Vous aimerez peut-être aussi
- Cours ProgDocument43 pagesCours ProgATFP2013Pas encore d'évaluation
- INF1410 GuideStarUML-DiagrammeUML VTDocument32 pagesINF1410 GuideStarUML-DiagrammeUML VTHonoré ILUNGA NGOIEPas encore d'évaluation
- Caterpillar Manual de Partes D8TDocument1 158 pagesCaterpillar Manual de Partes D8Tjuan100% (3)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- (Analyse) Etau de Fraiseuse - e JMDocument3 pages(Analyse) Etau de Fraiseuse - e JMmarouf aek100% (3)
- TD La Commande Numerique Des Machines OutilsDocument2 pagesTD La Commande Numerique Des Machines OutilsWilliam DechangPas encore d'évaluation
- Production Mecanique: Cours deDocument111 pagesProduction Mecanique: Cours deAhmed KanounPas encore d'évaluation
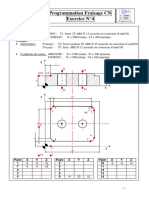
- Exercice 4Document2 pagesExercice 4Ahmed DjebbiPas encore d'évaluation
- TD Cisaillement ÉnoncéDocument3 pagesTD Cisaillement ÉnoncéJasser OueslatiPas encore d'évaluation
- Chapitre 5Document13 pagesChapitre 5Mou Héb RzPas encore d'évaluation
- Ptv-Roue À GorgeDocument5 pagesPtv-Roue À Gorgeadem bengharsaPas encore d'évaluation
- TD1 Correction CFAODocument4 pagesTD1 Correction CFAOEddehbi100% (1)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Cours FraisageDocument172 pagesCours FraisageHajar OumnasPas encore d'évaluation
- Chapitre 3 Fabrication Assistée Par Ordinateur 3 - Code GDocument49 pagesChapitre 3 Fabrication Assistée Par Ordinateur 3 - Code GAs ScofPas encore d'évaluation
- Designation VisserieDocument2 pagesDesignation VisserieGana100% (1)
- Catia v5 Machining Brochure FR PDFDocument8 pagesCatia v5 Machining Brochure FR PDFWalid BenaziPas encore d'évaluation
- CH3-Programmation PGP PDFDocument10 pagesCH3-Programmation PGP PDFahla77100% (1)
- Tournage Des Pièces MécaniquesDocument11 pagesTournage Des Pièces Mécaniqueskill3rxPas encore d'évaluation
- Exercice FAO PDFDocument7 pagesExercice FAO PDFtaher ncirPas encore d'évaluation
- Sinumerik810820 Mill FRDocument90 pagesSinumerik810820 Mill FRDick ManPas encore d'évaluation
- Mini ProjetDocument13 pagesMini ProjetSaif GuesmiPas encore d'évaluation
- Travail Demandé Sur La Mise en Position IsostatiqueDocument8 pagesTravail Demandé Sur La Mise en Position IsostatiqueAbdoulaye DIALLOPas encore d'évaluation
- Rapport BE1Document51 pagesRapport BE1ahmed017100% (1)
- Sujet AFS 2020 PrincipalDocument25 pagesSujet AFS 2020 PrincipalIbrahim Êl BæzPas encore d'évaluation
- Tp1 Fao FraisageDocument32 pagesTp1 Fao Fraisagemaraghni_hassine7592Pas encore d'évaluation
- Bureau Des Méthodes Gam Capot PliageDocument1 pageBureau Des Méthodes Gam Capot Pliagematrani100% (1)
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueNour Allah tabibPas encore d'évaluation
- 5450 Sujet 0 E42 Bts Ms Option SP 1Document46 pages5450 Sujet 0 E42 Bts Ms Option SP 1Chanol Noupa100% (1)
- 36 07 Mise en Position PDFDocument2 pages36 07 Mise en Position PDFAnas MohtadiPas encore d'évaluation
- Enonce A2Document2 pagesEnonce A2أحمد العابدPas encore d'évaluation
- COMPTE Rendu Tour MzhdiDocument7 pagesCOMPTE Rendu Tour MzhdiEl Hamdaoui YoussefPas encore d'évaluation
- Procédés Et Méthodes de Production 2Document57 pagesProcédés Et Méthodes de Production 2Karim CherniPas encore d'évaluation
- 87 - Repérage Des Axes ProfDocument3 pages87 - Repérage Des Axes ProfntayoubPas encore d'évaluation
- PFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFDocument98 pagesPFF Chafik Bilal Elyargui 2020-2021 - Groupe 1 PDFMouad BottePas encore d'évaluation
- Analyse Des Contraintes D'anterioritesDocument1 pageAnalyse Des Contraintes D'anterioritesazer kizerPas encore d'évaluation
- CNC MP 3Document13 pagesCNC MP 3siniorPas encore d'évaluation
- Cours Méthodes - Asma BELHADJ - 2GM ENIT - Introduction - EtudiantDocument6 pagesCours Méthodes - Asma BELHADJ - 2GM ENIT - Introduction - EtudiantluqmanPas encore d'évaluation
- GM 2Document39 pagesGM 2Youcef MimouniPas encore d'évaluation
- Micro TourDocument1 pageMicro TourGraba AbdelhakimPas encore d'évaluation
- Feuille Analyse Gamme UsinageDocument2 pagesFeuille Analyse Gamme UsinageBouhdida MohamedPas encore d'évaluation
- 16 EX9 PerceuseDocument1 page16 EX9 PerceuseChokri Atef100% (1)
- 1306 160 p32 PDFDocument12 pages1306 160 p32 PDFMohamed Amine SaadaPas encore d'évaluation
- Presentation Picos18Document22 pagesPresentation Picos18Saf Bes100% (1)
- Analyse BordeuseDocument20 pagesAnalyse BordeuseZied kallelPas encore d'évaluation
- TP4 - Taillage D'un Pignon Par Fraise Au ModuleDocument1 pageTP4 - Taillage D'un Pignon Par Fraise Au ModuleOussama Ouafik100% (1)
- Projet en Mécanique SéminiareDocument111 pagesProjet en Mécanique SéminiarengouoPas encore d'évaluation
- TD FaoDocument3 pagesTD FaoAmer ChaffaiPas encore d'évaluation
- Cours Tournage PDFDocument10 pagesCours Tournage PDFOumeima ChaoualiPas encore d'évaluation
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFDocument6 pagesTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- Modélisation Des AM - Robot 5 Axes (Correction)Document2 pagesModélisation Des AM - Robot 5 Axes (Correction)hufioPas encore d'évaluation
- DT Micro TourDocument2 pagesDT Micro Tourlou lou0% (1)
- Validation d'APEF - Cours - CorrigéDocument5 pagesValidation d'APEF - Cours - CorrigéAziz AmtdiPas encore d'évaluation
- CH1 Théorie de La CoupeDocument14 pagesCH1 Théorie de La CoupeEya Essayel100% (1)
- Technique de Déformation Plastique Sur Presse PDFDocument10 pagesTechnique de Déformation Plastique Sur Presse PDFAlexandrePas encore d'évaluation
- Contrat de Phase FraisageDocument2 pagesContrat de Phase FraisageIsmail OularbiPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsD'EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsPas encore d'évaluation
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.D'EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Pas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- PrésentationDocument17 pagesPrésentationMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Attestation de DonDocument1 pageAttestation de DonMOHAMED CHERIF KHATRAOUI100% (1)
- A Retenir - MA - PartieA PDFDocument2 pagesA Retenir - MA - PartieA PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Transmissions GénéralitésDocument24 pagesTransmissions GénéralitésMOHAMED CHERIF KHATRAOUI100% (1)
- A Retenir - MA - PartieB PDFDocument2 pagesA Retenir - MA - PartieB PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- A Retenir - MA - PartieB PDFDocument2 pagesA Retenir - MA - PartieB PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- F2023049Document24 pagesF2023049MOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- A Retenir - MA - PartieA PDFDocument2 pagesA Retenir - MA - PartieA PDFMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- DenturesDocument14 pagesDenturesMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- 1013Document12 pages1013Salah Eddine ChouikhPas encore d'évaluation
- Calcul Roulement PDFDocument50 pagesCalcul Roulement PDFcisse100% (1)
- AssemblageDocument21 pagesAssemblageMOHAMED CHERIF KHATRAOUI100% (5)
- Diaporama RLTDocument19 pagesDiaporama RLTMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Réducteur Éssuis-GlacesDocument12 pagesRéducteur Éssuis-GlacesMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Palier Carter AutoporteeDocument4 pagesPalier Carter AutoporteeMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Automobile - Boite de Vitesses Mécanique - FR 10 PGDocument10 pagesAutomobile - Boite de Vitesses Mécanique - FR 10 PGGuy FranklinPas encore d'évaluation
- PrésentationDocument17 pagesPrésentationMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Adherence FrottementDocument1 pageAdherence FrottementMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Cours AjustementsDocument6 pagesCours Ajustementsabder2222Pas encore d'évaluation
- FeuilletageDocument16 pagesFeuilletageMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Chapitre 2liaison CompleteDocument8 pagesChapitre 2liaison CompleteYouness El HamriPas encore d'évaluation
- 1013Document12 pages1013Salah Eddine ChouikhPas encore d'évaluation
- Réducteur de VitesseDocument38 pagesRéducteur de VitesseMOHAMED CHERIF KHATRAOUI100% (1)
- FeuilletageDocument16 pagesFeuilletageMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- Cahier de Charge ChevalierDocument2 pagesCahier de Charge ChevalierMOHAMED CHERIF KHATRAOUIPas encore d'évaluation
- 2100544632 (1)Document292 pages2100544632 (1)Saad Al HelyPas encore d'évaluation
- Cours Base de DonnéesDocument86 pagesCours Base de DonnéesRania MaizaPas encore d'évaluation
- Cours MVCDocument12 pagesCours MVCFatima-Ezzahra AIPas encore d'évaluation
- Slides Java 2022Document24 pagesSlides Java 2022Siham SlimaniPas encore d'évaluation
- Rapportfinale WalidDocument64 pagesRapportfinale WalidAyMen JendoubiPas encore d'évaluation
- Cours Java 2015Document35 pagesCours Java 2015minaPas encore d'évaluation
- Deviens Un Ninja Avec AngularDocument316 pagesDeviens Un Ninja Avec Angularbenjamin morellePas encore d'évaluation
- Livre - TP Asserv - Master Et Licence - Aissi SalimDocument96 pagesLivre - TP Asserv - Master Et Licence - Aissi SalimZakaria Mourtadi100% (1)
- Rapport de stageBEJAIADocument11 pagesRapport de stageBEJAIANesrine AllaouaPas encore d'évaluation
- Rational Unified Process Introduction Francais KrutchenDocument22 pagesRational Unified Process Introduction Francais KrutchenGuedalia100% (1)
- Gestion Des ProcessusincDocument25 pagesGestion Des ProcessusincLiL FivePas encore d'évaluation
- LOG8430-2018.1 - Winter - Plan de CoursDocument26 pagesLOG8430-2018.1 - Winter - Plan de CoursArash TorkamanPas encore d'évaluation
- Id 5900Document91 pagesId 5900Cybrary GhoulPas encore d'évaluation
- Cours7 POODocument36 pagesCours7 POOYoucef BensenouciPas encore d'évaluation
- ING-SYS - ASR301-5.0. MODELISATION SYSTEME AVEC SysML - RAPPELS UMLDocument152 pagesING-SYS - ASR301-5.0. MODELISATION SYSTEME AVEC SysML - RAPPELS UMLchris jmkPas encore d'évaluation
- Atelier Compilation Et DébogageDocument15 pagesAtelier Compilation Et Débogageghaitan00Pas encore d'évaluation
- Design PatternDocument10 pagesDesign PatternMoustapha BERPas encore d'évaluation
- 5 PHP PooDocument9 pages5 PHP Poosarrfallou267Pas encore d'évaluation
- Rapport 2Document24 pagesRapport 2David TchatPas encore d'évaluation
- Automate Programmable IndustrielDocument6 pagesAutomate Programmable IndustrielAbdessamad HajjiPas encore d'évaluation
- Management SCMDocument74 pagesManagement SCMNarjiss LagmiriPas encore d'évaluation
- Chapitre3 Les Concepts LiéesDocument33 pagesChapitre3 Les Concepts LiéesTikhizi AmaniPas encore d'évaluation
- Cours Langage C Module1 2023-2024 Esag Tig-Isi Sem-3Document41 pagesCours Langage C Module1 2023-2024 Esag Tig-Isi Sem-3authenticgolden3Pas encore d'évaluation
- Duru Fidele Ins1Document4 pagesDuru Fidele Ins1Fidele Lauly DuruPas encore d'évaluation
- Rapportversion FinalDocument60 pagesRapportversion FinalSara EL OUAGHLIDIPas encore d'évaluation
- Travaux Dirigés Régulation Ind. 21Document54 pagesTravaux Dirigés Régulation Ind. 21Amina LazregPas encore d'évaluation
- Mooc s5 1Document9 pagesMooc s5 1mobio jeanPas encore d'évaluation
- Architecture Applicatives CoursDocument122 pagesArchitecture Applicatives CourswasPas encore d'évaluation
- Développement Web: Upport de Cours Et Travaux PratiquesDocument15 pagesDéveloppement Web: Upport de Cours Et Travaux PratiquesPatrick SuarezPas encore d'évaluation