Vous aimerez peut-être aussi
- Temps Unitaires PDFDocument6 pagesTemps Unitaires PDFFadiga Kalilou80% (20)
- °td-Examens Optique-Geo FSM 2020 SMPCDocument36 pages°td-Examens Optique-Geo FSM 2020 SMPCBakary KeitaPas encore d'évaluation
- Radu Cinamar - Le Mystere EgyptienDocument207 pagesRadu Cinamar - Le Mystere Egyptienraoul ducool100% (1)
- Raport de TP Matériaux de ConstructionDocument57 pagesRaport de TP Matériaux de ConstructionMaroua LahbibPas encore d'évaluation
- 2ac Hydrostatique CorrigeDocument14 pages2ac Hydrostatique CorrigeMejdi Abassi75% (4)
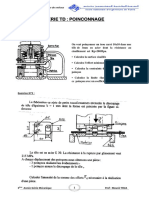
- TD PoinconnageDocument12 pagesTD Poinconnagegadri100% (4)
- Utilisation de La Compensation Série Avancée Dans Les Réseaux ÉlectriquesDocument85 pagesUtilisation de La Compensation Série Avancée Dans Les Réseaux Électriquesrahimoetl92% (13)
- 12 - Synthese de L'aspirine CorDocument6 pages12 - Synthese de L'aspirine CorChartier Julien100% (3)
- Caract Pet PBTDocument67 pagesCaract Pet PBTguetardPas encore d'évaluation
- Regressions Et Trajectoires 3DDocument34 pagesRegressions Et Trajectoires 3DJJacquelin100% (11)
- Moyen de Controle de SoudureDocument17 pagesMoyen de Controle de SoudureFilaliAbderrahimPas encore d'évaluation
- ROULAGEDocument3 pagesROULAGEFilaliAbderrahimPas encore d'évaluation
- Corrige 6Document6 pagesCorrige 6FilaliAbderrahimPas encore d'évaluation
- Corrige 3Document3 pagesCorrige 3FilaliAbderrahimPas encore d'évaluation
- JJGpliageDocument10 pagesJJGpliageHassan AzmiPas encore d'évaluation
- Corrige 5Document4 pagesCorrige 5FilaliAbderrahimPas encore d'évaluation
- Frappe À Froid de L'acierDocument13 pagesFrappe À Froid de L'acierFilaliAbderrahim100% (2)
- ROULAGEDocument3 pagesROULAGEFilaliAbderrahimPas encore d'évaluation
- Modélisation Des ProcédésDocument15 pagesModélisation Des ProcédésFilaliAbderrahimPas encore d'évaluation
- MAT - Emboutissage - Le Travail Des Metaux en FeuillesDocument13 pagesMAT - Emboutissage - Le Travail Des Metaux en FeuillesNadia DridiPas encore d'évaluation
- Corrige 5Document4 pagesCorrige 5FilaliAbderrahimPas encore d'évaluation
- Corrige 4Document3 pagesCorrige 4FilaliAbderrahimPas encore d'évaluation
- Corrige 7Document6 pagesCorrige 7FilaliAbderrahimPas encore d'évaluation
- Corrige 11Document4 pagesCorrige 11FilaliAbderrahimPas encore d'évaluation
- Corrige 11Document4 pagesCorrige 11FilaliAbderrahimPas encore d'évaluation
- Corrige 4Document3 pagesCorrige 4FilaliAbderrahimPas encore d'évaluation
- Corrige 7Document6 pagesCorrige 7FilaliAbderrahimPas encore d'évaluation
- Corrige 6Document6 pagesCorrige 6FilaliAbderrahimPas encore d'évaluation
- Corrige 6Document6 pagesCorrige 6FilaliAbderrahimPas encore d'évaluation
- Corrige 4Document3 pagesCorrige 4FilaliAbderrahimPas encore d'évaluation
- Serie NN4Document2 pagesSerie NN4FilaliAbderrahimPas encore d'évaluation
- Serie 7Document2 pagesSerie 7FilaliAbderrahimPas encore d'évaluation
- Serie 3Document2 pagesSerie 3FilaliAbderrahimPas encore d'évaluation
- Serie 11Document2 pagesSerie 11FilaliAbderrahimPas encore d'évaluation
- Serie 5Document1 pageSerie 5FilaliAbderrahimPas encore d'évaluation
- Poulie-Couroie & Pignon Et Chaine PDFDocument14 pagesPoulie-Couroie & Pignon Et Chaine PDFFilaliAbderrahimPas encore d'évaluation
- Serie 6Document2 pagesSerie 6FilaliAbderrahimPas encore d'évaluation
- Serie NN4Document2 pagesSerie NN4FilaliAbderrahimPas encore d'évaluation
- CAO AssemblageDocument4 pagesCAO AssemblageFilaliAbderrahimPas encore d'évaluation
- ! Séries D'exercices ! Sujets Corrigés ! Fiches Mémo: Edition BaldDocument59 pages! Séries D'exercices ! Sujets Corrigés ! Fiches Mémo: Edition BaldAminata PouyePas encore d'évaluation
- Electrocinetique Filtres PDFDocument6 pagesElectrocinetique Filtres PDFSiraj ChahbounPas encore d'évaluation
- Les Ondes Lumineuse: National Polytechnic School of ConstantineDocument12 pagesLes Ondes Lumineuse: National Polytechnic School of ConstantineSamah BoughanemPas encore d'évaluation
- Projet de Département Géosciences Et Génie CivilDocument14 pagesProjet de Département Géosciences Et Génie CivilOmar Rodriguez del VillarrealPas encore d'évaluation
- GlycérideDocument59 pagesGlycérideImi GossePas encore d'évaluation
- TP 1Document4 pagesTP 1Sęl Må75% (4)
- Rapport FM Final PDFDocument32 pagesRapport FM Final PDFAbdo hoda100% (2)
- Alternative Methods For EMC Testing in SituDocument12 pagesAlternative Methods For EMC Testing in SitucatryssePas encore d'évaluation
- Construction Metallique: Dahmani Lahlou Professeur À L'université Mouloud Mammeri de Tizi-OuzouDocument17 pagesConstruction Metallique: Dahmani Lahlou Professeur À L'université Mouloud Mammeri de Tizi-OuzoulhabsPas encore d'évaluation
- Clefs: Les Énergies Les ÉnergiesDocument108 pagesClefs: Les Énergies Les Énergiesguglu doljno bit pohPas encore d'évaluation
- TD L1 S1 Biomeca 2023 StatiqueDocument40 pagesTD L1 S1 Biomeca 2023 Statiquevxcfmy2j4tPas encore d'évaluation
- PenetronDocument2 pagesPenetronyoussefPas encore d'évaluation
- ALGODocument42 pagesALGOstrideworldPas encore d'évaluation
- Ajp jp4199404C104 PDFDocument19 pagesAjp jp4199404C104 PDFPaz BalladaresPas encore d'évaluation
- Giroux Solutions 4.8Document4 pagesGiroux Solutions 4.8Yannick DsprbsPas encore d'évaluation
- Projet EtabsDocument67 pagesProjet Etabsjazmine genie74100% (9)
- Page Machines E5Document4 pagesPage Machines E5tresorkaomba1Pas encore d'évaluation
- TP2 RDMDocument9 pagesTP2 RDMHanan KebahPas encore d'évaluation
- Fluage Fbaguelin Jubile F. SchlosserDocument29 pagesFluage Fbaguelin Jubile F. SchlosserBenlala Aghiles AzzedinePas encore d'évaluation
- BOUYAHIAOUI Oussama KOUROUGHLI Mohamed Amin PDFDocument96 pagesBOUYAHIAOUI Oussama KOUROUGHLI Mohamed Amin PDFHhhh100% (2)