Vous aimerez peut-être aussi
- TP1 HydrodistillationDocument3 pagesTP1 HydrodistillationAndrei GavrilaPas encore d'évaluation
- Poteau 1 - Note de CalculDocument3 pagesPoteau 1 - Note de CalculAdilGuizzaPas encore d'évaluation
- 05 RadiersDocument15 pages05 RadiersSaid Jabir50% (2)
- Construction MétalliqueDocument67 pagesConstruction MétalliqueYounes BourkhaPas encore d'évaluation
- Pecker - Dynamique Des Structures Et Des Ouvrages (Ed. 2006)Document225 pagesPecker - Dynamique Des Structures Et Des Ouvrages (Ed. 2006)angelomarinilliPas encore d'évaluation
- Eurocode 3 Calcul Des Assemblage BAS05Document2 pagesEurocode 3 Calcul Des Assemblage BAS05JockerzadPas encore d'évaluation
- QCM ChimieDocument5 pagesQCM ChimiemohamedtablaPas encore d'évaluation
- La Société SERGAZDocument32 pagesLa Société SERGAZAbdessattar Abdou100% (4)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- BSP 200 15 Attaque PDFDocument26 pagesBSP 200 15 Attaque PDFMegresAmir67% (3)
- 5 Statique Appliquee Poutre Et Structure PlaneDocument12 pages5 Statique Appliquee Poutre Et Structure PlaneSara GhazouaniPas encore d'évaluation
- Cours de Beton-Arme I 06 06 16Document75 pagesCours de Beton-Arme I 06 06 16Mélias ElvicePas encore d'évaluation
- Travaux Pratique en CND TP N°1Document4 pagesTravaux Pratique en CND TP N°1bouallegue_moun1806100% (2)
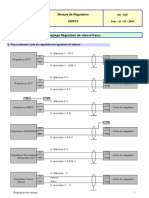
- Réglage Régulation KérysDocument5 pagesRéglage Régulation KérysFernando MendozaPas encore d'évaluation
- Sujet D'examen de Résistance Des Matériaux 2019Document8 pagesSujet D'examen de Résistance Des Matériaux 2019Lala BlanchePas encore d'évaluation
- Série 8 ExercicesDocument1 pageSérie 8 ExercicesAdam MounsiPas encore d'évaluation
- Serie 01Document2 pagesSerie 01I. M. A. DPas encore d'évaluation
- Mec 111Document7 pagesMec 111Yang ZhenfengPas encore d'évaluation
- CF-MST2 - Dut1 GC 4Document3 pagesCF-MST2 - Dut1 GC 4Charmarke AlihabibPas encore d'évaluation
- Chapitre 6 - in SituDocument9 pagesChapitre 6 - in Situmolk kallelPas encore d'évaluation
- Cours MEFDocument10 pagesCours MEFRadhi BHPas encore d'évaluation
- Etude de La Conjonction Poutre PlaqueDocument137 pagesEtude de La Conjonction Poutre PlaqueHammam KalouchPas encore d'évaluation
- (Code Aster) Conseil de Mise en Oeuvre de Calculs Non-Linéaire PDFDocument15 pages(Code Aster) Conseil de Mise en Oeuvre de Calculs Non-Linéaire PDFDuong Do NgocPas encore d'évaluation
- Poteau Mixte FeuDocument6 pagesPoteau Mixte Feusirjorgehidalgo7741Pas encore d'évaluation
- Lesson 0Document17 pagesLesson 0ate bibiPas encore d'évaluation
- D-07 Keong-AnDocument10 pagesD-07 Keong-AntarekhocinePas encore d'évaluation
- Poly Oa Enit Tome 2 2012Document17 pagesPoly Oa Enit Tome 2 2012jamal_aouzPas encore d'évaluation
- Chapitre 4 - Dimensionnement ParasismiqueDocument37 pagesChapitre 4 - Dimensionnement ParasismiquenihedPas encore d'évaluation
- FlexionDocument15 pagesFlexionAhmed HamadaPas encore d'évaluation
- 08-COURS BP CHapitre 8 - ET - EtudiantsDocument67 pages08-COURS BP CHapitre 8 - ET - Etudiantsmed sidi medPas encore d'évaluation
- Calcul Statique Des Cables (SETRA)Document11 pagesCalcul Statique Des Cables (SETRA)Abdrzk ChkriPas encore d'évaluation
- Classification Des Ponts G2Document23 pagesClassification Des Ponts G2Michael KassifaPas encore d'évaluation
- TD Chapitre 1Document5 pagesTD Chapitre 1Sokaina MaroufiPas encore d'évaluation
- Kassoul Amar 2011Document11 pagesKassoul Amar 2011SabriRemremPas encore d'évaluation
- Catalogue Cours Ingenieur Centrale ParisDocument246 pagesCatalogue Cours Ingenieur Centrale ParisnamousPas encore d'évaluation
- Rapportpfepagesdeleted 180620190147Document82 pagesRapportpfepagesdeleted 180620190147Mahmoud HawelPas encore d'évaluation
- Chapitre V Etude Pratique D'un Mur de SoutènementDocument19 pagesChapitre V Etude Pratique D'un Mur de SoutènementAbdelali SolPas encore d'évaluation
- Support RDM GMP 2Document28 pagesSupport RDM GMP 2Yannick AtsinaPas encore d'évaluation
- Plaques 2010Document41 pagesPlaques 2010didinePas encore d'évaluation
- Cemi42.5r FRDocument2 pagesCemi42.5r FRmouazen mostafaPas encore d'évaluation
- Module 18 Calcul Des Pannes Page 1 PDFDocument1 pageModule 18 Calcul Des Pannes Page 1 PDFYacine AounallahPas encore d'évaluation
- Cours RDM 4 FlexionDocument7 pagesCours RDM 4 Flexionyassine maktalPas encore d'évaluation
- Poly Dyn VibDocument73 pagesPoly Dyn Vibmehdi zakaria100% (1)
- CCV223-2009-Session 1 Avec CorrectionaDocument15 pagesCCV223-2009-Session 1 Avec CorrectionaTareck Bou JaoudePas encore d'évaluation
- Dynamique Des Structures 2-SPDDL Equations de MouvementDocument63 pagesDynamique Des Structures 2-SPDDL Equations de Mouvementnesrine hamidiPas encore d'évaluation
- Chapitre 1Document21 pagesChapitre 1Amal BouchlaghmiPas encore d'évaluation
- 2009 09 Polynesie Exo1 Correction Moto 6ptsDocument3 pages2009 09 Polynesie Exo1 Correction Moto 6ptshichammouffakPas encore d'évaluation
- CCV223-2009-Session 1 Avec CorrectionasafaafagagagsDocument4 pagesCCV223-2009-Session 1 Avec CorrectionasafaafagagagsTareck Bou JaoudePas encore d'évaluation
- Eurocode 0 - Bases de Calcul Des StructuresDocument5 pagesEurocode 0 - Bases de Calcul Des StructuresMustapha MezgranePas encore d'évaluation
- Chapitre 4Document25 pagesChapitre 4Mourad GcvPas encore d'évaluation
- Résume + Cours IPT MPDocument35 pagesRésume + Cours IPT MPYasser El hattabiPas encore d'évaluation
- CH IX Théorie Des Plaques 2021Document7 pagesCH IX Théorie Des Plaques 2021Hamza HaikiPas encore d'évaluation
- Données SismiquesDocument1 pageDonnées SismiquesAbdelbaki YoussefPas encore d'évaluation
- ENPC-DL - Ponts Construits A L'avancement Et Ponts PoussesDocument87 pagesENPC-DL - Ponts Construits A L'avancement Et Ponts Poussesahmad gouziPas encore d'évaluation
- CNAM ResistanceDesMateriaux3 Annee2009-2010 Chapitre4Document12 pagesCNAM ResistanceDesMateriaux3 Annee2009-2010 Chapitre4Youssef AouniPas encore d'évaluation
- Analyse Des Caractéristiques Mécaniques Des Matériaux Utilisés en Construction Mixte (Acier-Béton)Document89 pagesAnalyse Des Caractéristiques Mécaniques Des Matériaux Utilisés en Construction Mixte (Acier-Béton)Rayan BITOUTPas encore d'évaluation
- Chapitre2 Exo PDFDocument2 pagesChapitre2 Exo PDFIlyes BenhacenePas encore d'évaluation
- 03 FatigueDocument57 pages03 FatigueFarahPas encore d'évaluation
- Cours EHTPDocument25 pagesCours EHTPYassine ElmouradPas encore d'évaluation
- Mini-Projet de Conception Des PontsDocument8 pagesMini-Projet de Conception Des PontsDoukali Mohamed AnasPas encore d'évaluation
- 4 Elements EcondairesDocument37 pages4 Elements EcondairesmidouPas encore d'évaluation
- Yeghnem RedhaDocument10 pagesYeghnem Redhaok59Pas encore d'évaluation
- Etude Tablier PontDocument8 pagesEtude Tablier Pontewa1988Pas encore d'évaluation
- CIV355 BetonArme Chap3 Chap4Document32 pagesCIV355 BetonArme Chap3 Chap4Zahi AlkhaledPas encore d'évaluation
- Examen 2022-2023 S1 VOA Elasticité SolutionDocument3 pagesExamen 2022-2023 S1 VOA Elasticité SolutionRoi DadaPas encore d'évaluation
- Chapitre 2 Terminologie D'un Hall IndustrielDocument10 pagesChapitre 2 Terminologie D'un Hall IndustrielSouhaiel AjmiPas encore d'évaluation
- Poteau Armatures PDFDocument4 pagesPoteau Armatures PDFANDRIAMANANTSOAPas encore d'évaluation
- Application Methode Deplacement (EXO)Document15 pagesApplication Methode Deplacement (EXO)Eden St CyrPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- Formules A Connaitre Par CoeurDocument2 pagesFormules A Connaitre Par Coeurmeda012Pas encore d'évaluation
- ROBOT - Calcul Sismique - Spectrale - Prise en Compte Du Mode Résiduel - Robot Structural Analysis Products - Autodesk Knowledge NetworkDocument10 pagesROBOT - Calcul Sismique - Spectrale - Prise en Compte Du Mode Résiduel - Robot Structural Analysis Products - Autodesk Knowledge Networkmeda012Pas encore d'évaluation
- 1stabilite StructureDocument5 pages1stabilite Structuremeda012Pas encore d'évaluation
- Conception ContreventementDocument6 pagesConception Contreventementmeda012Pas encore d'évaluation
- Chapitre3 Contreventements 2016 - UnlockedDocument14 pagesChapitre3 Contreventements 2016 - UnlockedWalid BecharPas encore d'évaluation
- Serie 6 CorrigeDocument3 pagesSerie 6 Corrigemeda012Pas encore d'évaluation
- Chapitre II FinDocument51 pagesChapitre II FinMil MilPas encore d'évaluation
- Totem SolarisDocument6 pagesTotem Solarismacao100Pas encore d'évaluation
- C10Phy - Chute - Verticale - Exos - Stockes PDFDocument11 pagesC10Phy - Chute - Verticale - Exos - Stockes PDFAzizElheniPas encore d'évaluation
- Tarif VMCDocument60 pagesTarif VMCb0b33140Pas encore d'évaluation
- Devoir de Contrôle N°1 2019 2020 (Walid Jbali) (Ibn Rochd Menzel Bourguiba)Document3 pagesDevoir de Contrôle N°1 2019 2020 (Walid Jbali) (Ibn Rochd Menzel Bourguiba)MR.nadhir YTPas encore d'évaluation
- Chapitre3 Caracteristiques Geometriques Des Sections PlanesDocument13 pagesChapitre3 Caracteristiques Geometriques Des Sections Planesimed imdd100% (3)
- M1295 PDFDocument20 pagesM1295 PDFMohamedPas encore d'évaluation
- Essai de Compression PDFDocument9 pagesEssai de Compression PDFchouaibPas encore d'évaluation
- Rendement Des Moteurs PDFDocument4 pagesRendement Des Moteurs PDFNsanzimana PascalPas encore d'évaluation
- Cc1-8 S1 1ér Année Collège FRDocument2 pagesCc1-8 S1 1ér Année Collège FRsayouPas encore d'évaluation
- Aix Marseille Cjuin 1981Document3 pagesAix Marseille Cjuin 1981Junior AkobaraPas encore d'évaluation
- Notice Technique OryoDocument4 pagesNotice Technique OryoSemouDioufPas encore d'évaluation
- Détermination de La Puissance Du Générateur de ChaleurDocument5 pagesDétermination de La Puissance Du Générateur de ChaleurYoussef EL HamraouiPas encore d'évaluation
- Exercices Dapplication Acide BaseDocument4 pagesExercices Dapplication Acide BaseMaryem OurriPas encore d'évaluation
- Calculs DynamiquesDocument6 pagesCalculs Dynamiquesssarra99Pas encore d'évaluation
- ING1035 Final H04 S PDFDocument13 pagesING1035 Final H04 S PDFAbdallah SbaghdiPas encore d'évaluation
- Rapport Final ACSNI (Avril 2012) PDFDocument88 pagesRapport Final ACSNI (Avril 2012) PDFRichard PalisePas encore d'évaluation
- Le Reglement Parasismique Rps2000-Maroc - en 16 PointsDocument9 pagesLe Reglement Parasismique Rps2000-Maroc - en 16 PointsDon YassinePas encore d'évaluation
- Inside1930 2030Document77 pagesInside1930 2030dixitbhattaPas encore d'évaluation
- Cahier 3754 - Cahier Des Prescriptions Techniques Des Vitrages Extérieurs Attachés (VEA) PDFDocument38 pagesCahier 3754 - Cahier Des Prescriptions Techniques Des Vitrages Extérieurs Attachés (VEA) PDFBruno SilvaPas encore d'évaluation