Vous aimerez peut-être aussi
- Devoir 3 Modele 5 Si 2 Bac SM B Semestre 1Document16 pagesDevoir 3 Modele 5 Si 2 Bac SM B Semestre 1lemsouguerPas encore d'évaluation
- - - - - - إمتحان تجريبي رقم 1 في مادة علوم المهندس 2014 2015 السنة الثانية بكالوريا علوم رياضية.pdf - 725Document18 pages- - - - - إمتحان تجريبي رقم 1 في مادة علوم المهندس 2014 2015 السنة الثانية بكالوريا علوم رياضية.pdf - 725khadija achtouiPas encore d'évaluation
- ds1 Sta 2019Document4 pagesds1 Sta 2019Ines BaazizPas encore d'évaluation
- Devoircorrigdesynthsen3 Gniemcaniquesystmedegrnaillageetdecontrledebrut Bactechnique2012 2013mrbenab 150523230907 Lva1 App6892Document14 pagesDevoircorrigdesynthsen3 Gniemcaniquesystmedegrnaillageetdecontrledebrut Bactechnique2012 2013mrbenab 150523230907 Lva1 App6892Otman OtoPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Poinçonneuse Automatique de Jetons - 1ère AS (2014-2015) MR BAAZAOUI RaoufDocument3 pagesDevoir de Contrôle N°1 - Technologie Poinçonneuse Automatique de Jetons - 1ère AS (2014-2015) MR BAAZAOUI RaoufØűmãïmą MizouriPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 2ème Sciences (2014-2015) MR BAAZAOUI RaoufDocument8 pagesDevoir de Synthèse N°1 - Technologie Système de Remplissage Des Bouteilles en Huile D'olive - 2ème Sciences (2014-2015) MR BAAZAOUI Raoufimed100% (3)
- DC2-2 Info - 2021Document3 pagesDC2-2 Info - 2021Besbes ZiedPas encore d'évaluation
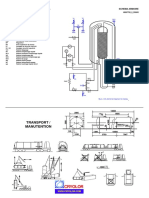
- Devoir de Contrôle N°1 Lycée Pilote - Technologie Remplissage Des Bouteilles de Gaz - 1ère AS (2014-2015) MR Mohamed HamzaDocument4 pagesDevoir de Contrôle N°1 Lycée Pilote - Technologie Remplissage Des Bouteilles de Gaz - 1ère AS (2014-2015) MR Mohamed Hamzaahmed tounsiPas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) Mme Toumi Imen Système Système de Lavage de BidonsDocument3 pagesDevoir de Contrôle N°1 - Technologie - 1ère AS (2009-2010) Mme Toumi Imen Système Système de Lavage de Bidonsأبوأحمد الجزيريPas encore d'évaluation
- 8c5lh-Unite Automatique de PDFDocument3 pages8c5lh-Unite Automatique de PDFl mPas encore d'évaluation
- Tte 03 Ce 1Document4 pagesTte 03 Ce 1Djerbien Slouma100% (1)
- Exam 2 l3mTTDocument2 pagesExam 2 l3mTTHamza HassinePas encore d'évaluation
- DC2 2 SC2Document3 pagesDC2 2 SC2Adel KmimechPas encore d'évaluation
- ds1 SC 2020 2021Document8 pagesds1 SC 2020 2021Ahmed NajjarPas encore d'évaluation
- Mini Pro Jet 7 Ion Testeur Circuits Integres Et AOPDocument3 pagesMini Pro Jet 7 Ion Testeur Circuits Integres Et AOPMohamed Ben FredjPas encore d'évaluation
- Devoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFDocument14 pagesDevoir Corrigé de Synthèse N°2 - Génie Mécanique Unité de TRI Automatique Des Caisses - 3ème Technique (2013-2014) MR Ben Abdallah Marouan PDFYosra Flh100% (1)
- Compte Tour Pour Moto / MobyletteDocument4 pagesCompte Tour Pour Moto / Mobylettecris eloPas encore d'évaluation
- Volant Multifonction, À Partir D'avril 2010Document4 pagesVolant Multifonction, À Partir D'avril 2010Hotline EUROREPAR Car ServicePas encore d'évaluation
- Dossier Technique DS 2eme SC N 1Document1 pageDossier Technique DS 2eme SC N 1Youssef AouadiPas encore d'évaluation
- DC1 3st DT 2014Document3 pagesDC1 3st DT 2014Nejib JallouliPas encore d'évaluation
- TP Four Électrique C4 DR 2019Document6 pagesTP Four Électrique C4 DR 2019CAlou PsoPas encore d'évaluation
- Boitier Interface PCDocument2 pagesBoitier Interface PCacr_2767401Pas encore d'évaluation
- DT DC2 3ST 23 24Document3 pagesDT DC2 3ST 23 24Badreddine KraiemPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Système D'usinage A Plateau Tournant - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Système D'usinage A Plateau Tournant - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineOumayma BoudaboussPas encore d'évaluation
- TP1 MicrocontroleurDocument4 pagesTP1 MicrocontroleurTriphel MapakaPas encore d'évaluation
- Devoir de Synthese N°3: Disciplines TechniquesDocument4 pagesDevoir de Synthese N°3: Disciplines TechniquesJUSDOVIC EDJOZOMBIPas encore d'évaluation
- DS11 2017 - 2018Document8 pagesDS11 2017 - 2018Ridha Manaa100% (1)
- Eclairage Conciergerie A1 PDFDocument1 pageEclairage Conciergerie A1 PDFAnani FernandPas encore d'évaluation
- Série Dexercices Corrigés Grafcets Du Bac Technique en TunisieDocument4 pagesSérie Dexercices Corrigés Grafcets Du Bac Technique en Tunisiehanabenamor100% (4)
- Chapitre A1 24 UALDocument4 pagesChapitre A1 24 UALAngus MakPas encore d'évaluation
- Brochure Multi9Document14 pagesBrochure Multi9Abdelfetteh FriaaPas encore d'évaluation
- Cahier #2 Documents RessourcesDocument8 pagesCahier #2 Documents RessourceskhakadamPas encore d'évaluation
- schemaelectriqueHTE2417Document1 pageschemaelectriqueHTE2417fab gerPas encore d'évaluation
- 14 Manitou MT 1435Document4 pages14 Manitou MT 1435DiksadyPas encore d'évaluation
- Visio-Armoires 8Document32 pagesVisio-Armoires 8Amri ChakerPas encore d'évaluation
- InspectionDocument2 pagesInspectiondavijg jhgfjPas encore d'évaluation
- Pro Mix 01Document31 pagesPro Mix 01labekaPas encore d'évaluation
- Vue Eclatee Charpente MetalliqueDocument1 pageVue Eclatee Charpente Metalliqueabdelkader.elfkihbenahmed.etu21Pas encore d'évaluation
- Ad-2 LFPTDocument7 pagesAd-2 LFPTakouadri066Pas encore d'évaluation
- 5692 Dos - Ressource Sous Epr.e22 Bac Pro MM Opta Metropole Antilles Septembre 2014Document7 pages5692 Dos - Ressource Sous Epr.e22 Bac Pro MM Opta Metropole Antilles Septembre 2014Zouhaier GhanmiPas encore d'évaluation
- DT dc2 2015Document1 pageDT dc2 2015Rami AliPas encore d'évaluation
- Cours Electronique 2008 GrenobleDocument27 pagesCours Electronique 2008 GrenobleHasan RajawiPas encore d'évaluation
- BC SiemensDocument2 pagesBC SiemensEsteban QuitoPas encore d'évaluation
- E.222.i.101 FraDocument12 pagesE.222.i.101 FraAbdelhakszn SznPas encore d'évaluation
- Devoir de Synthèse N1-2ati-2012Document6 pagesDevoir de Synthèse N1-2ati-2012Rafik KhazriPas encore d'évaluation
- t2 SCH Inf2015Document3 pagest2 SCH Inf2015Moustapha HanePas encore d'évaluation
- Datasheet Delta - DVP-SA2 - I - MUL - 20140513 PDFDocument20 pagesDatasheet Delta - DVP-SA2 - I - MUL - 20140513 PDFedevaldwilsonPas encore d'évaluation
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- DCN°3 3ScT 16-17 DTDocument3 pagesDCN°3 3ScT 16-17 DTBouabdellaoui saif ennasr100% (1)
- 080 - Plan Schema Armoire H0007783 0Document1 page080 - Plan Schema Armoire H0007783 0Abdullah FazilPas encore d'évaluation
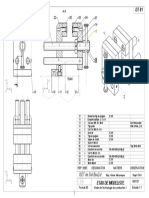
- EtauDocument1 pageEtauMahrez ZaafouriPas encore d'évaluation
- ACFrOgBYc1LEeeyIbcMBO2CLoFQjfe - N4eSD284mpYVU4Fjy6UKlcRTrOOLIxgs7 kSehbRHRiVHdbe646K02vldUs1f6flILOHHCOu3m0 naAnMNPAODlRKTU - utzYX0aR4BX2UK3KmcTYLpRRDocument4 pagesACFrOgBYc1LEeeyIbcMBO2CLoFQjfe - N4eSD284mpYVU4Fjy6UKlcRTrOOLIxgs7 kSehbRHRiVHdbe646K02vldUs1f6flILOHHCOu3m0 naAnMNPAODlRKTU - utzYX0aR4BX2UK3KmcTYLpRRAhmed Bnzi100% (1)
- dc2 3tech 2011 2012Document7 pagesdc2 3tech 2011 2012Bouabdellaoui saif ennasrPas encore d'évaluation
- DC2 4ST 2008Document6 pagesDC2 4ST 2008Chine MakPas encore d'évaluation
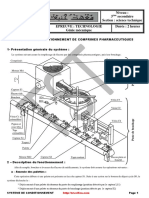
- Systeme de Conditionnement de Comprimes PharmaceutiquesDocument7 pagesSysteme de Conditionnement de Comprimes Pharmaceutiquessaber mecheri100% (3)
- Schema - Hydraulique TAD151 PDFDocument1 pageSchema - Hydraulique TAD151 PDFgirardPas encore d'évaluation
- SSP 041 Boîte de Vitesses À 6 Rapports 02MDocument34 pagesSSP 041 Boîte de Vitesses À 6 Rapports 02MlemsouguerPas encore d'évaluation
- Première Circulaire Colloque AIC 2021-Mohammedia-1Document4 pagesPremière Circulaire Colloque AIC 2021-Mohammedia-1lemsouguerPas encore d'évaluation
- Cours Systeme de Transf MouvDocument6 pagesCours Systeme de Transf MouvlemsouguerPas encore d'évaluation
- Guide NutritionDocument24 pagesGuide NutritionlemsouguerPas encore d'évaluation
- KF Demarrage ExpressDocument17 pagesKF Demarrage ExpresslemsouguerPas encore d'évaluation
- Table Composition Aliments2012 BTS DietetiqueDocument5 pagesTable Composition Aliments2012 BTS DietetiquelemsouguerPas encore d'évaluation
- Dessin TechniqueDocument14 pagesDessin TechniquelemsouguerPas encore d'évaluation
- COURS - PROJECTIONS ORTHOGONALES (Les Vues) - eDocument4 pagesCOURS - PROJECTIONS ORTHOGONALES (Les Vues) - elemsouguerPas encore d'évaluation
- COURS Coupes Et Sections Fiche 5 6 PRDocument2 pagesCOURS Coupes Et Sections Fiche 5 6 PRlemsouguerPas encore d'évaluation
- Correspondance Des VuesDocument7 pagesCorrespondance Des VueslemsouguerPas encore d'évaluation
- Laminage À Chaud - DécapageDocument5 pagesLaminage À Chaud - DécapageYounes AlamiPas encore d'évaluation
- 10 - Resistance Au FeuDocument27 pages10 - Resistance Au FeuGénie civil100% (1)
- Lacertis 9.0Document2 pagesLacertis 9.0DavidPas encore d'évaluation
- 03 Diag PhaseDocument61 pages03 Diag PhaseMohsen Saidi100% (1)
- Équipement Électrique 306 DieselDocument37 pagesÉquipement Électrique 306 Dieseldamienm49100% (2)
- 943386239le MouvementDocument3 pages943386239le MouvementNassim ChraitiPas encore d'évaluation
- AssemDocument25 pagesAssemsarayoussef751189Pas encore d'évaluation
- Colle S25 PCSI Sujet Thermo E CDocument2 pagesColle S25 PCSI Sujet Thermo E ChadilPas encore d'évaluation
- COURS PontDocument25 pagesCOURS PontmostafaPas encore d'évaluation
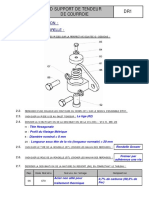
- TD SUPPORT PRDocument2 pagesTD SUPPORT PRmasteratsiiPas encore d'évaluation
- ResultatsDocument18 pagesResultatssmail djelladPas encore d'évaluation
- Tour ParalleleDocument6 pagesTour ParalleleErraji HichamPas encore d'évaluation
- TD Étude Statique D'une Structure Spatial PARTIE A ET D PDFDocument2 pagesTD Étude Statique D'une Structure Spatial PARTIE A ET D PDFKITEMO juniorPas encore d'évaluation
- 9999 9999 186 FR-FRDocument360 pages9999 9999 186 FR-FRmohcin2Pas encore d'évaluation
- Atex 1 BDocument61 pagesAtex 1 Bfranck RenéPas encore d'évaluation
- Rapport RoulementDocument7 pagesRapport RoulementChristian Nkomayombi100% (1)
- Résumé Bael 2015Document40 pagesRésumé Bael 2015mallymma50% (2)
- Coffre MotoriseDocument9 pagesCoffre MotoriseYoussef TrimechPas encore d'évaluation
- Transmission de Puissance: Compétences AttenduesDocument13 pagesTransmission de Puissance: Compétences AttenduesraouanemezianiPas encore d'évaluation
- Introduction À La Biophysique de La Circulation Sanguine-OkDocument13 pagesIntroduction À La Biophysique de La Circulation Sanguine-OkMohamedBahmed0% (1)
- Compte Rendue TP FraissageDocument18 pagesCompte Rendue TP FraissageABDESSAMAD EZZALMADI50% (6)
- CANIVEAUX 60x60Document2 pagesCANIVEAUX 60x60TRAOREPas encore d'évaluation
- 070 Compresseur A Vis Modulair de 75 A 40 CV PDFDocument8 pages070 Compresseur A Vis Modulair de 75 A 40 CV PDFMiraPas encore d'évaluation
- CM3 ASSEMBLAGES-generalitesDocument4 pagesCM3 ASSEMBLAGES-generalitesKhadija NdiayePas encore d'évaluation
- Assemblage Boulonné ISO Non PrécontraintDocument6 pagesAssemblage Boulonné ISO Non PrécontraintSalaheddine OURPas encore d'évaluation
- 2 Fileter-TarauderDocument4 pages2 Fileter-TarauderKhalid TamiPas encore d'évaluation
- Correction Sujet 1Document5 pagesCorrection Sujet 1Brahim AbdelliPas encore d'évaluation
- 2007 ShercoDocument60 pages2007 ShercoAnonymous BywpiUePas encore d'évaluation
- CT110f LNDocument35 pagesCT110f LNAmor GharsalliPas encore d'évaluation
- Chapitre 4 Dynamique Fluide IdéalDocument37 pagesChapitre 4 Dynamique Fluide IdéalNowe AhmadePas encore d'évaluation