid SkouryPas encore d'évaluation
- 0 PDFDocument1 page0 PDFabdelaadim laoudiPas encore d'évaluation
- CV Tefiani Yassine FRDocument2 pagesCV Tefiani Yassine FRYassine TefianiPas encore d'évaluation
- J3ea2003014 PDFDocument12 pagesJ3ea2003014 PDFFêt ĤīīPas encore d'évaluation
- RATTRAPAGEDocument2 pagesRATTRAPAGEstanis kamdoumPas encore d'évaluation
- Conception Et Realisation D'Un Outil D'Aide Au Dimensionnement D'Un Reseau D'Acces Large Bande NGN (Ip/Msan), Cas de CamtelDocument74 pagesConception Et Realisation D'Un Outil D'Aide Au Dimensionnement D'Un Reseau D'Acces Large Bande NGN (Ip/Msan), Cas de CamtelOne ZerofivePas encore d'évaluation
- 0-Programme - Cours de Systemes de Radiocoms PrivésDocument4 pages0-Programme - Cours de Systemes de Radiocoms Privésdimitrironald7Pas encore d'évaluation
- CV - Mohamed SIKOUDocument1 pageCV - Mohamed SIKOUMOHAMED SIKOUPas encore d'évaluation
- Msakni Mehdi FRDocument123 pagesMsakni Mehdi FREl Arbi Abdellaoui AlaouiPas encore d'évaluation
- LST GiDocument1 pageLST GiAnas OuasmiPas encore d'évaluation
- Fiche EltDocument2 pagesFiche EltMinou LuchianoPas encore d'évaluation
- Seance I IiDocument13 pagesSeance I Iiutchihaitatchi129Pas encore d'évaluation
- VotreProjet PartieHardwareDocument12 pagesVotreProjet PartieHardwareattmaniayoub1Pas encore d'évaluation
- 14 MP-RTDocument4 pages14 MP-RTYooooPas encore d'évaluation
- CV AbdessamadDocument1 pageCV AbdessamadamoPas encore d'évaluation
- Umts Hspa 4pDocument21 pagesUmts Hspa 4pYonnel MbienePas encore d'évaluation
- Cours Multiplexage M1Document46 pagesCours Multiplexage M1sam100% (1)
- CV Tefiani Yassine FRDocument2 pagesCV Tefiani Yassine FRYassine TefianiPas encore d'évaluation
- LASTICDocument134 pagesLASTICBouzid MhamdiPas encore d'évaluation
- Simulation D'un Émetteur / Récepteur ADS-B Et Décodage Temps Réel À L'aide: de MATLAB, D'une Radio Logicielle Et D'une Antenne PatchDocument30 pagesSimulation D'un Émetteur / Récepteur ADS-B Et Décodage Temps Réel À L'aide: de MATLAB, D'une Radio Logicielle Et D'une Antenne Patchbouslimane idirPas encore d'évaluation
- Communication Industrielle - Partie 2Document16 pagesCommunication Industrielle - Partie 2Nouhaila ADBIBPas encore d'évaluation
- RES 303 Signalisation Dans Les RéseauxDocument127 pagesRES 303 Signalisation Dans Les RéseauxTariq_Elmajdou_8934Pas encore d'évaluation
- CV AbdelhakmiDocument1 pageCV Abdelhakmiabdelhakmi oussamaPas encore d'évaluation
- Rami Mostafa CVDocument1 pageRami Mostafa CVMostafa RamiPas encore d'évaluation
- UCAD Carrier Supporting Carriers Memoire 2015 IngDocument80 pagesUCAD Carrier Supporting Carriers Memoire 2015 IngBambaPas encore d'évaluation
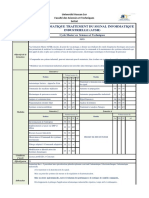
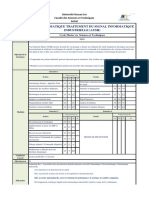
- MST ATSII Fiche TechniqueDocument4 pagesMST ATSII Fiche TechniqueAchrafPas encore d'évaluation
- MST ATSII Fiche TechniqueDocument4 pagesMST ATSII Fiche TechniqueImane FirdawsPas encore d'évaluation
- Couche Physique UMTSDocument26 pagesCouche Physique UMTSTarik BourrouhouPas encore d'évaluation
- Fiche Filiere Elt PDFDocument2 pagesFiche Filiere Elt PDFLatifa SaidanePas encore d'évaluation
- Fiche Technique Master ESSA 2014 PDFDocument1 pageFiche Technique Master ESSA 2014 PDFmohammed hammoumiPas encore d'évaluation
- Module Algo Prog 1 Chap1 MIPC - PDFDocument25 pagesModule Algo Prog 1 Chap1 MIPC - PDFjosoaramaroson1Pas encore d'évaluation
- Hamza EddahmounyDocument1 pageHamza EddahmounyOth ManePas encore d'évaluation
- Avancement2014 322PFE PDFDocument8 pagesAvancement2014 322PFE PDFAmineBentissPas encore d'évaluation
- Giselec fr0Document2 pagesGiselec fr0bricePas encore d'évaluation
- 3218 - Commutation Voix & DonneesDocument1 page3218 - Commutation Voix & DonneesGide BaniekPas encore d'évaluation
- CV (FR) Raouaa KammounDocument2 pagesCV (FR) Raouaa KammounRaouaa KammounPas encore d'évaluation
- Test TDDocument2 pagesTest TDSaid ReganiPas encore d'évaluation
- CV RihembkDocument1 pageCV Rihembkrihem boukediPas encore d'évaluation
- Livret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62D'EverandLivret 2 - Dossier validation VAE - Responsable de travaux Réseaux télécoms Très Haut Débit: 2023, #62Pas encore d'évaluation
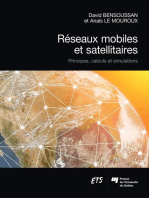
- Réseaux mobiles et satellitaires: Principes, calculs et simulationsD'EverandRéseaux mobiles et satellitaires: Principes, calculs et simulationsPas encore d'évaluation
- Cours MASS543Document40 pagesCours MASS543DahPas encore d'évaluation
- Correction TDDocument2 pagesCorrection TDDahPas encore d'évaluation
- Chap IDocument36 pagesChap IDahPas encore d'évaluation
- TDDocument4 pagesTDDahPas encore d'évaluation
- Chapitre 0Document22 pagesChapitre 0DahPas encore d'évaluation
- DS204022Document5 pagesDS204022DahPas encore d'évaluation
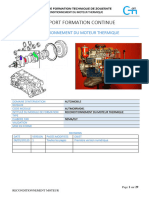
- Reconditionnement MoteurDocument29 pagesReconditionnement MoteurDahPas encore d'évaluation
- Cours MAAM541Document35 pagesCours MAAM541DahPas encore d'évaluation
- DS Mass543Document5 pagesDS Mass543DahPas encore d'évaluation
- GMAODocument5 pagesGMAODahPas encore d'évaluation
- CPI1 CONST TD Exercices EngrenagesDocument4 pagesCPI1 CONST TD Exercices Engrenagesyassine lakhalPas encore d'évaluation
- PARTIE 2-Exigence Du Maitre d'Ouvrage-H PDFDocument60 pagesPARTIE 2-Exigence Du Maitre d'Ouvrage-H PDFYoussef JakePas encore d'évaluation
- AppliClim PDFDocument22 pagesAppliClim PDFSarah BelhadjPas encore d'évaluation
- Pompe Flygt DP 3068.180 HT 214Document20 pagesPompe Flygt DP 3068.180 HT 214redouane.labbaciPas encore d'évaluation
- Grue Mobile.Document16 pagesGrue Mobile.anisanis100% (2)
- Cours BatterieDocument35 pagesCours BatterieKirito KunPas encore d'évaluation
- Exemple PO VélosDocument4 pagesExemple PO VélosBouchra OmarPas encore d'évaluation
- Voucher-CHEZ MAMAN MOMO-4h-vc-788-08.30.23Document10 pagesVoucher-CHEZ MAMAN MOMO-4h-vc-788-08.30.23andre legranPas encore d'évaluation
- SWINCAR E-Spider 2019 03 14 Fiche Technique FRDocument1 pageSWINCAR E-Spider 2019 03 14 Fiche Technique FRNicolasMaillotGrondinPas encore d'évaluation
- Freinage Des MoteursDocument4 pagesFreinage Des MoteursOthmanPas encore d'évaluation
- ADAS+Hybrid VoitureDocument9 pagesADAS+Hybrid VoitureYOUSSEF EL MERABETPas encore d'évaluation
- Le Rapport Du Systéme Électrique Du DistributeurDocument4 pagesLe Rapport Du Systéme Électrique Du DistributeurAMINE OUKESSOUPas encore d'évaluation
- Renault TangerDocument25 pagesRenault TangerELHACHMI OUMAIMAPas encore d'évaluation
- Synthèse Suivi Des Opérations de Maintenance Semainedu 24 Au 30-07-2020Document76 pagesSynthèse Suivi Des Opérations de Maintenance Semainedu 24 Au 30-07-2020Junior BamouPas encore d'évaluation
- NEOBUSDocument3 pagesNEOBUSEricPas encore d'évaluation
- Brochage AveoDocument3 pagesBrochage AveoScribdTranslationsPas encore d'évaluation
- Groupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéDocument8 pagesGroupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéHassan ElkhabriPas encore d'évaluation
- Cours Hydraulique 81 Debit Pression VerinDocument3 pagesCours Hydraulique 81 Debit Pression VerinNestor Chiantse100% (1)
- 17 Embrayage JF Prof CopieDocument16 pages17 Embrayage JF Prof CopieClément GuérinPas encore d'évaluation
- Chapitre IV. INTERFACES MECANIQUESDocument32 pagesChapitre IV. INTERFACES MECANIQUESprincekasongopk9292Pas encore d'évaluation
- Rapport PFE Soukaina El AzzaouiDocument130 pagesRapport PFE Soukaina El AzzaouiMoukrim SafaePas encore d'évaluation
- Courant Triphasé - Wikipédia PDFDocument9 pagesCourant Triphasé - Wikipédia PDFbeta2009100% (1)
- RemontageDocument2 pagesRemontagedudulePas encore d'évaluation
- Quizz Compo Moteur 2mv2Document14 pagesQuizz Compo Moteur 2mv2gttpassionPas encore d'évaluation
- 2016 BMW R 1200 Gs Adventure 65357Document224 pages2016 BMW R 1200 Gs Adventure 65357rsdPas encore d'évaluation
- Cours VRD FgiDocument93 pagesCours VRD FgiMobassir AboubakarPas encore d'évaluation
- E32 Mécanique. Document ÉlèveDocument7 pagesE32 Mécanique. Document Élèveyouri59490Pas encore d'évaluation