Vous aimerez peut-être aussi
- CM06 Sections CompressionDocument8 pagesCM06 Sections CompressionKay Chan SothearaPas encore d'évaluation
- Gamme NT DilatoflexDocument1 pageGamme NT DilatoflexFranz SchalkePas encore d'évaluation
- Résumé Comptabilité CompletDocument12 pagesRésumé Comptabilité Completyoussef KharrazPas encore d'évaluation
- 4 Msure Et IntégrationDocument7 pages4 Msure Et Intégrationcharles EvannPas encore d'évaluation
- T TapDocument1 pageT TapOktovianus TeguhPas encore d'évaluation
- Chap 10 Tolérances Géométriques Fanchon Ed. Nathan 2004Document15 pagesChap 10 Tolérances Géométriques Fanchon Ed. Nathan 2004mopPas encore d'évaluation
- AGTHERM-Attentesélectriques - Rev0 2Document1 pageAGTHERM-Attentesélectriques - Rev0 2Dimitri MurzeauPas encore d'évaluation
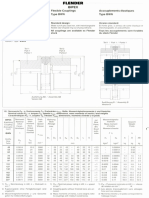
- Acoplamento Elástico Tipo BIPEXDocument1 pageAcoplamento Elástico Tipo BIPEXMarcio LopesPas encore d'évaluation
- Cours Principe Fond Amen Tale de La Statique ProfDocument5 pagesCours Principe Fond Amen Tale de La Statique Profabder2222Pas encore d'évaluation
- Aide Memoire Novembre 2013 PDFDocument37 pagesAide Memoire Novembre 2013 PDFzakaria jamesPas encore d'évaluation
- CM06 20151110 Sections CompressionDocument8 pagesCM06 20151110 Sections Compressiondatofds669Pas encore d'évaluation
- La Trigonométrie PDFDocument5 pagesLa Trigonométrie PDFCatherine KPas encore d'évaluation
- Fiche C1Document2 pagesFiche C1Mohamed DiaganaPas encore d'évaluation
- Résistance Des Matériaux: Dimensionnement Des Bois Travaillant en FlexionDocument20 pagesRésistance Des Matériaux: Dimensionnement Des Bois Travaillant en Flexionq.morice03Pas encore d'évaluation
- 3 RDMPRFDocument18 pages3 RDMPRFKamal PcPas encore d'évaluation
- IIIDocument25 pagesIIIIdris IssaadiPas encore d'évaluation
- BILAN DE PUISSANCE CantineDocument1 pageBILAN DE PUISSANCE CantineHotel SétifPas encore d'évaluation
- Tableau Torseur PlansDocument2 pagesTableau Torseur PlansDenis rouc100% (1)
- 1.modélisation de La PoutreDocument2 pages1.modélisation de La PoutrerouxmatheoPas encore d'évaluation
- Synthèse: Comportement Mécanique Des SystèmesDocument3 pagesSynthèse: Comportement Mécanique Des SystèmesOusmane NiangPas encore d'évaluation
- 3 PV Table 3Document1 page3 PV Table 3Waei SiasyPas encore d'évaluation
- Caracteristique Roulement 60 Ko PDF MC Guide Caracteristiques Roulements Lmod1Document3 pagesCaracteristique Roulement 60 Ko PDF MC Guide Caracteristiques Roulements Lmod1Rachid Ah-rramPas encore d'évaluation
- Corrigé D'examen Structures Métaliques Master 1 GCDocument3 pagesCorrigé D'examen Structures Métaliques Master 1 GCMidou MhmdPas encore d'évaluation
- 13813Document5 pages13813akreitPas encore d'évaluation
- RDM TORSIONDocument12 pagesRDM TORSIONBrahim NéciraPas encore d'évaluation
- Formulaire TopoDocument12 pagesFormulaire TopoazaizPas encore d'évaluation
- Elastic Deformations FrenchDocument1 pageElastic Deformations FrenchGhada MouedhenPas encore d'évaluation
- Nomenclature Des Aciers Poutres 1: Poutre 1A Poutre 2BDocument1 pageNomenclature Des Aciers Poutres 1: Poutre 1A Poutre 2BKouassi kan claude DibiPas encore d'évaluation
- 373134787-Metrologie-en-Genie-Climatique 23Document1 page373134787-Metrologie-en-Genie-Climatique 23darknightPas encore d'évaluation
- Pocket Stratophone 0823 ENDocument2 pagesPocket Stratophone 0823 ENsplentnaPas encore d'évaluation
- 6 Mesure de Probabilités (Mais Pas Seulement)Document6 pages6 Mesure de Probabilités (Mais Pas Seulement)charles EvannPas encore d'évaluation
- Résumé-Systemes Monophases Et Triphases-WatermarkDocument6 pagesRésumé-Systemes Monophases Et Triphases-WatermarkLaouini OussamaPas encore d'évaluation
- 5-Calcul Des ArbresDocument15 pages5-Calcul Des ArbresChokri AtefPas encore d'évaluation
- 114 Contraintes de 0 A ELU2 CircDocument3 pages114 Contraintes de 0 A ELU2 Circchahid abdelkadirPas encore d'évaluation
- Note de Calcul E.PDocument1 pageNote de Calcul E.PMustapha NajemPas encore d'évaluation
- Résumé Comptabilité Complet 1Document7 pagesRésumé Comptabilité Complet 1aminePas encore d'évaluation
- Chapitre 02 Introduction Aux Calculs Non Linaires en Simulation Numériques Version ElearningDocument64 pagesChapitre 02 Introduction Aux Calculs Non Linaires en Simulation Numériques Version ElearningTom BriderPas encore d'évaluation
- Loi de Biot Et SavartDocument2 pagesLoi de Biot Et SavartCamille DubucPas encore d'évaluation
- TESCOM Extrait Gamme DéverseursDocument20 pagesTESCOM Extrait Gamme DéverseursMachinPas encore d'évaluation
- Liste Moteurs TrameDocument3 pagesListe Moteurs TramePascal PaoliniPas encore d'évaluation
- Physique-Chimie 1Document1 pagePhysique-Chimie 1EugéniePas encore d'évaluation
- Sf039a FR Eu 1 PDFDocument3 pagesSf039a FR Eu 1 PDFChamseddine MerdasPas encore d'évaluation
- BR02200004U-v2 M2L FR A4 PDFDocument6 pagesBR02200004U-v2 M2L FR A4 PDFpopaminoPas encore d'évaluation
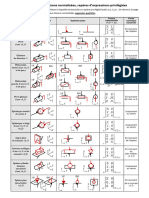
- Torseur Transmissible Des Liaisons Normailsées GénéralisationDocument1 pageTorseur Transmissible Des Liaisons Normailsées Généralisationabderrahmanouarrach2004Pas encore d'évaluation
- Carnet de SupportagesDocument1 pageCarnet de SupportagesSONGOPas encore d'évaluation
- Formules de DimensionnementDocument5 pagesFormules de DimensionnementahomojosephineePas encore d'évaluation
- Dynamique CoursDocument5 pagesDynamique CoursCyrille DjankouPas encore d'évaluation
- 30 DynamiqueDocument20 pages30 DynamiqueAKRAMPas encore d'évaluation
- Formulaire TopoDocument12 pagesFormulaire TopoSabriRemremPas encore d'évaluation
- Théories PDFDocument21 pagesThéories PDFCatherine KPas encore d'évaluation
- Poutre Isostatique1Document7 pagesPoutre Isostatique1IlayoPas encore d'évaluation
- CT22-XXX-XXX (Mesx239a-01)Document1 pageCT22-XXX-XXX (Mesx239a-01)Mateus SaPas encore d'évaluation
- Prédim 5.04Document37 pagesPrédim 5.04Leblanc ThierryPas encore d'évaluation
- MecaRelat MEEF M1-S1 TD4Document2 pagesMecaRelat MEEF M1-S1 TD4Youssef DahaniPas encore d'évaluation
- FlexionDocument4 pagesFlexionSamsouma BkPas encore d'évaluation
- Organigramme: Conception Et Calcul de Poteaux Non MixtesDocument4 pagesOrganigramme: Conception Et Calcul de Poteaux Non Mixtes3 éme infraPas encore d'évaluation
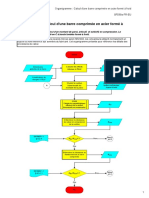
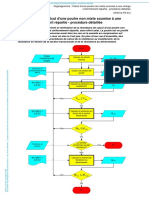
- Organigramme: Calcul D'une Poutre Non Mixte Soumise À Une Charge Uniformément Répartie - Procédure DétailléeDocument5 pagesOrganigramme: Calcul D'une Poutre Non Mixte Soumise À Une Charge Uniformément Répartie - Procédure Détaillée3 éme infraPas encore d'évaluation
- RDM Effort NormalDocument8 pagesRDM Effort NormalFranck TanoPas encore d'évaluation
- PHASAGE Type GDocument1 pagePHASAGE Type G何旭Pas encore d'évaluation
- La Religion Des Anciens BabyloniensDocument68 pagesLa Religion Des Anciens Babyloniensninzu0% (1)
- Article Commentaires de Marie Noelle Thabut Annee Liturgique A 1er Dimanche de Careme 13 Mars 2011 69139859Document14 pagesArticle Commentaires de Marie Noelle Thabut Annee Liturgique A 1er Dimanche de Careme 13 Mars 2011 69139859angelo okouPas encore d'évaluation
- Psychologie CoursDocument27 pagesPsychologie Coursqzm74l100% (1)
- 21 Logistiques Du Commerce InternationalDocument39 pages21 Logistiques Du Commerce InternationallionsafoinePas encore d'évaluation
- B+ de Toxi Alimentaires PDFDocument4 pagesB+ de Toxi Alimentaires PDFilyes zidPas encore d'évaluation
- JawadDocument3 pagesJawadaqlaty.yt59Pas encore d'évaluation
- Arrêté N°99-0893 MF-SG Du 18 Mai 1999 Déterminant La Fraction Représentative de L' Impôt SynthétiqueDocument2 pagesArrêté N°99-0893 MF-SG Du 18 Mai 1999 Déterminant La Fraction Représentative de L' Impôt SynthétiqueAbdoulaye Aziz MarikoPas encore d'évaluation
- Pêcher La Carpe Au Québec - Première PartieDocument6 pagesPêcher La Carpe Au Québec - Première PartieSergiu GuzunPas encore d'évaluation
- TD2 Etat Des Flux de Trésorerie 3LSC - (Énoncé & Corrigé)Document10 pagesTD2 Etat Des Flux de Trésorerie 3LSC - (Énoncé & Corrigé)heij10Pas encore d'évaluation
- Projet Biomaths - CUPIT-DESTERCKE-FERREIRA-FOURNIER-HISLEURDocument7 pagesProjet Biomaths - CUPIT-DESTERCKE-FERREIRA-FOURNIER-HISLEURFila HankPas encore d'évaluation
- La Maladie BehcetDocument63 pagesLa Maladie BehcetQuetzal Coatl100% (1)
- Evolution Ummo 1966 2018Document11 pagesEvolution Ummo 1966 2018scollePas encore d'évaluation
- Algérie, La Libération InachevéeDocument235 pagesAlgérie, La Libération InachevéeRedouane YahiaPas encore d'évaluation
- 4f5ee7553ecb3dade85d5734b7dad5bc4a28bb0edb9929d4cdce8b9a7ba45e9aDocument25 pages4f5ee7553ecb3dade85d5734b7dad5bc4a28bb0edb9929d4cdce8b9a7ba45e9ahafssaPas encore d'évaluation
- Burundi Sequences Pedagogiques PDFDocument44 pagesBurundi Sequences Pedagogiques PDFNeculeanu LilianaPas encore d'évaluation
- 17.appréhendez Le Cycle de Vie D'une Activité - Développez Votre Première Application Android - OpenClassroomsDocument1 page17.appréhendez Le Cycle de Vie D'une Activité - Développez Votre Première Application Android - OpenClassroomsWattman ThotPas encore d'évaluation
- Livre Innovation Organisationnelle Et Transformation Manageriale Par Le Design ThinkingDocument140 pagesLivre Innovation Organisationnelle Et Transformation Manageriale Par Le Design Thinkingمحمد فهمي100% (1)
- Chronologie Sociale 19ème Siècle en FranceDocument39 pagesChronologie Sociale 19ème Siècle en FranceFlorent KirschPas encore d'évaluation
- Procédure Régie GoodDocument8 pagesProcédure Régie GoodRatamasGuellehPas encore d'évaluation
- FICHE PRODUIT Béton Lissé PDFDocument2 pagesFICHE PRODUIT Béton Lissé PDFAhmed Ben AlayaPas encore d'évaluation
- Les Evangiles SynoptiquesDocument3 pagesLes Evangiles SynoptiquesShon TettegahPas encore d'évaluation
- Chapka PVT CGVDocument33 pagesChapka PVT CGVjeanneperelePas encore d'évaluation
- La Pratique de L'allaitement Maternel Exclusif Dans Le District D'avaradrano (VONJITSARA Aina Nikaria - 2007)Document52 pagesLa Pratique de L'allaitement Maternel Exclusif Dans Le District D'avaradrano (VONJITSARA Aina Nikaria - 2007)HayZara Madagascar100% (1)
- rajomaZafimbolaJM ESPA LC 12Document77 pagesrajomaZafimbolaJM ESPA LC 12Malcolm EmilePas encore d'évaluation
- Joker Male EnhancementDocument4 pagesJoker Male Enhancementjo kerPas encore d'évaluation
- Série JavaScript Correction 4SI TICDocument5 pagesSérie JavaScript Correction 4SI TICMoncef Computer83% (6)
- 4 Couts Complets PDFDocument6 pages4 Couts Complets PDFEnseignant UniversiatairePas encore d'évaluation
- Cours Architecture Par6Document5 pagesCours Architecture Par6Othmane EL BadlaouiPas encore d'évaluation
- Fiche Dida Maths Fractions Et Nombres DecimauxDocument8 pagesFiche Dida Maths Fractions Et Nombres Decimauxdpg94ttssbPas encore d'évaluation
- Fiche Pedagogique b1 Tes Belle Coeur de Pirate Par Clemence DoumengesDocument6 pagesFiche Pedagogique b1 Tes Belle Coeur de Pirate Par Clemence DoumengesZeggai APas encore d'évaluation