Vous aimerez peut-être aussi
- MGD RobotPRRDocument3 pagesMGD RobotPRRPhantom Tonton100% (1)
- ExercisesDocument12 pagesExercisesPaul PatPas encore d'évaluation
- dm18 Mpsi Determinants - CirculantsDocument6 pagesdm18 Mpsi Determinants - Circulantsyoussef nigloryaPas encore d'évaluation
- Capteurs/actuateurs Auto PDFDocument23 pagesCapteurs/actuateurs Auto PDFyassine89% (9)
- MCD RobotSpheriqueDocument3 pagesMCD RobotSpheriquePhantom TontonPas encore d'évaluation
- CC2 - Calcul Des Structures 2016 - 2017 PDFDocument1 pageCC2 - Calcul Des Structures 2016 - 2017 PDFkjsghjPas encore d'évaluation
- Bac Gabon Maths 2012 Series CEDocument9 pagesBac Gabon Maths 2012 Series CEJérémie NdjoyePas encore d'évaluation
- Chapitre 2 TD Corrigés 1Document11 pagesChapitre 2 TD Corrigés 1rgtgui100% (1)
- TD 02Document6 pagesTD 02abdousewager8080Pas encore d'évaluation
- I 19 RmocaDocument5 pagesI 19 RmocatellurikPas encore d'évaluation
- Bouakaz 02Document14 pagesBouakaz 02Saad TaibiPas encore d'évaluation
- MA Examen 0506Document11 pagesMA Examen 0506Samir KarimPas encore d'évaluation
- Td2 Avec Corrige PartielDocument11 pagesTd2 Avec Corrige PartielelomaniparoPas encore d'évaluation
- Corrigé TD Cristallo-ChimieDocument4 pagesCorrigé TD Cristallo-ChimieChi faaPas encore d'évaluation
- TD4S2 2022-2023Document2 pagesTD4S2 2022-2023Souad SouadPas encore d'évaluation
- TP - N03 - DIAGNOSTIC - PDF Version 1Document4 pagesTP - N03 - DIAGNOSTIC - PDF Version 1org 2019Pas encore d'évaluation
- Contrôle - Continu 1 2023 2024 CorrigéDocument8 pagesContrôle - Continu 1 2023 2024 CorrigéLodvert T. POATYPas encore d'évaluation
- TD2 3Document3 pagesTD2 3ALIOU DIALLOPas encore d'évaluation
- 2021-2022 CC1 (Correction)Document4 pages2021-2022 CC1 (Correction)Hilal HamdanPas encore d'évaluation
- CN Phy ST 2019Document12 pagesCN Phy ST 2019abirchahed12Pas encore d'évaluation
- Correction de La Série TD4Document3 pagesCorrection de La Série TD4lamine fayPas encore d'évaluation
- Chapitre2 Modèle Linéaire MultipleDocument14 pagesChapitre2 Modèle Linéaire Multiplesanae belhajPas encore d'évaluation
- TD1: Analyse Numérique Matricielle: A A, Si Et Seulement Si Il Existe A UDU T Où T Est La Matrice UTUDocument9 pagesTD1: Analyse Numérique Matricielle: A A, Si Et Seulement Si Il Existe A UDU T Où T Est La Matrice UTUDIAPas encore d'évaluation
- TD Inte Ügrales Multiples - Corrige ÜDocument8 pagesTD Inte Ügrales Multiples - Corrige ÜKhalil HsainePas encore d'évaluation
- MathsDocument4 pagesMathsDjibril TourePas encore d'évaluation
- TD2 SystemeslineairesDocument2 pagesTD2 SystemeslineairesGueye AlimatouPas encore d'évaluation
- DL 1 MP 2023Document3 pagesDL 1 MP 2023ALI ALIPas encore d'évaluation
- Série D'exercices Sur Les Determinants PDFDocument3 pagesSérie D'exercices Sur Les Determinants PDFMoulaye IbrahimPas encore d'évaluation
- Série D'exercices Sur Les Determinants PDFDocument3 pagesSérie D'exercices Sur Les Determinants PDFMoulaye IbrahimPas encore d'évaluation
- ExamDocument6 pagesExamNor YakinePas encore d'évaluation
- S 3 Ds 12017Document8 pagesS 3 Ds 12017Antoine PacoPas encore d'évaluation
- GEO M1 2010 Partiel CorrigeDocument5 pagesGEO M1 2010 Partiel CorrigeGEOFFROY AIHOUPas encore d'évaluation
- 2001 Hec S 1 Suj MSW ADocument3 pages2001 Hec S 1 Suj MSW AMarc TentiPas encore d'évaluation
- Yaya Toure L2Modelisation Projet EDO Simulation Numerique Du Systeme OscillantDocument15 pagesYaya Toure L2Modelisation Projet EDO Simulation Numerique Du Systeme OscillantYaya TouréPas encore d'évaluation
- M 133 PueDocument4 pagesM 133 PuehahaPas encore d'évaluation
- 2015 Ecricome-CorrigeDocument9 pages2015 Ecricome-CorrigeChaimae BouzaganePas encore d'évaluation
- Homotopie LaurentDocument37 pagesHomotopie LaurentalassamfouaponmfenjouPas encore d'évaluation
- Exochapitre 0 CorrDocument14 pagesExochapitre 0 Corranouchkantsika9Pas encore d'évaluation
- Examen M259 2018 2019 CorrigeDocument4 pagesExamen M259 2018 2019 CorrigearfPas encore d'évaluation
- IE12006 CorrigeDocument3 pagesIE12006 CorrigeredaPas encore d'évaluation
- Correction TD 3Document5 pagesCorrection TD 3عبداللهبنزنوPas encore d'évaluation
- AD Cor Meca01Document1 pageAD Cor Meca01t123medPas encore d'évaluation
- S7-Dynamique II - Série-CorrigéDocument5 pagesS7-Dynamique II - Série-CorrigéKartigenPas encore d'évaluation
- Tpn03 DiagDocument4 pagesTpn03 DiagAhmed Mehdi DALIPas encore d'évaluation
- SUJET - Mathématiques (MP-MPI-PC-PSI)Document4 pagesSUJET - Mathématiques (MP-MPI-PC-PSI)zinougftnPas encore d'évaluation
- TdrobotiqueDocument10 pagesTdrobotiquewalid kahlounPas encore d'évaluation
- PSI InterditDocument3 pagesPSI Interditلا إلٰه إلّا اللهPas encore d'évaluation
- MI2 Exo7Document2 pagesMI2 Exo7Mahamat AbdramanePas encore d'évaluation
- Abaque 1Document7 pagesAbaque 1Junior TchonaingPas encore d'évaluation
- Pages 79 A 99 de MAT6150Document21 pagesPages 79 A 99 de MAT6150Ro-Théodore JeanPas encore d'évaluation
- CC2 Mastermecaflu 1819 CorrigéDocument8 pagesCC2 Mastermecaflu 1819 CorrigéFatima Ezzahrae BOUITAPas encore d'évaluation
- VirielDocument8 pagesVirielImen SfarPas encore d'évaluation
- (T) U (T) Avec U (T) 1 Pour T 0 Et 0 Ailleurs (T) e - X (T) Tu (T)Document19 pages(T) U (T) Avec U (T) 1 Pour T 0 Et 0 Ailleurs (T) e - X (T) Tu (T)Mouhamed mmoPas encore d'évaluation
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocument6 pagesCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- Pm3 2Document21 pagesPm3 2Bucht BuchtPas encore d'évaluation
- Chapitre1 2Document36 pagesChapitre1 2Mohammed HachemiPas encore d'évaluation
- Nombres ComplexesDocument2 pagesNombres ComplexesnounousPas encore d'évaluation
- Concours Commun Polytechniques (CCINP) 2017 PSI Mathématiques CBDocument6 pagesConcours Commun Polytechniques (CCINP) 2017 PSI Mathématiques CBaf877732Pas encore d'évaluation
- Exo 27 MatricesDocument3 pagesExo 27 MatricesAhzen's AbPas encore d'évaluation
- TD 1 2 TD 1 CorrectionDocument5 pagesTD 1 2 TD 1 CorrectionPhantom TontonPas encore d'évaluation
- TD8 Logique Séquentiel-CompteursDocument3 pagesTD8 Logique Séquentiel-CompteursPhantom TontonPas encore d'évaluation
- TD6 - Additionneur Comparateur DecodeurDocument2 pagesTD6 - Additionneur Comparateur DecodeurPhantom Tonton100% (1)
- TD8 Logique Séquentiel-Compteur-corrigerDocument4 pagesTD8 Logique Séquentiel-Compteur-corrigerPhantom TontonPas encore d'évaluation
- TD5 CombinatoireDocument1 pageTD5 CombinatoirePhantom TontonPas encore d'évaluation
- td1 BinaireDocument3 pagestd1 BinairePhantom TontonPas encore d'évaluation
- td3 BoolDocument3 pagestd3 BoolPhantom TontonPas encore d'évaluation
- MCD PoignetRotuleDocument3 pagesMCD PoignetRotulePhantom TontonPas encore d'évaluation
- CC Actionneurs Fluidiques 17Document2 pagesCC Actionneurs Fluidiques 17Phantom TontonPas encore d'évaluation
- Fibre de CarboneDocument5 pagesFibre de CarbonePhantom TontonPas encore d'évaluation
- MCD RobotSCARA 4DDLDocument4 pagesMCD RobotSCARA 4DDLPhantom TontonPas encore d'évaluation
- CC Actionneurs Fluidiques 19Document2 pagesCC Actionneurs Fluidiques 19Phantom TontonPas encore d'évaluation
- CC Actionneurs Fluidiques 21Document3 pagesCC Actionneurs Fluidiques 21Phantom TontonPas encore d'évaluation
- CC Actionneurs Fluidiques 16Document2 pagesCC Actionneurs Fluidiques 16Phantom TontonPas encore d'évaluation
- CC Actionneurs Fluidiques 18Document3 pagesCC Actionneurs Fluidiques 18Phantom TontonPas encore d'évaluation
- CC Actionneurs Fluidiques 15Document1 pageCC Actionneurs Fluidiques 15Phantom TontonPas encore d'évaluation
- TP Api IiDocument11 pagesTP Api IiAdem AounPas encore d'évaluation
- Concours General Mathematiques 2002 SujetDocument5 pagesConcours General Mathematiques 2002 SujetkkstanPas encore d'évaluation
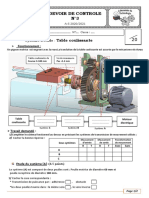
- Devoir de Controle N°3: Table CoulissanteDocument2 pagesDevoir de Controle N°3: Table CoulissanteTarekMostapha100% (1)
- Scomazzon Pasal SMZ926Document225 pagesScomazzon Pasal SMZ926hiriPas encore d'évaluation
- Maths 4-TD2Document3 pagesMaths 4-TD2bmessaad1970Pas encore d'évaluation
- PP2 Cor MathDocument69 pagesPP2 Cor MathtotoPas encore d'évaluation
- Détection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFDocument27 pagesDétection D'anomalies D'un Réseau Mobile MEGHERBI KHALEFminiya1703Pas encore d'évaluation
- Brochure Tech 2017 Techn Info Tournai 24pDocument28 pagesBrochure Tech 2017 Techn Info Tournai 24pDayang DayangPas encore d'évaluation
- TP6 Complx 2018-2019Document2 pagesTP6 Complx 2018-2019Hadjer KaddourPas encore d'évaluation
- UntitledDocument3 pagesUntitledyeheph yehephPas encore d'évaluation
- Doctorat BelhouchetDocument184 pagesDoctorat Belhouchetfootball goalPas encore d'évaluation
- Centrale, 2011, MP, Math Ematiques 1Document9 pagesCentrale, 2011, MP, Math Ematiques 1Max tekouPas encore d'évaluation
- cryptographie ٠٩٤٠٤٦Document67 pagescryptographie ٠٩٤٠٤٦Amina BenhassinePas encore d'évaluation
- Ficha 7.0702 31 Honda Civic TypeR GroupeA FN2Document20 pagesFicha 7.0702 31 Honda Civic TypeR GroupeA FN2HugoPas encore d'évaluation
- Serie MichelsonDocument8 pagesSerie MichelsonMD HM BCPas encore d'évaluation
- Hydrologie Statistique PDFDocument153 pagesHydrologie Statistique PDFAhlam RA100% (1)
- Poinçonnement: LIM SovanvichetDocument13 pagesPoinçonnement: LIM SovanvichetPhal KhemraPas encore d'évaluation
- Cours Infographie 1Document129 pagesCours Infographie 1Saf BesPas encore d'évaluation
- Fopc 0720916e 4241Document4 pagesFopc 0720916e 4241Cyrielle DomguePas encore d'évaluation
- Ex Ef PotenceDocument10 pagesEx Ef PotenceChafik BouguezourPas encore d'évaluation
- KD455.50 Préconisations Montage Démontage - FRDocument7 pagesKD455.50 Préconisations Montage Démontage - FReric pineauPas encore d'évaluation
- 06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Document1 page06.0165 - Chambre D'essai Sous Vide (Avec Vaccuometre) - 2Ghilles PoloPas encore d'évaluation
- TP SemaphoresDocument2 pagesTP Semaphoresعضوش محمدPas encore d'évaluation
- MedafDocument42 pagesMedafYesmine JasminePas encore d'évaluation
- Cours - Pic 16f628a PDFDocument11 pagesCours - Pic 16f628a PDFridofoxPas encore d'évaluation
- Exercice 1Document2 pagesExercice 1Nour elhoudaPas encore d'évaluation
- Ece 19 SVT 01 V1Document2 pagesEce 19 SVT 01 V1AlexPas encore d'évaluation
- Bimetre Sage Attic PDFDocument8 pagesBimetre Sage Attic PDFsarraPas encore d'évaluation
- TD RefrigerateurDocument4 pagesTD RefrigerateurAmine BenjamiaPas encore d'évaluation