Vous aimerez peut-être aussi
- Cours PlasticitDocument33 pagesCours PlasticitEnp JgcPas encore d'évaluation
- Cours PlasticitéDocument33 pagesCours PlasticitéCIAG OmarPas encore d'évaluation
- NL 2Document110 pagesNL 2Tsara Sôma ArkeniohPas encore d'évaluation
- Chapitre 02 Introduction Aux Calculs Non Linaires en Simulation Numériques Version ElearningDocument64 pagesChapitre 02 Introduction Aux Calculs Non Linaires en Simulation Numériques Version ElearningTom BriderPas encore d'évaluation
- Résistance Des Matériaux: Dimensionnement Des Bois Travaillant en FlexionDocument20 pagesRésistance Des Matériaux: Dimensionnement Des Bois Travaillant en Flexionq.morice03Pas encore d'évaluation
- Toutes Les Fonctionnalités ANSYS 17.0 1Document2 pagesToutes Les Fonctionnalités ANSYS 17.0 1DaoudPas encore d'évaluation
- 3 - Lois de Comportement 1A - SDMGMPDocument5 pages3 - Lois de Comportement 1A - SDMGMPMohamed El HajjamPas encore d'évaluation
- A1 Critère Et Règle DécoulementDocument18 pagesA1 Critère Et Règle DécoulementKhalil AOUADPas encore d'évaluation
- 3 RDMPRFDocument18 pages3 RDMPRFKamal PcPas encore d'évaluation
- Curs 03Document22 pagesCurs 03Emmanuel Edgard PEMBIPas encore d'évaluation
- AISANCE AQUATIQUE e Valuation Paliers - Passation CollectiveDocument1 pageAISANCE AQUATIQUE e Valuation Paliers - Passation Collectivekojiki hearthstonienPas encore d'évaluation
- Élasticité Partie 2Document19 pagesÉlasticité Partie 2El Mcckenzy AkwensiviePas encore d'évaluation
- Cours 7Document34 pagesCours 7Mamoudou Bah DialloPas encore d'évaluation
- UntitledDocument1 pageUntitledDavid PassepontPas encore d'évaluation
- MouvementDocument10 pagesMouvementElafif HamdiPas encore d'évaluation
- TP Des Sollicitations SimplesDocument46 pagesTP Des Sollicitations Simplesaziz ouradaPas encore d'évaluation
- DEVOIR 11 OctobreDocument6 pagesDEVOIR 11 OctobreHeni HtiraPas encore d'évaluation
- ph4 1Document1 pageph4 1HarounSamihPas encore d'évaluation
- Partie 2Document5 pagesPartie 2fathallah karimPas encore d'évaluation
- Poster Loi Comportement en TractionDocument1 pagePoster Loi Comportement en Tractionapi-637602081Pas encore d'évaluation
- 3 - CisaillementDocument4 pages3 - CisaillementSamsouma BkPas encore d'évaluation
- Plasticité MasTechDocument4 pagesPlasticité MasTechHamza RouihemPas encore d'évaluation
- Null 7Document2 pagesNull 7yassinePas encore d'évaluation
- Resume de Strusture en BetonDocument34 pagesResume de Strusture en BetonMaster1 StructuresPas encore d'évaluation
- CTI2 04 Transmissions de Puissance Et Trains EpicycloidauxDocument2 pagesCTI2 04 Transmissions de Puissance Et Trains EpicycloidauxSeif HabbachiPas encore d'évaluation
- Essais MécaniquesDocument34 pagesEssais MécaniquesYounesse GJPas encore d'évaluation
- Fluage Et Relaxation: 1. Influence de La Morphologie Des ChaînesDocument4 pagesFluage Et Relaxation: 1. Influence de La Morphologie Des Chaîness2pkdskwdkPas encore d'évaluation
- Formulaire TopoDocument12 pagesFormulaire TopoazaizPas encore d'évaluation
- Cours RheologieDocument51 pagesCours RheologieKha LidPas encore d'évaluation
- Mecanique Des Structures 2Document120 pagesMecanique Des Structures 2Monny MOMPas encore d'évaluation
- Traction Simple Beton ArméDocument4 pagesTraction Simple Beton ArméAymen MizouniPas encore d'évaluation
- 01-Colas 2Document1 page01-Colas 2MohamedAhfourPas encore d'évaluation
- Cours Méthodes de CaractérisationDocument113 pagesCours Méthodes de CaractérisationBilal LatrechPas encore d'évaluation
- 01-Résistance Des MatériauxDocument15 pages01-Résistance Des MatériauxMat MatttPas encore d'évaluation
- Mécanique 22Document17 pagesMécanique 22Ikram RiguetPas encore d'évaluation
- SMP S5 Mav TD02Document2 pagesSMP S5 Mav TD02ezzahidysaid91Pas encore d'évaluation
- CM06 Sections CompressionDocument8 pagesCM06 Sections CompressionKay Chan SothearaPas encore d'évaluation
- GAMME TREILLIS - MartiniqueDocument1 pageGAMME TREILLIS - Martiniqueazeaze eazeazePas encore d'évaluation
- Curs 04Document20 pagesCurs 04Emmanuel Edgard PEMBIPas encore d'évaluation
- Elastic Deformations FrenchDocument1 pageElastic Deformations FrenchGhada MouedhenPas encore d'évaluation
- Accouplement Tampon Elastique Ne H A5 183 A5 - 183 Lmod1Document4 pagesAccouplement Tampon Elastique Ne H A5 183 A5 - 183 Lmod1François LenchonPas encore d'évaluation
- BlueSteel RPT PneuDocument4 pagesBlueSteel RPT Pneusiuluis1Pas encore d'évaluation
- Notion de Contrainte - SDDocument35 pagesNotion de Contrainte - SDstephane dorbePas encore d'évaluation
- Chap 10 Tolérances Géométriques Fanchon Ed. Nathan 2004Document15 pagesChap 10 Tolérances Géométriques Fanchon Ed. Nathan 2004mopPas encore d'évaluation
- La30bvibrations0607pdf PDF FreeDocument51 pagesLa30bvibrations0607pdf PDF FreeAdel AdenanePas encore d'évaluation
- Résumé Du Cours: Systèmes Triphasés: I J 1 U Z Z Z 1 I V UDocument1 pageRésumé Du Cours: Systèmes Triphasés: I J 1 U Z Z Z 1 I V UAchref HermiPas encore d'évaluation
- Lexique CM Et RDMDocument370 pagesLexique CM Et RDMAndriambelo100% (2)
- Actividad 1 Julissa AbrahamDocument2 pagesActividad 1 Julissa Abrahamjulissaabraham431Pas encore d'évaluation
- RésuméDocument27 pagesRésumélekaramzzPas encore d'évaluation
- Chapitre 6Document7 pagesChapitre 6Mohsen SaidiPas encore d'évaluation
- Feuille de Nivellement Direct (Vierge)Document1 pageFeuille de Nivellement Direct (Vierge)juleslebrun4050Pas encore d'évaluation
- 2819Document20 pages2819Fadi WeslatiPas encore d'évaluation
- Acoplamento Elástico Tipo BIPEXDocument1 pageAcoplamento Elástico Tipo BIPEXMarcio LopesPas encore d'évaluation
- 5 - Intro Raman PDFDocument20 pages5 - Intro Raman PDFDjalal DaouiPas encore d'évaluation
- Notes Physique DJDocument22 pagesNotes Physique DJaugustin.casaertPas encore d'évaluation
- Expose de Plasticite Groupe 2Document125 pagesExpose de Plasticite Groupe 2essokePas encore d'évaluation
- Catálogo Panelais Producciones - Ais 5G - Ais 3G y Ais ProDocument15 pagesCatálogo Panelais Producciones - Ais 5G - Ais 3G y Ais ProzuvalpaPas encore d'évaluation
- DTU 52.1 Carrelage Scellé Nov 2010Document41 pagesDTU 52.1 Carrelage Scellé Nov 2010legrandPas encore d'évaluation
- Liste Normes1Document8 pagesListe Normes1Saad El BouaziziPas encore d'évaluation
- PACTE - Isolation Thermique Extérieur Par Enduit Sur Polystyrène ExpanséDocument37 pagesPACTE - Isolation Thermique Extérieur Par Enduit Sur Polystyrène ExpanséproutPas encore d'évaluation
- Les Additifs Des Plastiques 2010Document1 pageLes Additifs Des Plastiques 2010LeifEricssonPas encore d'évaluation
- NDC ClotureDocument11 pagesNDC ClotureTaibi YoucefPas encore d'évaluation
- 4 - 1 Traction Des AciersDocument15 pages4 - 1 Traction Des Aciers7fjt8s2yhgPas encore d'évaluation
- Equipements Du Bâti 1: THERMIQUE DU BATIMENT (Phénomènes de Transfert de Chaleur Dans Le Bâtiment)Document2 pagesEquipements Du Bâti 1: THERMIQUE DU BATIMENT (Phénomènes de Transfert de Chaleur Dans Le Bâtiment)baho btwPas encore d'évaluation
- 1beton Arme Dcess 2014Document57 pages1beton Arme Dcess 2014YoussefBachiriPas encore d'évaluation
- Cimbéton - Retraitement LHR - T71Document164 pagesCimbéton - Retraitement LHR - T71MohamedAhfourPas encore d'évaluation
- Chapitre 3 MatDocument9 pagesChapitre 3 MatBaye DiopPas encore d'évaluation
- Hypothèse de CalculDocument7 pagesHypothèse de Calculbouaziz samiPas encore d'évaluation
- NDC Bache À Eau de 200m3 REV02Document16 pagesNDC Bache À Eau de 200m3 REV02Ahmed MokhtariPas encore d'évaluation
- UntitledDocument55 pagesUntitledOUSSAMA BEN OMARPas encore d'évaluation
- Note de Calcul Reservoir 1000 m3Document17 pagesNote de Calcul Reservoir 1000 m3azddine100% (1)
- RD ResDocument37 pagesRD Resoussama fatihPas encore d'évaluation
- Leçon 1 - Etude Des Materiaux CompositesDocument3 pagesLeçon 1 - Etude Des Materiaux CompositesMichelPas encore d'évaluation
- Mémoire de Magister Acier GalvaniséDocument130 pagesMémoire de Magister Acier GalvaniséAmina Malek AyaPas encore d'évaluation
- METREC V2012: Calculer Un Quantitatif de MatériauxDocument40 pagesMETREC V2012: Calculer Un Quantitatif de MatériauxISAAC SOGLOPas encore d'évaluation
- Ola DevisDocument5 pagesOla DevisjeanhermesmoussaPas encore d'évaluation
- Descente - de - Charge Pour Le ReservoirDocument3 pagesDescente - de - Charge Pour Le ReservoirericnadPas encore d'évaluation
- Citeo Guide Tarifs 2023 FR 1-2Document16 pagesCiteo Guide Tarifs 2023 FR 1-2Thomas LhrnPas encore d'évaluation
- TD Béton Armé 1 L3 2020 2021 1Document40 pagesTD Béton Armé 1 L3 2020 2021 1Meziane Ykhlef100% (1)
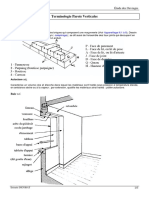
- Terminologie Parois VerticalesDocument3 pagesTerminologie Parois VerticalesThinhinaneGuedriPas encore d'évaluation
- Cours Séance 2Document18 pagesCours Séance 2Rania MfarrejPas encore d'évaluation
- Chapitreiii Les LiantsDocument21 pagesChapitreiii Les LiantsMahmoud AlmhbobPas encore d'évaluation
- Rapport FRDocument5 pagesRapport FRAmine FerhaniPas encore d'évaluation
- Chapitre III Le VerreDocument49 pagesChapitre III Le Verrezoom scaipPas encore d'évaluation
- Problème 4Document4 pagesProblème 4christina ndong nkoghePas encore d'évaluation