LE BORD
DE MECANIQUE APPLIQUEE
Classes : PREMIERES & TERMINALES
Séries : F1, F2, F3, MA, MEB et MF/CM
V B1/0
1
K 3
y B
H B
y
A
2 4
V A1/0 z
x
A x
C
N4/1
O
1 1
x 3
Tendance au mouvement
C
B
2/5
A
1/5 2
C
B
direction possible 1
C D
direction possible 2
0
A
y
Fig. 1 : Mécanisme
Cable 3
Flêche 1
Charge 3
Fut 4
STATIQUE
CINEMATIQUE
RESISTANCE DES MATERIAUX
DYNAMIQUE
o L’essentiel du cours,
o QCM corrigés,
o Exercices corrigés
o Sujets de récents examens
Par : R. NGALSOUDI (Professeur des Lycées d’Enseignement Technique et Professionnel)
Ancien élève de l’ENSET de DOUALA.
Edition 2015
LE BORD DE MECANIQUE APPLIQUEE
SOMMAIRE
STATIQUE CINEMATIQUE
Chapitre 1 : Résolution d’un problème Chapitre 3 : Généralités sur la Cinématique………..31
par la méthode algébrique……………………......3
Mouvement de translation………………………...…31
Solide soumis à deux forces……………………....3
Mouvement de rotation………………………………31
Solide soumis à trois forces…………………….....5
Relations entre les paramètres de mouvement….......34
Solide soumis à quatre forces ou plus……...........9
Chapitre 4 : Mouvement plan………………………...37
Notion de frottement et adhérence………….…...14
Définition…………………………………………….37
Chapitre 2 : Résolution d’un problème
par la méthode graphique………………………...17 Equiprojectivité…………………………...………….37
Solide soumis à deux forces…………………......17
Solide soumis à trois ou quatre forces……….…..17 Double équiprojectivité………………………………39
Méthode simplifiée à trois forces concourantes...17 Centre Instantané de Rotation (C.I.R.)…………….…41
Méthode du dynamique et funiculaire………......20
RESISTANCE DES MATERIAUX
Méthode de Culman……………………………..24
Chapitre 5 : Généralités sur la RDM…………….….43
Q.C.M. STATIQUE……………………………....28 Chapitre 6 : Traction – Compression………………..47
DYNAMIQUE Chapitre 7 : Cisaillement simple………………….....49
Chapitre 11 : Travail et puissance…………………65 Chapitre 8 : Flexion simple………………...………..50
Travail………………………………………….. …65 Chapitre 9 : Torsion……………………………..…...54
Travail d’une force constante au cours d’un Chapitre 10 : Sollicitations composées….……….….58
déplacement rectiligne……………………………..65
ANNEXES : Sujets d’examens officiels
Travail d’une force constante au cours d’un
déplacement quelconque………………………......66
Correction des QCM
Travail d’un système de forces……………….……66
Probatoire F2-F3
Travail d’un Moment………………………………66
Probatoire de BT MEB
Travail d’un couple……………………………..….67
Brevet de technicien MEB
Puissance………………………………………..…67
Probatoire de BT MA-MF/CM
Puissance moyenne……………………………….. 67
Brevet de Technicien MA-MF/CM
Puissance développée par une force………………..67
Puissance développée par un couple…………….…67
Notion de Rendement……………………………...68
Q.C.M. DYNAMIQUE…………………..……..…...69
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
STATIQUE
La statique c’est la partie de la mécanique qui étudie l’équilibre d’un système
matériel. Il faut rappeler qu’un solide ou système matériel est dit en équilibre s’il est au repos,
ou animé d’un mouvement de translation /rotation uniforme et que ce sont ces forces qui
mettent en mouvement ou maintiennent au repos les solides. L’étude statique consistera donc
à manipuler les forces. On rencontrera alors les cas de solides en équilibre sous l’action de (2,
3, 4 ou plusieurs) forces. L’étude de l’équilibre statique est régie par un principe de
base appelé Principe Fondamental de la Statique (PFS).
Le principe fondamental de la statique s’énonce comme suit : Lorsqu’un système
matériel {E} est en équilibre dans un repère R donné, alors :
• La somme vectorielle des forces qui lui sont appliquées est égale au
vecteur nul. Et
• La somme algébrique des moments de ces forces par rapport à un point
quelconque du plan est nulle.
La traduction mathématique de ce qui précède donne :
{E} est en équilibre par rapport à un repère R, alors :
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝑬𝑬 = �𝟎𝟎⃗
∑ 𝑭𝑭
� ∀ 𝑨𝑨 ∈ 𝑹𝑹
∑ 𝑴𝑴𝑨𝑨 �𝑭𝑭⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝑬𝑬 = 𝟎𝟎
Dans le cas pratique, on choisira de calculer le moment au point ayant le plus d’inconnues à l’observation du tableau-bilan.
La résolution d’un problème de statique peut se faire de deux manières :
Par la méthode analytique encore appelée méthode algébrique : elle consiste à
résoudre son problème en procédant par des calculs mathématiques partant du PFS;
Par la méthode graphique : celle-ci consiste à résoudre le problème par des tracés
géométriques basés sur le PFS.
Le résultat attendu de la résolution d’un problème de statique est la détermination des
toutes les caractéristiques inconnues de forces à partir de celles qui sont données. Parmi ces
caractéristiques à déterminer figure en bonne place l’intensité encore appelée module. L’unité
de l’intensité d’une force est le Newton de symbole N.
1 𝑁𝑁 = 1 𝐾𝐾𝐾𝐾. 𝑚𝑚. 𝑠𝑠 −2
1 𝑑𝑑𝑑𝑑𝑑𝑑 = 10 𝑁𝑁
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 1 : RESOLUTION D’UN PROBLEME PAR LA METHODE ALGEBRIQUE
A- EQUILIBRE D’UN SOLIDE SOUS L’ACTION DE DEUX (2) FORCES
Si un solide est en équilibre sous l’effet de deux forces, il ya 2 certitudes à prendre en
compte :
Ces 2 forces ont même module.
Ces 2 forces sont directement opposées c’est-à-dire qu’elles sont de même direction
(cette direction n’est autre que la droite passant par les 2 points d’application
respectifs de ces forces, la droite (AB) dans l’exemple suivant) mais leurs sens sont
opposés.
Exemple 1: Observons la biellette 1 ci-dessous
A B
Le solide 1 ci-dessus a deux points de contact avec l'extérieur (les points A et B). 1 est donc soumis à deux forces FA en A et FB en B.
Ces deux forces ont un support commun: la droite (AB).
Le deux configurations possibles de leurs sens sont les suivants:
FA FB
A B
OU
1
FA FB
A B
Ces sens dépendent de la phase du fonctionnement dans lequel se trouve le mécanisme
Exemple 2 : Considérons le mécanisme (Fig. 1) ci-après:
B 1
C D 0
Fig. 1 : Mécanisme
On se propose de déterminer les actions mécaniques aux différentes articulations.
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
• Isolons (2)
Il y a deux cas de figure selon le fonctionnement :
B1/2 B1/2
B
2 B
2
ou
C
C
C0/2 0/2
• Tableau bilan :
Forces Point d’application Direction Sens Intensité
���������⃗
𝑩𝑩𝟏𝟏/𝟐𝟐 B ?
��������⃗
𝑪𝑪𝟎𝟎/𝟐𝟐 C ?
• Application du principe fondamental de la statique au solide ci-dessus :
� �𝑭𝑭⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝟐𝟐 = �𝟎𝟎⃗ (𝟏𝟏)
�
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝟐𝟐 = 𝟎𝟎
� 𝑴𝑴𝑪𝑪 𝑭𝑭 (𝟐𝟐)
𝐵𝐵1/2 + ���������⃗
(1) Equivaut à : ��������⃗ 𝐶𝐶0/2 = �⃗0 → 𝐵𝐵1/2 = − ���������⃗
��������⃗ 𝐶𝐶0/2
→ ���������⃗
𝐶𝐶0/2 𝑒𝑒𝑒𝑒 ��������⃗
𝐵𝐵1/2 sont directement opposés.
���������⃗
→ �𝐶𝐶 ��������⃗
0/2 � = �𝐵𝐵1/2 �
Conclusion : Les deux forces ���������⃗
𝐶𝐶0/2 𝑒𝑒𝑒𝑒 ��������⃗
𝐵𝐵1/2 sont de même direction (droite CB) ; de même
intensité et de sens contraires.
Exemple3 : Les solides 3 et 4 ci-dessous sont soumis chacun à deux forces :
D1/3
E
D 4
3 E1/4
F2/4
C
C2/3
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
On peut remarquer que les deux forces appliquées à chaque solide 3 ou 4 sont portées
par la même droite dans chacun des cas (les droites (DC) et (EF) respectivement). Les sens de
ces forces sont aussi chaque fois opposés.
On retient donc que dans le cas d’équilibre d’un solide soumis à 2 forces soit les deux
forces tendent à sortir de la matière du solide soit elles tendent à rentrer dans le solide mais
toujours suivant la même droite.
B- EQUILIBRE D’UN SOLIDE SOUS L’ACTION DE TROIS (3) FORCES
C’est le même et unique PFS qui s’applique dans tous les cas. La particularité se trouve au
niveau de la configuration des forces.
Si un solide est en équilibre sous l’effet de trois forces, il ya deux cas de figures possibles : les
trois forces sont soit concourantes soit parallèles.
a) Cas où les 3 forces sont concourantes en un point I du plan
Toujours du mécanisme précédent (Fig.1), isolons le solide (1). Il est en équilibre sous
l’action de trois forces en A, B et D. On suppose que toutes ces forces appartiennent au
même plan que les points A, B et D.
• Isolons (1)
A I A3/1
B 1
B2/1
D
Direction de D0/1
• Tableau bilan des forces
Forces Point d’application Direction Sens Intensité
��������⃗
𝑨𝑨𝟑𝟑/𝟏𝟏 A ?
���������⃗
𝑩𝑩𝟐𝟐/𝟏𝟏 B ?
���������⃗
𝑫𝑫𝟎𝟎/𝟏𝟏 D ?
• Application du principe fondamental de la statique :
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝟏𝟏 = �𝟎𝟎⃗ (𝟏𝟏)
∑ 𝑭𝑭
�
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝟏𝟏 = 𝟎𝟎 (𝟐𝟐)
∑ 𝑴𝑴𝑫𝑫 𝑭𝑭
��������⃗
(1) Equivaut à : 𝐴𝐴 ��������⃗ ��������⃗ �⃗
3/1 + 𝐵𝐵2/1 + 𝐷𝐷0/1 = 0
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
(2) Equivaut à : MD ������������⃗ �����������⃗
(𝐴𝐴3/1 ) + MD (𝐵𝐵 ������������⃗
2/1 ) + MD (𝐷𝐷0/1 ) = 0
Conclusion : Si les deux premières forces sont concourantes en un point I du plan alors le
��������⃗
support de la troisième passe également par I ϵ (P). En d’autres termes, comme 𝐴𝐴 ��������⃗
3/1 et 𝐵𝐵2/1
sont concourantes en I, alors le support de ��������⃗
𝐷𝐷0/1 passe aussi par I.
b) Cas où les 3 forces sont parallèles
La figure ci-dessous montre deux enfants en équilibre sur une balançoire.
��������⃗
On donne �𝐴𝐴 3/1 � = 312 𝑁𝑁 ; a = 1.7m ; b = 2m.
1 2
0 3
A O B
A1/3 B2/3
a b
• Isolons la balançoire (3)
O0/3 3
A B
O
A1/3 B2/3
a b
• Tableau bilan des forces
Forces P.A. Direction Sens Intensité
��������⃗
𝑨𝑨𝟏𝟏/𝟑𝟑 A 312 N
���������⃗
𝑩𝑩𝟐𝟐/𝟑𝟑 B ?
���������⃗
𝑶𝑶 𝟎𝟎/𝟑𝟑
O ?
Conclusion : Si les supports des deux premières forces sont parallèles, alors le support de la
troisième force est nécessairement parallèle aux deux autres (le support de 𝑂𝑂 ��������⃗
0/3 est parallèle aux
supports de ��������⃗ ��������⃗
𝐴𝐴1/3 et 𝐵𝐵 2/3 ).
• Application du principe fondamental de la statique
� 𝑭𝑭 �⃗
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝟑𝟑 = 𝟎𝟎 (𝟏𝟏)
�
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝟑𝟑 = 𝟎𝟎
� 𝑴𝑴𝑶𝑶 𝑭𝑭 (𝟐𝟐)
(1) Equivaut à : ��������⃗
𝐴𝐴 ��������⃗ ��������⃗ �⃗
1/3 + 𝐵𝐵2/3 + 𝑂𝑂0/3 = 0
Projection de (1) sur l’axe vertical : - A1/3 - B2/3 + O0/3 = 0 (*)
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
(2) Equivaut à : ��������⃗
MO (𝐴𝐴 ��������⃗ ��������⃗ �⃗
1/3 ) + MO (𝐵𝐵2/3 ) + MO (𝑂𝑂0/3 ) = 0
1.7×𝐴𝐴1/3
C’est-à-dire : 1.7x A1/3 - 2 B2/3 + 0 = 0 ; d’où 𝐵𝐵2/3 = (bras de levier)
2
1.7×312
AN : 𝐵𝐵2/3 = = 265.2 N
2
De la relation (*), on a : O0/3 = A1/3 + 2 B2/3 AN : O0/3 = 312 + 265.2 =577.2 N
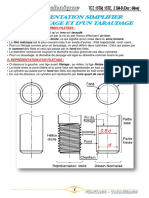
Exercice : Tuyau
y
0
4 E
B
C
5 2
3
6
A α 1 α D
H
G x
P (||P|| = 600 daN)
Un tuyau (1) de poids P est soulevé par l’intermédiaire de crochets (3 et 6), d’élingues (2 et 5) et d’un
anneau (4) dont les poids sont négligés. Données : AH = DH = 3.8 m ; α = 30°.
1) Isoler l’élingue S1 = {(5)}
2) Faire le bilan des actions appliquées à S1 dans un tableau bilan.
3) Isoler le système S2 = {Tuyau (1) + crochets (3 et 6)}.
4) Faire le bilan des actions appliquées au système S2 dans un tableau bilan.
5) Déterminer les actions appliquées à S2 en lui appliquant le PFS.
Solution
1) Isolons S1 = {(5)}
Le système S1= {(5)} est soumis à deux forces : en A et en B.
B4/5
B
5
A6/5
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
2) Bilan des actions appliquées à S2
S2 est soumis à l’action de deux forces :
Forces P.A. Direction Sens Intensité
��������⃗
𝑨𝑨𝟔𝟔/𝟓𝟓 A ?
���������⃗
𝑩𝑩𝟒𝟒/𝟓𝟓 B ?
3) Isolons le système (S2) = {(1) ; (3) ;(6)}
A5/S2 D2/S2
3
6
α
A 1 D
H
x
G
4) Bilan des actions mécaniques
S2 est soumis à l’action de trois forces :
Tableau bilan des forces :
Force Point d’application Direction Sens Intensité
A5/S2 A ?
D2/S2 D ?
PS2 G 6000 N
5) Application du PFS au système S2 Pour déterminer l’intensité des actions en A et D.
Le système S2 est en équilibre signifie :
�⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝑺𝑺𝑺𝑺 = �𝟎𝟎⃗
∑ 𝑭𝑭
�
∑ ���⃗ �⃗
𝑴𝑴𝑫𝑫 �𝑭𝑭⃗𝒆𝒆𝒆𝒆𝒆𝒆/𝑺𝑺𝑺𝑺 = 𝟎𝟎
�����������⃗
𝑨𝑨 ������������⃗ �������⃗ �⃗ (𝟏𝟏)
𝟓𝟓/𝑺𝑺𝑺𝑺 + 𝑫𝑫𝟐𝟐/𝑺𝑺𝑺𝑺 + 𝑷𝑷𝑺𝑺𝑺𝑺 = 𝟎𝟎
C'est-à-dire : �
𝑴𝑴𝑫𝑫 (𝑨𝑨���������������⃗ ��������������⃗ �����������⃗
𝟓𝟓/𝑺𝑺𝑺𝑺 ) + 𝑴𝑴𝑫𝑫 (𝑫𝑫𝟐𝟐/𝑺𝑺𝑺𝑺 ) + 𝑴𝑴𝑫𝑫 (𝑷𝑷𝑺𝑺𝑺𝑺 ) = 𝟎𝟎 (𝟐𝟐)
(1) sur l’axe horizontal : A5/S2Cos30° - D2/S2Cos30° + 0 = 0
��������������⃗ �����⃗ ����������⃗ −7.6 𝐴𝐴5/𝑆𝑆2 𝐶𝐶𝐶𝐶𝐶𝐶30°
De la relation (2), On aura : MD (𝐴𝐴 5/𝑆𝑆2 ) = 𝐷𝐷𝐷𝐷 ∧ 𝐴𝐴5/𝑆𝑆2 = � 0 ∧ 𝐴𝐴5/𝑆𝑆2 𝑆𝑆𝑆𝑆𝑆𝑆 30°
� (Produit vectoriel)
��������������⃗
MD (𝐴𝐴 5/𝑆𝑆2 ) = - 7.6 × 𝑨𝑨𝟓𝟓/𝑺𝑺𝟐𝟐 𝑺𝑺𝑺𝑺𝑺𝑺𝟑𝟑𝟑𝟑° N.m
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
MD ��������������⃗
(𝐷𝐷2/𝑆𝑆2 ) = 0 N.m Car ������������⃗
𝑫𝑫 𝟐𝟐/𝑺𝑺𝑺𝑺 passe par le point D.
����������⃗
MD (𝑃𝑃 �����⃗ ������⃗ −3.8
𝑆𝑆2 ) = 𝐷𝐷𝐷𝐷 ∧ 𝑃𝑃𝑆𝑆2 = � 0 ∧
0
� MD ����������⃗
(𝑃𝑃𝑆𝑆2 ) = 22800 N.m
− 6000
(2) Devient alors : - 7.6 × 𝐴𝐴5/𝑆𝑆2 𝑆𝑆𝑆𝑆𝑆𝑆30° + 0 + 22800 = 0
22800 22800
→ 𝐴𝐴5/𝑆𝑆2 = 𝐀𝐀𝐀𝐀 : 𝐴𝐴5/𝑆𝑆2 = = 6000 N
7.6×𝑆𝑆𝑆𝑆𝑆𝑆 30° 7.6×0.5
𝐴𝐴5/𝑆𝑆2 = 𝟔𝟔𝟔𝟔𝟔𝟔𝟔𝟔𝟔𝟔
La projection de (1) sur l’axe (A, x) nous donne :
𝐴𝐴5/𝑆𝑆2 𝐶𝐶𝐶𝐶𝐶𝐶30° - 𝐷𝐷2/𝑆𝑆2 𝐶𝐶𝐶𝐶𝐶𝐶30°= 0
𝐷𝐷2/𝑆𝑆2 = 𝐴𝐴5/𝑆𝑆2 = 6000 𝐷𝐷2/𝑆𝑆2 = 6000 N
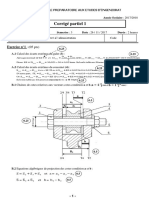
Exercice : Montage d’usinage
Le dispositif proposé fait partie d’un montage d’usinage. La pièce à usiner (4) est bridée en B par un
renvoi (3) articulé (liaison pivot) en C sur le bâti (1) du montage. Le serrage de la pièce est réalisé par
une vis de pression (2) agissant en A (contact ponctuel). Les poids des pièces sont négligés.
��������⃗
𝑨𝑨 𝟐𝟐/𝟑𝟑 (300 𝑑𝑑𝑑𝑑𝑑𝑑) représente l’action de la vis sur le renvoi, l’action du ressort est négligée.
1) Isoler le renvoi (3)
2) Faire le bilan des forces appliquées à (3) dans un tableau.
3) Déterminer toutes les actions mécaniques agissant sur le renvoi (3).
Réponses :
��������⃗
�𝐵𝐵 4/3 � = 346,875 𝑑𝑑𝑑𝑑𝑑𝑑 et �������������⃗
�𝐶𝐶 5+1/3 � = 458,609 𝑑𝑑𝑑𝑑𝑑𝑑
C- SOLIDE SOUMIS A L’ACTION DE QUATRE (4) FORCES OU PLUS
Sauf quelques cas remarquables, le problème d’équilibre de solides soumis à 4 forces ou
plus est résolu par les méthodes graphiques sur lesquelles nous reviendrons dans la suite de ce
document. Mais il est aussi possible de résoudre ces problèmes de façon algébrique.
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
a) Cas où les 4 forces sont parallèles
3
1
0 A B G C
Eau
Le dispositif ci-dessus est un plongeoir. Il est constitué de la planche 1. Le plongeur 3 qui se
trouve en C sur la planche a un poids 𝑷𝑷 �����⃗𝟐𝟐 de module 780 N. La planche 1, de poids ���⃗
𝑃𝑃1 de module
156 N appliqué en G, est articulée sur 0 en A et supportée par un appui simple sur 2 en B.
L’ensemble étant en équilibre,
1) Isoler la planche 1 ;
2) Dresser le tableau bilan des force extérieures appliquées à 1 ;
3) Déterminer analytiquement les modules des actions appliquées à la planche en A et B.
Solution :
1) Isolement de la planche 1
B2/1
1
A G C
B
A0/1 P1 C3/1
2) Tableau bilan des forces appliquées à la planche 1
Forces Point d’application Direction Sens Intensité
��������⃗
𝐴𝐴 0/1 A ?
��������⃗
𝐵𝐵 2/1 B ?
���⃗
𝑃𝑃1 G 156 N
�������⃗
𝐶𝐶 3/1 C 780 N
Remarque : C3/1 est équivalent à P2
10
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
3) Détermination analytique des modules des actions en A et B.
Application du PFS à la Planche 1 :
��������⃗ 𝐵𝐵2/1 + 𝑃𝑃�⃗1 + 𝐶𝐶⃗3/1 = 0
𝐴𝐴0/1 + ��������⃗ �⃗ (𝟏𝟏)
�
𝑀𝑀𝐴𝐴 �𝐴𝐴 ��������⃗ ��������⃗ �⃗ ⃗
0/1 � + 𝑀𝑀𝐴𝐴 �𝐵𝐵2/1 � + 𝑀𝑀𝐴𝐴 �𝑃𝑃1 � + 𝑀𝑀𝐴𝐴 �𝐶𝐶3/1 � = 0 (𝟐𝟐)
0 0 0
��������⃗
L’équation (1) équivaut à : 𝐴𝐴 0/1 �−𝐴𝐴
��������⃗
+ 𝐵𝐵 2/1 �𝐵𝐵 + 𝑃𝑃�⃗1 �−𝑃𝑃 + 𝐶𝐶⃗3/1 �−𝐶𝐶0 ���⃗�0
=0 0
1′
1′′
0/1 2/1 1 3/1
�����⃗ ∧ 𝐴𝐴
L’équation (2) équivaut à : 𝐴𝐴𝐴𝐴 ��������⃗ �����⃗ ��������⃗ �����⃗ ���⃗ �����⃗ ��������⃗
0/1 + 𝐴𝐴𝐴𝐴 ∧ 𝐵𝐵2/1 + 𝐴𝐴𝐴𝐴 ∧ 𝑃𝑃1 + 𝐴𝐴𝐴𝐴 ∧ 𝐶𝐶3/1 = 0
Soit : �𝑂𝑂0 ∧ 0
−𝐴𝐴0/1
� 100
+ �−2.5 ∧ 0
𝐵𝐵2/1
� + �235
0
∧ 0
−𝑃𝑃1
� + �355
0
∧ 0
−𝐶𝐶3/1
� =0
0 + 100𝐵𝐵2/1 − 235𝑃𝑃1 − 255𝐶𝐶3/1 = 0
100𝐵𝐵2/1 = 235𝑃𝑃1 + 255𝐶𝐶3/1
235𝑃𝑃1 +255𝐶𝐶3/1 235×156+255×780
𝐵𝐵2/1 =
100
AN : 𝐵𝐵2/1 = 100
= 2355,6
���������⃗
�𝑩𝑩 𝟐𝟐/𝟏𝟏 � = 𝟐𝟐𝟐𝟐𝟐𝟐𝟐𝟐, 𝟔𝟔 𝑵𝑵
La ligne 1’’ de l’équation (1) donne : −𝐴𝐴0/1 + 𝐵𝐵2/1 − 𝑃𝑃1 − 𝐶𝐶3/1 = 0
−𝐴𝐴0/1 = −𝐵𝐵2/1 + 𝑃𝑃1 + 𝐶𝐶3/1
𝐴𝐴0/1 = 𝐵𝐵2/1 − 𝑃𝑃1 − 𝐶𝐶3/1 AN: 𝐴𝐴0/1 = 2355,6 − 156 − 780 = 1419,6
��������⃗
�𝑨𝑨 𝟎𝟎/𝟏𝟏 � = 𝟏𝟏𝟏𝟏𝟏𝟏𝟏𝟏, 𝟔𝟔 𝑵𝑵
b) Cas où les 4 forces ne sont pas parallèles
Cable 3
Flêche 1
Charge 3
Fut 4
La figure ci-dessus représente la flèche d’une grue de 145 m de portée. La flèche 1 est
articulée en A sur le fut 4 et maintenue en C par le câble 3. La liaison 1-3 est un pivot d’axe
(C,z) avec un câble tendu. La flèche 1 supporte en E un chariot qui soulève une charge P2.
Hypothèses :
• Ce mécanisme admet le plan (A,x,y) de la figure comme plan de symétrie.
11
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Toutes les forces sont situées dans ce plan ou symétriquement par rapport à lui.
•
Le poids du câble 3 est négligeable par rapport au poids 𝑷𝑷
• �����⃗𝟏𝟏 de la flèche et 𝑷𝑷
�����⃗𝟐𝟐 de la
charge : �𝑷𝑷�����⃗𝟏𝟏 � = 𝟒𝟒𝟒𝟒 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵 ; �𝑷𝑷
�����⃗𝟐𝟐 � = 𝟔𝟔𝟔𝟔 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵
a) Isoler la flèche 1.
b) Dresser le tableau bilan des forces qui lui sont appliquées.
c) Déterminer analytiquement les modules des actions en A et C.
Solution
ê
b) Tableau bilan des forces
Forces P.A. Direction Sens Intensité
��������⃗
𝐴𝐴 2/1 A ? ? ?
�������⃗ ?
𝐶𝐶 4/1 C
���⃗ 6000 N
𝑃𝑃1 G
����⃗2
𝑃𝑃 E 10 000 N
c) Détermination analytique des modules des forces en A et C.
Application du PFS à la flèche 1 :
��������⃗
𝐴𝐴 ��������⃗ �⃗
2/1 + 𝐶𝐶4/1 + 𝑃𝑃1 + 𝑃𝑃2 = 0
�⃗ �⃗ (1)
�
𝑀𝑀𝐴𝐴 �𝐴𝐴��������⃗ ��������⃗ �⃗ �⃗
2/1 � + 𝑀𝑀𝐴𝐴 �𝐴𝐴2/1 � + 𝑀𝑀𝐴𝐴 �𝑃𝑃1 � + 𝑀𝑀𝐴𝐴 �𝑃𝑃2 � = 0 (2)
��������⃗
L’équation (1) équivaut à : 𝐴𝐴 𝐴𝐴𝑥𝑥 ��������⃗ −𝐶𝐶4/1 𝐶𝐶𝐶𝐶𝐶𝐶7° �⃗ 0 �⃗ 0 ���⃗ 0
2/1 � 𝐴𝐴 + 𝐶𝐶4/1 � 𝐶𝐶 𝑆𝑆𝑆𝑆𝑆𝑆 7° + 𝑃𝑃1 �−𝑃𝑃 + 𝑃𝑃2 �−𝑃𝑃 = 0 �0
1′
𝑦𝑦 4/1 1 2 1′′
�����⃗ ∧ 𝐴𝐴
L’équation (2) équivaut à : 𝐴𝐴𝐴𝐴 ��������⃗ �����⃗ ��������⃗ �����⃗ ���⃗ �����⃗ ����⃗
2/1 + 𝐴𝐴𝐴𝐴 ∧ 𝐶𝐶4/1 + 𝐴𝐴𝐴𝐴 ∧ 𝑃𝑃1 + 𝐴𝐴𝐴𝐴 ∧ 𝑃𝑃2 = 0
−𝐶𝐶4/1 𝐶𝐶𝐶𝐶𝐶𝐶7°
Soit : �𝑂𝑂0 ∧ 𝐴𝐴𝑥𝑥
𝐴𝐴𝑦𝑦
� + �87
35
∧ 𝐶𝐶4/1 𝑆𝑆𝑆𝑆𝑆𝑆 7°
� + �87
15
∧ 0
−𝑃𝑃1
� + �145
15
∧ 0
−𝑃𝑃2
� =0
Ce qui donne : 0 + 0 + 87𝐶𝐶4/1 𝑆𝑆𝑆𝑆𝑆𝑆7° + 35𝐶𝐶4/1 𝐶𝐶𝐶𝐶𝐶𝐶7° − 87𝑃𝑃1 + 0 − 145𝑃𝑃2 + 0 = 0
12
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
87𝐶𝐶4/1 𝑆𝑆𝑆𝑆𝑆𝑆7° + 35𝐶𝐶4/1 𝐶𝐶𝐶𝐶𝐶𝐶7° = 87𝑃𝑃1 + 145𝑃𝑃2
(87𝑆𝑆𝑆𝑆𝑆𝑆7° + 35𝐶𝐶𝐶𝐶𝐶𝐶7°)𝐶𝐶4/1 = 87𝑃𝑃1 + 145𝑃𝑃2
87𝑃𝑃1 +145𝑃𝑃2 87×6 000+145×10 000
𝐶𝐶4/1 = AN: 𝐶𝐶4/1 = = 43 491,9269
87𝑆𝑆𝑆𝑆𝑆𝑆 7°+35𝐶𝐶𝐶𝐶𝐶𝐶7° 87𝑆𝑆𝑆𝑆𝑆𝑆 7°+35𝐶𝐶𝐶𝐶𝐶𝐶7°
��������⃗
�𝑪𝑪 𝟒𝟒/𝟏𝟏 � = 𝟒𝟒𝟒𝟒 𝟒𝟒𝟒𝟒𝟒𝟒, 𝟗𝟗𝟗𝟗 𝑵𝑵
1’ donne : 𝐴𝐴𝑥𝑥 − 𝐶𝐶4/1 𝐶𝐶𝐶𝐶𝐶𝐶7° + 0 + 0 = 0
𝐴𝐴𝑥𝑥 = 𝐶𝐶4/1 𝐶𝐶𝐶𝐶𝐶𝐶7°
𝐴𝐴𝑥𝑥 = 43 491,92 × 𝐶𝐶𝐶𝐶𝐶𝐶7° 𝑨𝑨𝒙𝒙 = 𝟒𝟒𝟒𝟒 𝟏𝟏𝟏𝟏𝟏𝟏, 𝟕𝟕𝟕𝟕
1’’ donne : 𝐴𝐴𝑦𝑦 + 𝐶𝐶4/1 𝑆𝑆𝑆𝑆𝑆𝑆7° − 𝑃𝑃1 − 𝑃𝑃2 = 0
𝐴𝐴𝑦𝑦 = −43 491,92𝑆𝑆𝑆𝑆𝑆𝑆7° + 𝑃𝑃1 + 𝑃𝑃2
𝐴𝐴𝑦𝑦 = −43 491,92 × 𝑆𝑆𝑆𝑆𝑆𝑆7° + 6 000 + 10 000 𝑨𝑨𝒚𝒚 = 𝟏𝟏𝟏𝟏𝟏𝟏𝟏𝟏𝟏𝟏, 𝟔𝟔𝟔𝟔
��������⃗
�𝑪𝑪 2
𝟒𝟒/𝟏𝟏 � = �𝐴𝐴𝑥𝑥 + 𝐴𝐴𝑦𝑦
2 ��������⃗
AN : �𝑨𝑨 2
𝟐𝟐/𝟏𝟏 � = �(43 167,73) + (10 699,66 )
2
��������⃗
�𝑨𝑨 𝟐𝟐/𝟏𝟏 � = 𝟒𝟒𝟒𝟒 𝟒𝟒𝟒𝟒𝟒𝟒, 𝟗𝟗𝟗𝟗 𝑵𝑵
Exercice :
La figure ci-dessous donne le schéma d’une grue montée sur un socle circulaire de 8 m de diamètre.
�����⃗𝟏𝟏 � = 𝟒𝟒𝟒𝟒 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵 , à l’arrière de
Cette grue est constituée principalement d’une cabine 1 de poids �𝑷𝑷
laquelle un bac pouvant recevoir du gravier 2 jouant le rôle de contrepoids 𝑷𝑷 �����⃗𝟐𝟐 . La flèche 3 de poids
�����⃗𝟑𝟑 � = 𝟐𝟐𝟐𝟐 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵 est articulée en D sur 1 et est manœuvrée par un câble 4 lié en E et s’enroulant sur
�𝑷𝑷
un tambour lié en C sur 1. La charge 6 portée par l’intermédiaire du fil en acier 5 exerce une force ��⃗
𝑸𝑸
verticale descendante sur 3 en H. Les longueurs sont données en Mètre et les forces en Newton.
5
E
G3 3
C 4
6
2 G1
G2
P3
D
Q
P2
A P1 O B x
13
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
1) Calculer le poids minimal du gravier pour la stabilité de la grue à vide.
2) Calculer le poids maximal du gravier pour la stabilité de la grue à vide.
3) Calculer la charge maximale que peut soulever cette grue.
4) Isoler le câble 4. En déduire la direction des efforts appliqués à 4.
5) Isoler la flèche 3 et calculer pour Qmax les actions de contact en D et E.
Réponses : pour les 2 première questions, isoler l’ensemble {1 + 2 + 3 + 4} à vide ;
1) 4 forces ; pour cela la réaction du sol ��������⃗
𝑅𝑅1/6 se trouve en B et calculer le moment en B, on trouve
���������⃗
𝑃𝑃2𝑚𝑚𝑚𝑚𝑚𝑚 = 10 454,5 𝑁𝑁 2) 4 forces ; pour cela la réaction du sol 𝑅𝑅′ 1/6 se trouve en A et calculer le
moment en A, on trouve 𝑃𝑃2𝑚𝑚𝑚𝑚𝑚𝑚 = 217 000 𝑁𝑁 3) 5 forces ; 𝑄𝑄𝑚𝑚𝑚𝑚𝑚𝑚 correspond à 𝑃𝑃2𝑚𝑚𝑚𝑚𝑚𝑚 poids
�⃗ appliqué en H, le moment se calculant
maximal de gravier faisant contrepoids, dans le bilan, ajouter 𝑄𝑄
en B, on trouve 𝑄𝑄𝑚𝑚𝑚𝑚𝑚𝑚 = 90 880 𝑁𝑁 4) 2 forces ; droite (CE) 5) 4 forces ; Le moment se calcule au
point C, on trouve alors �𝐷𝐷 ��������⃗ ��������⃗
1/3 � = 788 743,53 𝑁𝑁 et �𝐸𝐸4/3 � = 754 954,18 𝑁𝑁
D) NOTION D’ADHERENCE ET DE FROTTEMENT
Le frottement ou l’adhérence sont ces phénomènes qui se créent au contact de solides.
Ils sont plus ou moins importants en fonction de la nature des surfaces en contact (rugueux
ou lisse), de la nature des matériaux en contact et de la vitesse relative de déplacement des
surfaces en contact. On parlera d’adhérence quand les deux solides demeurent en contact
malgré les efforts et de frottement dès lors qu’il ya mouvement relatif entre ces solides.
Le tableau ci-dessous présente les valeurs des coefficients de d’adhérence/frottement
en fonction des matériaux et de l’état des surfaces.
Valeurs indicatives de φ et φs Adhérence Frottement (glissement)
Nature des matériaux en contact 𝑓𝑓𝑠𝑠 = 𝑡𝑡𝑡𝑡𝑡𝑡𝜑𝜑𝑠𝑠 𝑓𝑓 = 𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡
A sec Lubrifié
A sec Lubrifié
Acier sur Acier 0,18 0,12
0,15 0,09
Acier sur Fonte 0,19 0,1
0,16 0,08 à 0,04
Acier sur Bronze 0,11 0,1
0,1 0,09
Téflon sur Acier 0,04 0,04
Fonte sur Bronze 0,1
0,2 0,08 à 0,04
Nylon sur Acier 0,35 0,12
Bois sur Bois 0,65 0,2 0,4 à 0,2 0,16 à 0,04
Métaux sur Bois 0,6 à 0,5 0,1 0,5 à 0,2 0,08 à 0,02
Métal sur Glace 0,02
Pneu voiture sur Route 0,8 0,6 0,3 à 0,1 sur sol mouillé
La relation entre angle d’adhérence/frottement 𝝋𝝋 et coefficient
d’adhérence/frottement 𝒇𝒇 est visible dans le tableau précédent.
𝒇𝒇 = 𝒕𝒕𝒕𝒕𝒕𝒕𝒕𝒕 soit 𝝋𝝋 = 𝒕𝒕𝒕𝒕𝒕𝒕−𝟏𝟏 𝒇𝒇
Suivant le fonctionnement souhaité, on s’arrangera à occasionner ou à éviter ces deux
phénomènes. Par exemple dans un mécanisme de freinage, on réunira les conditions pour
14
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
une adhérence/frottement importants alors dans un mécanisme de guidage en translation
ou en rotation, on tendra plutôt à créer des conditions pour lutter contre ces phénomènes.
L’existence de l’adhérence/frottement a des conséquences sur la façon d’aborder le
problème d’équilibre d’un solide qui y est impliqué à cause du fait de la déviation de la
direction de l’effort localisé au point de contact où l’adhérence/frottement existe. Cette
déviation se fait d’un angle φ par rapport à la normale. La normale c’est la direction que
devrait prendre la force de contact en l’absence des phénomènes d’adhérence/frottement ;
il faut savoir que la normale est perpendiculaire à la surface de contact.
La force de frottement/d’adhérence s’oppose à la tendance au mouvement.
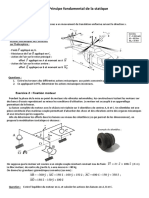
Exrcice : Le solide 5 isolé ci-dessous est soumis à trois forces en A, B et C. En B il ya
un frottement entre les solides 3 et 5 de coefficient 𝑓𝑓 = 0,21. Le solide 3 n’est pas
representé. On donne �𝐴𝐴��������⃗ ��������⃗ ��������⃗
1/5 � = 3000 𝑁𝑁. Déterminer les modules des efforts 𝐵𝐵3/5 et 𝐶𝐶2/5 .
Solution :
Isolement du solide 5 :
Tendance au
mouvement
C2/5
A 1/5
C direction possible 1
B
direction possible 2
Tableau bilan des forces appliquées à 5 :
Forces Point d’appl. Direction Sens Module
��������⃗
𝐴𝐴 1/5 A 3 000 N
��������⃗
𝐵𝐵3/5 B ?
��������⃗
𝐶𝐶2/5 C ? ? ?
Remarque : Il y a deux directions possibles de 𝐵𝐵 ��������⃗
3/5 (direction possible 1 et direction
possible 2 situées à 𝜑𝜑° de part et d’autre de la normale).
𝐿𝐿𝐿𝐿 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 𝑑𝑑𝑑𝑑 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 𝑓𝑓 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑é 𝑒𝑒𝑒𝑒𝑒𝑒 é𝑔𝑔𝑔𝑔𝑔𝑔 à 0.21. 𝑂𝑂𝑂𝑂 𝑜𝑜𝑜𝑜 𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 𝑞𝑞𝑞𝑞𝑞𝑞 𝑓𝑓 = 𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡
donc 𝜑𝜑 = 𝑡𝑡𝑡𝑡𝑡𝑡−1 𝑓𝑓 𝑐𝑐𝑐𝑐 𝑞𝑞𝑞𝑞𝑞𝑞 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑 𝜑𝜑 = 12°.
15
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Le solide 3 qui agit en B sur 5 se trouve à sa droite. Pour que l’action du solide 3 sur 5
s’oppose au déplacement, il doit agir suivant la direction 1, de la droite vers la gauche.
𝑩𝑩𝟑𝟑/𝟓𝟓 et ��������⃗
Détermination des modules des forces ���������⃗ 𝑪𝑪𝟐𝟐/𝟓𝟓
Application du PFS au solide 5 :
��������⃗
𝐴𝐴1/5 + ��������⃗ ��������⃗
𝐵𝐵3/5 + 𝐶𝐶 2/5 = 0
�⃗ (1)
�
𝑀𝑀𝐶𝐶 �𝐴𝐴��������⃗ ��������⃗ ��������⃗
1/5 � + 𝑀𝑀𝐶𝐶 �𝐵𝐵3/5 � + 𝑀𝑀𝐶𝐶 �𝐶𝐶2/5 � = 0 (2)
��������⃗ 𝐴𝐴 𝑐𝑐𝑐𝑐𝑐𝑐 60°
��������⃗ −𝐵𝐵 𝐶𝐶𝐶𝐶𝐶𝐶12°
��������⃗ 𝐶𝐶𝑥𝑥 ���⃗ 0 1′
L’équation (1) équivaut à : 𝐴𝐴 1/5 � 𝐴𝐴 𝑠𝑠𝑠𝑠𝑠𝑠 60° + 𝐵𝐵3/5 � −𝐵𝐵 𝑆𝑆𝑆𝑆𝑆𝑆 12° + 𝐶𝐶2/5 �𝐶𝐶 = 0 �0
1/5 3/5
1′′
1/5 3/5 𝑦𝑦
�����⃗ ∧ 𝐴𝐴
L’équation (2) équivaut à : 𝐶𝐶𝐶𝐶 ��������⃗ �����⃗ ��������⃗ �����⃗ ��������⃗
1/5 + 𝐶𝐶𝐶𝐶 ∧ 𝐵𝐵3/5 + 𝐶𝐶𝐶𝐶 ∧ 𝐶𝐶2/5 = 0
𝐴𝐴1/5 𝑐𝑐𝑐𝑐𝑐𝑐 60° −𝐵𝐵3/5 𝐶𝐶𝐶𝐶𝐶𝐶12°
Soit : �−60
−25
∧ 𝐴𝐴1/5 𝑠𝑠𝑠𝑠𝑠𝑠 60°
� 40
+ �−5 ∧ −𝐵𝐵3/5 𝑆𝑆𝑆𝑆𝑆𝑆 12°
� + �00 ∧ 𝐶𝐶𝑥𝑥
𝐶𝐶𝑦𝑦
� =0
Ce qui donne : −60𝐴𝐴1/5 𝑠𝑠𝑠𝑠𝑠𝑠60° + 25𝐴𝐴1/5 𝑐𝑐𝑐𝑐𝑐𝑐60° − 40𝐵𝐵3/5 𝑆𝑆𝑆𝑆𝑆𝑆12° − 5𝐵𝐵3/5 𝐶𝐶𝐶𝐶𝐶𝐶12° + 0 + 0 = 0
𝐴𝐴1� (25𝑐𝑐𝑐𝑐𝑐𝑐60° − 60𝑠𝑠𝑠𝑠𝑠𝑠60°) = 40𝐵𝐵3/5 𝑆𝑆𝑆𝑆𝑆𝑆12° + 5𝐵𝐵3/5 𝐶𝐶𝐶𝐶𝐶𝐶12°
5
𝐵𝐵3� (40𝑆𝑆𝑆𝑆𝑆𝑆12° + 5𝐶𝐶𝐶𝐶𝐶𝐶12°) = 𝐴𝐴1� (25𝑐𝑐𝑐𝑐𝑐𝑐60° − 60𝑠𝑠𝑠𝑠𝑠𝑠60°)
5 5
𝐴𝐴1� (25𝑐𝑐𝑐𝑐𝑐𝑐 60°−60𝑠𝑠𝑠𝑠𝑠𝑠 60°) 3 000(25𝑐𝑐𝑐𝑐𝑐𝑐 60°−60𝑠𝑠𝑠𝑠𝑠𝑠 60°)
𝐵𝐵3/5 = 5
AN: 𝐵𝐵3/5 = = 59 180,984
40𝑆𝑆𝑆𝑆𝑆𝑆 12°+5𝐶𝐶𝐶𝐶𝐶𝐶12° 40𝑆𝑆𝑆𝑆𝑆𝑆 12°+5𝐶𝐶𝐶𝐶𝐶𝐶12°
���������⃗
�𝑩𝑩 𝟑𝟑/𝟓𝟓 � = 𝟓𝟓𝟓𝟓 𝟏𝟏𝟏𝟏𝟏𝟏, 𝟗𝟗𝟗𝟗 𝑵𝑵
1’ donne : 𝐴𝐴1/5 𝑐𝑐𝑐𝑐𝑐𝑐60°−𝐵𝐵3/5 𝐶𝐶𝐶𝐶𝐶𝐶12° + 𝐶𝐶𝑥𝑥 = 0
𝐶𝐶𝑥𝑥 = 𝐵𝐵3/5 𝐶𝐶𝐶𝐶𝐶𝐶12° − 𝐴𝐴1/5 𝑐𝑐𝑐𝑐𝑐𝑐60°
𝐶𝐶𝑥𝑥 = 59 180,98 × 𝐶𝐶𝐶𝐶𝐶𝐶12° − 3 000 × 𝑐𝑐𝑐𝑐𝑐𝑐60° 𝑪𝑪𝒙𝒙 = 𝟓𝟓𝟓𝟓 𝟑𝟑𝟑𝟑𝟑𝟑, 𝟕𝟕𝟕𝟕
1’’ donne : 𝐴𝐴1/5 𝑠𝑠𝑠𝑠𝑠𝑠60° − 𝐵𝐵3/5 𝑆𝑆𝑆𝑆𝑆𝑆12° + 𝐶𝐶𝑦𝑦 = 0
𝐶𝐶𝑦𝑦 = 𝐵𝐵3/5 𝑆𝑆𝑆𝑆𝑆𝑆12° − 𝐴𝐴1/5 𝑠𝑠𝑠𝑠𝑠𝑠60°
𝐶𝐶𝑦𝑦 = 59 180,98 × 𝑆𝑆𝑆𝑆𝑆𝑆12° − 3 000 × 𝑠𝑠𝑠𝑠𝑠𝑠60° 𝑪𝑪𝒚𝒚 = 𝟗𝟗 𝟕𝟕𝟕𝟕𝟕𝟕, 𝟑𝟑𝟑𝟑
��������⃗
�𝑪𝑪 2
𝟐𝟐/𝟓𝟓 � = �𝐶𝐶𝑥𝑥 + 𝐶𝐶𝑦𝑦
2 ��������⃗
AN : �𝑪𝑪 2
𝟐𝟐/𝟓𝟓 � = �(56 387,73) + (9 706,34)
2
��������⃗
�𝑪𝑪 𝟐𝟐/𝟓𝟓 � = 𝟓𝟓𝟓𝟓 𝟐𝟐𝟐𝟐𝟐𝟐, 𝟎𝟎𝟎𝟎 𝑵𝑵
16
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 2 : RESOLUTION DE PROBLEME PAR LA METHODE GRAPHIQUE
A- SOLIDE SOUMIS A L’ACTION DE DEUX (2) FORCES
Pour un solide soumis à 2 forces, c’est un exercice trivial, aucun tracé n’est nécessaire
ici, nous savons déjà que quand un système matériel est soumis à deux forces, celles-ci ont
même support, de sens opposés et de même module.
1
FA FB
A B
et
FA FB
A B
Dans les deux cas ci-dessus pas besoin de tracés particuliers pour affirmer que �𝐹𝐹⃗𝐴𝐴 � = �𝐹𝐹⃗𝐵𝐵 �
B- SOLIDE SOUMIS A L’ACTION DE TROIS (3) OU QUATRE (4)
FORCES
La méthode générale c’est celle du dynamique et funiculaire, elle marche pour les cas
d’équilibre à trois (3) ou quatre (4) forces, concourantes ou parallèles.
Méthode simplifiée de résolution d’équilibre d’un solide soumis à trois forces
concourantes
Supposons l’isolement du solide (S) ci-dessous :
Direction de B 2/S
A B
A 1/S
(S)
C 3/S
Le tableau bilan des forces appliquées à (S) se présentera de la façon suivante :
Forces PA Direction Sens Intensité
��������⃗
𝑨𝑨𝟏𝟏/𝑺𝑺 A 3 500 N
��������⃗
𝑩𝑩𝟐𝟐/𝑺𝑺 B ? ?
��������⃗
𝑪𝑪𝟑𝟑/𝑺𝑺 C ? ? ?
17
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
La résolution graphique de ce problème consistera à déterminer les modules des actions en B
et C. Le dynamique aura trois cotés (triangle) à l’image du système qui a trois forces. On
prendra comme échelle : 1mm → 100 N. La démarche à suivre est la suivante :
Etape 1 : Déterminer la direction de la force ��������⃗
𝐶𝐶3/𝑆𝑆 ; elle passe par I, point de rencontre des
supports des deux autres connues en direction,
Etape 2 : Ecrire l’équation d’équilibre et numéroter le dynamique,
Etape 3 : Construire en respectant l’échelle le premier coté du dynamique qui est
correspondant à la force connue en module,
Etape 4 : Compléter le dynamique par les parallèles aux supports des deux autres forces.
Etape 5 : Mesurer les longueurs des cotés du dynamique correspondant aux forces inconnues
et les convertir en unités de forces.
Application
Etape 1 :
I
Direction de B 2/S
A
B
A 1/S
(S)
C 3/S
Etape 2 :
Equation d’équilibre : ��������⃗ ���������⃗
𝑨𝑨𝟏𝟏/𝑺𝑺 + 𝑩𝑩 ��������⃗ �⃗
𝟐𝟐/𝑺𝑺 + 𝑪𝑪𝟑𝟑/𝑺𝑺 = 𝟎𝟎
�����⃗
Numérotage du dynamique : 𝟎𝟎𝟎𝟎 + �������⃗
𝟏𝟏𝟏𝟏 + �����⃗
𝟐𝟐𝟐𝟐 = �𝟎𝟎⃗
18
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Etape 3 :
1mm → 100 N
1𝑚𝑚𝑚𝑚 ×3500𝑁𝑁
? → 3500 N ↔ ?= = 𝟑𝟑𝟑𝟑 𝒎𝒎𝒎𝒎
100𝑁𝑁
Donc on prendra 35 mm de la droite vers la gauche ou de haut en bas (voir sens de la force) pour le coté
���������⃗
correspondant à 𝐴𝐴 ����)
1/𝑆𝑆 (𝟎𝟎𝟎𝟎
I
Direction de B 2/S
A
B Coté 01 (35 mm) parallèle à A 1/S 0
A 1/S
(S)
1
C 3/S
Etape 4 :
I
Coté 20 parallèle à C3/S
Direction de B 2/S
A
B
Coté 01 (35 mm) parallèle à A 1/S 0
A 1/S
(S) 1
C
3/S
C
2 Coté 12 parallèle à B 2/S
Etape 5 :
1 mm → 100 N
37𝑚𝑚𝑚𝑚 ×100𝑁𝑁
37 mm → ? ↔ ��������⃗
Le coté 12 = �𝐵𝐵 2/𝑆𝑆 � = 𝟑𝟑 𝟕𝟕𝟕𝟕𝟕𝟕 𝑵𝑵
1 𝑚𝑚𝑚𝑚
��������⃗
�𝐵𝐵 2/3 � = 𝟑𝟑 𝟕𝟕𝟕𝟕𝟕𝟕 𝑵𝑵
1 mm → 100 N
�������⃗
�𝐶𝐶 3/𝑆𝑆 � = 𝟒𝟒 𝟔𝟔𝟔𝟔𝟔𝟔 𝑵𝑵
46𝑚𝑚𝑚𝑚 ×100𝑁𝑁
46 mm → ? ↔ �������⃗
Le coté 20 = �𝐶𝐶 3/𝑆𝑆 � = 𝟒𝟒 𝟔𝟔𝟔𝟔𝟔𝟔 𝑵𝑵
1 𝑚𝑚𝑚𝑚
19
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Méthode du dynamique et funiculaire
On utilise cette méthode quand on a à résoudre un problème d’équilibre d’un solide soumis à trois (3) ou quatre
(4) forces.
Considérons un problème typique comme celui de résoudre l’équilibre du solide (P) ci-
dessous :
J M Direction de M 4/S
J 1/P
L
K K 2/P
3/P
(P)
Les données sont résumées dans le tableau bilan des forces suivant :
Forces P. A. Direction Sens Intensité
�������⃗
𝑱𝑱𝟏𝟏/𝑷𝑷 J 3 500 N
���������⃗
𝑲𝑲𝟐𝟐/𝑷𝑷 K 5 000 N
��������⃗
𝑳𝑳 𝟑𝟑/𝑷𝑷
L ? ? ?
����������⃗
𝑴𝑴 𝟒𝟒/𝑷𝑷
M ? ?
On prendra l’échelle : 1 mm → 100 N
(P) est soumis à l’action de quatre (4) forces non parallèles : deux sont entièrement
connues, une est connue en direction et la dernière et entièrement inconnue. C’est le cas
d’utiliser la méthode du dynamique et funiculaire. La démarche à suivre est la suivante :
Etape 1 : Ecrire l’équation d’équilibre (mettre les forces inconnues aux extrémités de
l’équation; la force la plus inconnue doit se placer au début).
Etape 2 : Numéroter le dynamique (𝟎𝟎1 ����⃗ + 12
����⃗ + 23
����⃗ + 3𝟎𝟎
����⃗ = �𝟎𝟎⃗) sachant que le chiffre 0 se
retrouve au début et à la fin de part et d’autre de l’égalité.
Etape 3 : Numéroter le funiculaire �⃗
𝐹𝐹⃗1 + 𝐹𝐹⃗2 + 𝐹𝐹⃗3 + 𝐹𝐹⃗4 = 0
��������⃗
01 + �����⃗12 + �����⃗
23 + ����⃗
30 = �0⃗
0 1 2 3 0
20
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Etape 4 : Tracer en respectant l’échelle les cotés connus du dynamique (le dynamique c’est le
graphe constitué des parallèles aux forces, de longueurs respectivement proportionnelles aux
forces qu’elles représentent).
Etape 5 : Tracer le support de la force connue en direction en tenant compte de son numéro
sur le dynamique.
Etape 6 : Choisir un pole P (le pole est un point quelconque du plan généralement choisi à
droite du dynamique).
Etape 7 : Tracer les rayons polaires (les rayons polaires ce sont des lignes reliant les bouts
des cotés du dynamique au pole).
Etape 8 : Nommer chaque rayon polaire en indiquant le numéro du bout du dynamique d’où il
est issu. Exemple : Le rayon polaire issu du bout 1 du dynamique portera le nom 𝑅𝑅𝑅𝑅𝟏𝟏 ou
simplement 1’.
Etape 9 : Tracer le funiculaire (le funiculaire est le graphe constitué des parallèles aux rayons
polaires), le tracé se fait sur la pièce isolée en partant du point d’application de la force
complètement inconnue. Chaque fois respecter le principe suivant lequel le coté 𝒊𝒊 du
funiculaire est parallèle à 𝑹𝑹𝑹𝑹𝒊𝒊 .
Etape 10 : Fermer le funiculaire à son point de départ. Ce dernier trait est appelé ligne de
fermeture et matérialisé en trait interrompu (la ligne de fermeture correspond au rayon
polaire O soit 𝑹𝑹𝑹𝑹𝟎𝟎 ).
Etape 11: Tracer sur le dynamique la parallèle à la ligne de fermeture passant par le pole P
(Cette parallèle au rayon polaire 0 𝑹𝑹𝑹𝑹𝟎𝟎 coupe la direction de la force connue en direction
au dernier sommet du dynamique).
Etape 12 : Mesurer les longueurs des cotés du dynamique correspondant aux forces inconnues
et les convertir en unités de forces.
Application
Etapes 1,2&3 :
�𝑳𝑳⃗𝟑𝟑/𝑷𝑷 + 𝑱𝑱⃗𝟏𝟏/𝑷𝑷 + 𝑲𝑲
���⃗𝟐𝟐/𝑷𝑷 + 𝑴𝑴 �⃗
���⃗𝟒𝟒/𝑷𝑷 = 𝟎𝟎 : Equation d’équilibre
�����⃗
𝟎𝟎𝟎𝟎 + �������⃗
𝟏𝟏𝟏𝟏 + ������⃗
𝟐𝟐𝟐𝟐 �����⃗
+ 𝟑𝟑𝟑𝟑 = ���⃗
𝟎𝟎 : Numérotage du dynamique
0 1 2 3 0 : Numérotage du funiculaire
21
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Etape 4&5 :
1mm → 100 N
1𝑚𝑚𝑚𝑚 ×3500𝑁𝑁
? → 3500 N ↔ ?= = 𝟑𝟑𝟑𝟑 𝒎𝒎𝒎𝒎
100𝑁𝑁
Donc on prendra 35 mm pour le coté correspondant à ��������⃗ ����) du dynamique
𝐽𝐽1/𝑃𝑃 c’est-à-dire le coté (𝟏𝟏𝟏𝟏
1mm → 100 N
1𝑚𝑚𝑚𝑚 ×5000𝑁𝑁
? → 5000 N ↔ ?= = 𝟓𝟓𝟓𝟓 𝒎𝒎𝒎𝒎
100𝑁𝑁
Donc on prendra 50 mm pour le coté correspondant à ����������⃗ ����) du dynamique
𝐾𝐾2/𝑃𝑃 c’est-à-dire le coté (𝟐𝟐𝟐𝟐
J M Direction de M 4/S
J 1/P
L
K K 2/P
3/P
L Direction de M 4/S
2
3
(P)
Dynamique
Etapes 6,7&8 :
J M Direction de M 4/S
J L 1
1/P
K K 2/P
3/P
Rp1 P
L
Rp2
Rp3
(P)
2 Direction de M 4/S
3
Dynamique
Etapes 9&10 :
J M Direction de M 4/S
1
3 Rp1
L.D
P
J L
.F.(
1/P
K K 2/P
3/P
0)
2 Rp2
1 Rp3
L
2 Direction de M
3
4/S
(P)
Funiculaire
Dynamique
22
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Etapes 11 :
J M Direction de M 4/S
L.D
J L
.F.(
1
1/P
K K 2/P
3/P
2 Rp1
0)
P
1
L
Rp3
Rp0
Rp2
(P)
2
3
Funiculaire
Dynamique 0
Etapes 12 :
2 3
Dynamique
1 mm → 100 N
60𝑚𝑚𝑚𝑚 ×100𝑁𝑁
60 mm → ? ↔ ���������⃗
Le coté 30 = �𝑀𝑀 4/𝑃𝑃 � = 𝟔𝟔 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵
1 𝑚𝑚𝑚𝑚
1 mm → 100 N
113𝑚𝑚𝑚𝑚 ×100𝑁𝑁
113 mm → ? ↔ ��������⃗
Le coté 01 = �𝐿𝐿 3/𝑃𝑃 � = 𝟏𝟏𝟏𝟏𝟏𝟏 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵
1 𝑚𝑚𝑚𝑚
���������⃗
�𝑀𝑀 4/𝑃𝑃 � = 𝟔𝟔 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵
��������⃗
�𝐿𝐿 3/𝑃𝑃 � = 𝟏𝟏𝟏𝟏𝟏𝟏 𝟎𝟎𝟎𝟎𝟎𝟎 𝑵𝑵
23
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Méthode de CULMAN
Elle permet de résoudre le problème d’équilibre statique d’un solide soumis à
l’action de quatre (4) forces non parallèles dont une est entièrement connue, et les trois autres
seulement en direction.
La démarche à suivre est la suivante :
Etape 1 : Ecrire l’équation d’équilibre (regrouper les forces deux à deux comme elles peuvent
se couper le plus facilement sans surcharger le dessin, la force connue étant placée au début)
�����⃗).
Etape 2 : Numéroter le dynamique (la force connue portant le numéro 𝟎𝟎𝟎𝟎
Etape 3 : Matérialiser les points d’intersection des forces regroupées deux à deux sur la pièce
isolée et les nommer (généralement K1 pour l’intersection des deux premières et K2 pour les
deux autres).
Etape 4 :Tracer en trait interrompu, sur la pièce isolée la droite de CULMAN (elle passe par
K1 et K2).
Etape 5 : Tracer le coté ⃐�����
𝟎𝟎𝟎𝟎 du dynamique correspondant à la force entièrement connue en
tenant compte de l’échelle et de la direction.
Etape 6 : Tracer sur le dynamique la parallèle à la droite de CULMAN (elle passe par 0).
C’est virtuellement la droite (20) ou (02) bien que le point 2 ne soit pas encore déterminé.
Etape 7 : Tracer sur le dynamique la parallèle à la deuxième force en partant du bout 1
jusqu’à l’intersection avec la droite de CULMAN (cette intersection c’est le point 2).
Etape 8 : Tracer sur le dynamique à partir du point 2, la parallèle à la troisième force.
Etape 9 : Tracer sur le dynamique à partir du point 0, la parallèle à la quatrième force.
Etape 10 : Ces deux dernières parallèles se coupent au point 3.
Etape 11 : Mesurer les longueurs des cotés du dynamique correspondant aux forces inconnues
et les convertir en unités de forces.
Application :
Appliquons cette méthode à la résolution du problème d’équilibre de la pièce 7 suivante.
Les données sont résumées dans le tableau bilan suivant : L’échelle à adopter sera
1 mm → 50 daN.
24
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Direction de R3/7
P 1/7
Direction de S4/7
P S
Q
(7) Direction de Q2/7
Tableau bilan des forces appliquées à 7:
Forces P. A. Direction Sens Intensité
��������⃗
𝑷𝑷𝟏𝟏/𝟕𝟕 P 2150 daN
���������⃗
𝑸𝑸𝟐𝟐/𝟕𝟕 Q ? ?
��������⃗
𝑹𝑹𝟑𝟑/𝟕𝟕 R ? ?
��������⃗
𝑺𝑺 𝟒𝟒/𝟕𝟕
S ? ?
Etape 1&2:
��⃗𝟐𝟐/𝟕𝟕
𝑸𝑸 + ��⃗
𝑹𝑹𝟑𝟑/𝟕𝟕 + ��⃗
𝑷𝑷𝟏𝟏/𝟕𝟕 + �𝑺𝑺⃗𝟒𝟒/𝟕𝟕 �⃗
= 𝟎𝟎 : Equation d’équilibre
��⃗𝟏𝟏/𝟕𝟕
(𝑷𝑷 + ��⃗ ��⃗𝟑𝟑/𝟕𝟕
𝑸𝑸𝟐𝟐/𝟕𝟕 ) + (𝑹𝑹 + �𝑺𝑺⃗𝟒𝟒/𝟕𝟕 ) = ���⃗
𝟎𝟎 : Regroupement deux à deux
�����⃗
�𝟎𝟎𝟎𝟎 + �������⃗
𝟏𝟏𝟏𝟏� �����⃗
+ (𝟐𝟐𝟐𝟐 �����⃗ )
+ 𝟑𝟑𝟑𝟑 = ���⃗
𝟎𝟎 : Numérotage du dynamique
�����⃗
𝟎𝟎𝟎𝟎 + ������⃗
𝟐𝟐𝟐𝟐 = ���⃗
𝟎𝟎 : Représente la droite de CULMAN
↓ ↓
K1 et K2 : Noms des points d’intersection
Etape 3&4:
Dr
oi
te
de
C
UL
M
AN
K1
Direction de R3/7
P 1/7
Direction de S4/7
P S
Q
(7) Direction de Q2/7
K2
25
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Etape 5&6:
1mm → 50 daN
1𝑚𝑚𝑚𝑚 ×2150𝑁𝑁
? → 2150 daN ↔ ?= = 𝟒𝟒𝟒𝟒 𝒎𝒎𝒎𝒎
50𝑁𝑁
���������⃗
Donc on prendra 43 mm pour le coté correspondant à 𝑃𝑃
Dr ����) du dynamique
1/7 c’est-à-dire le coté (𝟎𝟎𝟎𝟎
Dr
oi
oi
te
te
de
de
CU
CU
LM
LM
AN
AN
K1
1
Direction de R3/7
P 1/7
Direction de S4/7
R
0
P S
Q
Dynamique
(7) Direction de Q2/7
K2
Etape 7:
Dr
Dr
oi
oi
te
te
de
de
C
C
UL
UL
M
M
AN
AN
K1
Direction de R3/7
P 1/7
1
Direction de S4/7
P S
Q 0
(7) Direction de Q2/7
K2 2
Dynamique
Etape 8&9:
Dr
oi
te
Dr
d
oi
eC
te
UL
de
CU
M
AN
LM
AN
K1
Direction de R3/7
P 1/7
Direction de S4/7
1
R
P S
Q 3
0
(7) Direction de Q2/7
K2
Dynamique 2
26
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Etape 10:
1
Dynamique
2
1 mm → 50 daN
93𝑚𝑚𝑚𝑚 ×50𝑑𝑑𝑑𝑑𝑑𝑑
93 mm → ? ↔ ��������⃗
Le coté 12 = �𝑄𝑄 2/7 � = 𝟒𝟒 𝟔𝟔𝟔𝟔𝟔𝟔 𝒅𝒅𝒅𝒅𝒅𝒅
1 𝑚𝑚𝑚𝑚
1 mm → 50 daN
81𝑚𝑚𝑚𝑚 ×50𝑑𝑑𝑑𝑑𝑑𝑑
81 mm → ? ↔ ��������⃗
Le coté 23 = �𝑅𝑅 3/7 � = 𝟒𝟒 𝟎𝟎𝟎𝟎𝟎𝟎 𝒅𝒅𝒅𝒅𝒅𝒅
1 𝑚𝑚𝑚𝑚
1 mm → 50 daN
6𝑚𝑚𝑚𝑚 ×50𝑑𝑑𝑑𝑑𝑑𝑑
6 mm → ? ↔ �������⃗
Le coté 30 = �𝑆𝑆 4/7 � = 𝟑𝟑𝟑𝟑𝟑𝟑 𝒅𝒅𝒅𝒅𝒅𝒅
1 𝑚𝑚𝑚𝑚
��������⃗
�𝑄𝑄 2/7 � = 𝟒𝟒 𝟔𝟔𝟔𝟔𝟔𝟔 𝒅𝒅𝒅𝒅𝒅𝒅
��������⃗
�𝑅𝑅 3/7 � = 𝟒𝟒 𝟎𝟎𝟎𝟎𝟎𝟎 𝒅𝒅𝒅𝒅𝒅𝒅
�������⃗
�𝑆𝑆 4/7 � = 𝟑𝟑𝟑𝟑𝟑𝟑 𝒅𝒅𝒅𝒅𝒅𝒅
27
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Q.C.M. STATIQUE: Répondez à ce questionnaire à choix multiple
1) Laquelle de ces actions mécaniques n'est pas une action mécanique de contact?
a- l'action du tournevis sur la vis. b- l'action du vent sur la voile.
c- l'action du stator d'un moteur sur son rotor.
2) L'isolement d'un solide consiste à :
a- recenser tous les solides qui ont le même mouvement.
b- Recenser toutes les actions mécaniques appliquées sur celui-ci.
c- mettre un solide en quarantaine pour maladie grave
3) La gravité terrestre s'exerce à partir du centre de la terre?
a- Vrai b- Faux
4) Combien d’actions mécaniques allez-vous écrire si vous isolez l'échelle ?
A Echelle
a- 1
b- 2 G
c- 3
C B
5) Dans le repère R (O, x, y, z), quel sera le résultat du produit vectoriel sur l'axe z :
a- -4 0 5
b- 4 2 Λ 0 𝑦𝑦⃗
c- -10 0 -2
6) La projection du vecteur F sur l'axe x donne: 𝐹𝐹⃗
a- −𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹 b- −𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹
b- 𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹 θ
7) La modélisation d’un système matériel consiste : 0 𝑥𝑥⃗
a- à s'amuser avec de la pâte à modeler
b- à passer de la réalité à un modèle mathématique. A Echelle
c- à passer d'un modèle mathématique à la réalité.
8) Quel sera le signe du moment en B de l'action
mécanique du poids de l'échelle? P G 𝑦𝑦⃗
a- Positif b- Négatif
b- le moment aura une valeur nulle O B 𝑥𝑥⃗
9) Quelle est la caractéristique du vecteur-force pour le poids d'un solide?
a- c'est un vecteur perpendiculaire à la surface de contact.
b- c'est un vecteur systématiquement vertical.
c- c'est un vecteur dont on connait toujours la norme
10) Laquelle de ces affirmations est la plus juste ?
La norme du moment d'une force par rapport à un point s'obtient en multipliant :
a- la force et la distance b- la force et la distance perpendiculaire à l'effort
c- la force et la distance au point d'application
11) L'unité du moment d'une force est le:
a- Newton (N) b- Joule (J) c- Newton.mètre (N.m)
12) Laquelle de ces affirmations est FAUSSE?
Une force :
a- est la même chose qu'un moment. b- peut provoquer un moment.
c- peut ne pas provoquer de moment
13) Si on a le vecteur F1/2 alors l'action mécanique réciproque F2/1 aura pour valeur
algébrique?
a- - F1/2 b- - F2/1 c- F1/2
14) L'action de la gravité terrestre est omniprésente dans l'univers?
28
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
a- Vrai b- Faux
15) En unité internationale, la norme d'un vecteur-force s'exprime en :
a- N (newton) b-daN (déca newton) c- m.N (mètre. newton)
16) Le moment d'une force par rapport au point d'application de cette force est toujours
nul.
a- Vrai b-Faux
17) Un solide réel est-il indéformable?
a- Oui b-Non
18) Le moment (non nul) d'une force tend toujours à faire tourner un solide autour
d'un point.
a- Vrai b-Faux
19) Un vecteur moment a les mêmes caractéristiques qu'un vecteur force à part l'unité
de la norme?
a- Vrai b- Faux
20) Un daN.m est égal à :
a- 1 N.m b- 10 N.m c- 0.1 N.m
21) Précisez laquelle de ces actions mécaniques est une action à distance :
a- action de l'eau sur la paroi d'un aquarium b- action du vent sur un cerf volant
c- action d'un aimant sur un morceau de fer
22) Quelle est la formule qui permet de calculer le poids d'un solide?
a- Poids = masse x gravité b- Poids = Force x gravité c-Poids = masse x vitesse
23) L'unité de l'accélération de la pesanteur est :
a- le kilogramme par seconde b- le kilomètre par heure c- le mètre par
seconde au carré
24) Le point d'application du vecteur associé au poids d'un solide est le point situé au
centre de gravité du solide.
a- Vrai b- Faux
25) Il existe deux types d'actions mécaniques : Les actions mécaniques de contact et les
actions mécaniques à distance.
a- Vrai b- Faux
26) La résultante de plusieurs vecteurs-force se trouve graphiquement en faisant :
a- la soustraction des vecteurs b- la multiplication des vecteurs
c- l'addition des vecteurs
27) Laquelle de ces affirmations est VRAIE?
a- Une action de contact peut ne pas être orientée vers la matière du solide isolé.
b- Une action de contact doit être orientée vers la matière du solide isolé.
29
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
CINEMATIQUE
La cinématique est la partie de la mécanique qui étudie les mouvements des systèmes
matériels sans tenir compte des causes qui les provoquent. On sait que ce sont les actions
mécaniques qui provoquent ces mouvements ; la cinématique ne tient pas compte des forces
et moments mais des paramètres du mouvement. Ces paramètres sont : le vecteur -position, le
vecteur –vitesse, le vecteur-accélération.
30
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 3 : GENERALITES SUR LA CINEMATIQUE
I) Trajectoire
La trajectoire d’un point est l’ensemble des positions successives occupées par ce point au
cours de son mouvement. Ainsi la trajectoire d’un point appartenant à un solide animé d’un
mouvement de translation rectiligne sera une droite alors que celle d’un point appartenant à
un solide animé d’un mouvement de rotation sera un cercle ou un arc de cercle.
II) Paramètre de position
Pour repérer la position d’un corps, on se sert de deux types de coordonnées
1) Coordonnées cartésiens
Considérons le plan muni d’un repère (O, i, j) sur lequel se déplace le point M.
𝑦𝑦⃗ M
������⃗
𝑂𝑂𝑂𝑂
𝑥𝑥⃗
O
Le vecteur-position ������⃗
𝑂𝑂𝑂𝑂 est définit par ������⃗
𝑂𝑂𝑂𝑂 = 𝑥𝑥𝑖𝑖⃗ + 𝑦𝑦𝑗𝑗⃗. Si on définit par x = f(t) et
y = g(t), alors on dit qu’on a définit les lois horaires en coordonnées cartésiens.
2) Abscisse curviligne
Si on veut repérer un mobile par son abscisse curviligne, cela suppose une connaissance
préalable de la trajectoire. On la muni alors d’un sens positif et d’une origine et sa position est
repérée par son abscisse curviligne.
s = OM
III) Paramètres d’évolution :
Comme paramètre d’évolution, on distingue : - la vitesse – l’accélération.
Les mouvements remarquables que peut effectuer un solide sont la translation et la
rotation.
A) MOUVEMENT DE TRANSLATION RECTILIGNE
Un solide 1 est animé d’un mouvement de translation rectiligne par rapport à un repère 0
(ou solide 0) lorsque deux vecteurs distincts du solide 1, conservent des directions parallèles
à deux vecteurs distincts de 0 au cours du mouvement de 1/0, et si quel que soit M ε 1, sa
trajectoire TMϵ1/0 est une droite.
Application : liaison glissière.
B) MOUVEMENT DE ROTATION AUTOUR D’UN AXE FIXE
Un solide 1 est animé d’un mouvement de rotation autour d’un axe fixe du solide 0
lorsque deux points distincts de 1 coïncident en permanence avec deux points de l’axe de 0.
31
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Application : liaison pivot d’axe �𝑂𝑂, ����⃗
𝑍𝑍0 �.
1) Caractéristiques du mouvement de rotation
• Tous les points décrivent des trajectoires circulaires par rapport à l’axe de
rotation�𝑂𝑂, ����⃗
𝑍𝑍0 �.
• Tous les points ont le même déplacement angulaire θ à l’instant t.
2) Vecteur vitesse angulaire et vecteur vitesse linéaire
a) Vecteur vitesse angulaire ou taux de rotation
Le vecteur vitesse angulaire 𝜔𝜔
�⃗1/0 traduit la variation instantanée de l’angle de rotation θ au
cours du mouvement de 1 / 0.
Norme :�𝜔𝜔�⃗1/0 � = 𝜔𝜔
Unité : radian par seconde rad/s
2πN 60ω
ω= N=
60 2π
Remarque : On parle souvent de fréquence de rotation N exprimée en tours par
minute tr/min.
b) Vecteur vitesse linéaire
Le vecteur-vitesse du point A ϵ1/0, ���������⃗
𝑉𝑉𝐴𝐴1/0 est tel que :
• Son point d’application est le point appartenant au solide étudié ;
• Sa direction est la droite tangente au cercle en A ou perpendiculaire au rayon OA ;
• Son sens est le sens de rotation ;
• Sa norme est égale à �𝑉𝑉���������⃗
𝐴𝐴1/0 � = 𝜔𝜔𝜔𝜔 en m/s.
32
1éres & Tles
VAε1 / 0
LE BORD DE MECANIQUE APPLIQUEE
c) Propriété des vecteurs vitesse
Les vecteurs-vitesse sont proportionnels à leur distance de l’axe de rotation.
���������⃗
𝑉𝑉𝐴𝐴1/0
���������⃗
�𝑉𝑉𝐴𝐴1/0 �
����������⃗
�𝑉𝑉 𝐵𝐵1/0 �
���������⃗
�𝑉𝑉 𝐶𝐶1/0 �
���������⃗
𝑉𝑉𝐶𝐶1/0 = = = 𝜔𝜔
𝑂𝑂𝑂𝑂 𝑂𝑂𝑂𝑂 𝑂𝑂𝑂𝑂
33
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
C- RELATION ENTRE LES GRANDEURS CINEMATIQUES (vecteur-position,
vecteur vitesse, vecteur- accélération)
Mouvement Rectiligne
Grandeurs Cinématiques Mouvement Rectiligne Uniformément Varié
Uniforme
Position du point 1 2
x = vt + x 0 x= at + v 0 t + x 0
en mètre 2
Mouvement de translation rectiligne
Vitesse du point x
v= cons tan te v = a.t + v0
en mètre / seconde t
Accélération du Point a = constante
en mètre / seconde2 a=0 (v
2 2
− v0 ) v − v0
a= ou a=
at = v’ 2( x − x 0 ) t
Calcul de la durée du mvt x v − v0
en seconde
t= t=
v a
Mouvement Circulaire
Grandeurs Cinématiques Mouvement Circulaire Uniformément Varié
Uniforme
Position du solide 1
θ = ωt + θ 0 θ= ω' t 2 + ω0 t + θ0
en radian 2
Mouvement de translation circulaire
Vitesse du solide θ
et Mouvement de rotation
ω= cons tan te ω = ω' t + ω0
en radian / seconde t
𝜔𝜔′ = constante
Accélération du solide
𝜔𝜔′ = 0 2
(ω − ω0 )
2
ω − ω0
en radian / seconde2 ω' = ou ω' =
2(θ − θ0 ) t
Calcul de la durée du mvt θ ω − ω0
en seconde
t= t=
ω ω'
34
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Exercice 1 :
Un vérin est utilisé pour déplacer une charge sur 50 cm. On suppose que le mouvement d’un
point M de la tige est une translation rectiligne uniforme. L’origine des espaces et des temps
est confondue.
a) Le temps de sortie de tige est 10s ; Déterminer la vitesse de sortie de tige.
b) La vitesse de rentrée de tige est de 0.2 m/s ; déterminer le temps de sortie de tige.
Exercice 2 :
Une voiture part d’un point A à l’instant t = 0. Elle se déplace à la vitesse uniforme VA = 54
km/h.
Une deuxième voiture part d’un autre point B situé à 1350 m en avant de A, à la même heure
que la première voiture et se déplace à la vitesse uniforme VB = 32.4 km/h.
1) Ecrire l’équation du mouvement des voitures dans les cas suivants :
a) Les deux voitures se déplacent dans le même sens
b) Les deux voitures se déplacent dans des sens opposés (La 1ère avance et la 2ème recule).
2) Calculer l’instant et le lieu de rencontre dans les deux cas.
Exercice 3 :
Le solide 1 est animé d’un
mouvement de rotation uniforme
autour de l’axe(0, 𝑍𝑍⃗0 ) par rapport au
bâti 0.
Le repère 𝑅𝑅𝑂𝑂 = (0, 𝑋𝑋⃗0 , 𝑌𝑌
�⃗0 , 𝑍𝑍⃗0 ) est lié
au bâti 0. OA = 100 mm et OB = 150
mm. La fréquence de rotation vaut
N1/0 = 400 tr/min.
Déterminez �𝑉𝑉 ���������⃗ ����������⃗
𝐴𝐴1/0 � et �𝑉𝑉𝐵𝐵1/0 �.
Exercice 4 :
Le solide 1 est animé d’un mouvement
de rotation uniforme autour de l’axe
(𝐴𝐴, 𝑍𝑍⃗0 ) par rapport au bâti 0.
Le repère 𝑅𝑅𝑂𝑂 = (0, 𝑋𝑋⃗0 , 𝑌𝑌 �⃗0 , 𝑍𝑍⃗0 ) est lié au
bâti 0.
AM = 50 mm. La fréquence de rotation
vaut N1/0 = 480tr/min.
����������⃗
1) Représentez 𝑉𝑉 𝑀𝑀1/0 arbitrairement.
2) Déterminez �𝑉𝑉 ����������⃗
𝑀𝑀1/0 �.
35
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Réponses :
Exercice 1 : a) V = 0,05 m/s b) 𝑡𝑡 = 2,5 𝑠𝑠
Exercice 2 : 1) a) 𝑥𝑥A = 15 t et 𝑥𝑥B = 9 t + 1350 b) 𝑥𝑥A = 15 t et 𝑥𝑥B = −9 t + 1350
2) Cas a) : 𝑡𝑡 = 225 𝑠𝑠 et 𝑃𝑃. 𝑟𝑟. = 3375𝑚𝑚 devant A.
Cas b) : 𝑡𝑡 = 56,25 𝑠𝑠 et 𝑃𝑃𝑃𝑃 = 843,75 𝑚𝑚 devant A.
Exercice 3 : ���������⃗
�𝑉𝑉𝐴𝐴1/0 � = 4,18 𝑚𝑚/𝑠𝑠 et ����������⃗
�𝑉𝑉 𝐵𝐵1/0 � = 6,28 𝑚𝑚/𝑠𝑠
Exercice 4 : 1) La perpendiculaire à (OM) passant par M, sens arbitraire.
����������⃗
2) �𝑉𝑉 𝑀𝑀1/0 � = 2,51 𝑚𝑚/𝑠𝑠
36
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 4 : LE MOUVEMENT PLAN
A- DEFINITION
Un solide est dit en mouvement plan lorsque tous les points appartenant à ce solide se
déplacent parallèlement à un plan fixe de référence.
Remarque : Une translation plane et une rotation d’axe sont des mouvements plans
particuliers.
Exemple : Considérons le système bielle manivelle ci-dessus.
Fig.1 : Système bielle manivelle
Les liaisons O, A et B sont des liaisons pivots d’axes perpendiculaires au plan de la figure.
Le mouvement du piston 3 par rapport au bâti 0, Mvt3/0, est une translation rectiligne de
direction OB.
Le mouvement de la manivelle 1 par rapport à 0, Mvt1/0, est une rotation d’axe O.
Le mouvement de la bielle 2, Mvt2/0, est un mouvement plan général.
Remarque : Le mouvement plan le plus général est la combinaison d’un mouvement de
translation rectiligne et d’un mouvement de rotation.
B- EQUIPROJECTIVITE DES VECTEURS VITESSES D’UN SOLIDE
B-1) Propriété de l’équiprojectivité
Soit deux points A et B d’un même solide 1 en mouvement plan par rapport à un
solide de référence 0.
37
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
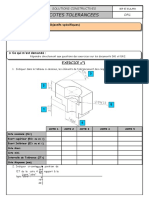
V B1/0
1
K
H B
y
A
V A1/0 z
x
O
Enoncé : La projection orthogonale du vecteur ���������⃗
𝑉𝑉𝐴𝐴1/0 sur la droite (AB) est égale à la
projection orthogonale du vecteur ����������⃗
𝑉𝑉𝐵𝐵1/0 sur la même droite (AB).
𝑉𝑉𝐴𝐴1/0 par �����⃗
Autrement dit, le produit scalaire de ���������⃗ 𝐴𝐴𝐴𝐴 est égal au produit scalaire de ����������⃗
𝑉𝑉𝐵𝐵1/0 par
�����⃗.
𝐴𝐴𝐴𝐴
Remarque : - Les points de projection H et K sont situés du même côté par rapport à leurs
points respectifs ;
- La propriété est applicable à tous les points, pris deux à deux du solide en
mouvement plan : on dit que le champ des vitesses est équiprojectif.
Exemple : Considérons le système bielle-manivelle ci-dessous.
OB=45mm AB=150mm
La vitesse de rotation de la manivelle 1 est de 100 rad/s.
Déterminer graphiquement la vitesse ����������⃗
𝑉𝑉𝐵𝐵2/0 .
���������⃗
On prendra �𝑉𝑉𝐴𝐴2/0 � = 𝜔𝜔1/0 . 𝐴𝐴𝐴𝐴 = 0,045 × 100 = 4,5 𝑚𝑚/𝑠𝑠
Choix de l’échelle : 10mm pour 1,5 m/s⇒ ���������⃗
𝑉𝑉𝐴𝐴2/0 (30 𝑚𝑚𝑚𝑚).
2
A
1
W1/ 0
0
50°
O B
3
38
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Note : Pour un solide en mouvement plan, il suffit de connaître complètement une vitesse et la
direction d’une autre pour déterminer toutes les vitesses de ce solide.
B-2) Détermination d’une vitesse par double équiprojectivité
Soient :
���������⃗
𝑉𝑉𝐴𝐴1/0 et ����������⃗
𝑉𝑉𝐵𝐵1/0 deux vitesses connues ;
���������⃗
𝑉𝑉𝐶𝐶1/0 une vitesse de direction, sens et d’intensité inconnus.
La détermination de ���������⃗
𝑉𝑉𝐶𝐶1/0 est possible par double équiprojectivité des deux vitesses
���������⃗ ����������⃗
𝑉𝑉𝐴𝐴1/0 et 𝑉𝑉 𝐵𝐵1/0 intégralement connues.
B V B1/0
V A1/0
S
C N
A M
R V C1/0
Méthode : -Tracer les vecteurs vitesses connues à une échelle choisie ;
- Construire M projection orthogonale de �����������⃗
𝑉𝑉𝐴𝐴3/0 sur AC;
- Construire N tel que 𝐶𝐶𝐶𝐶 = 𝐴𝐴𝐴𝐴, tracer la perpendiculaire à AC passant par N;
- Construire S projection orthogonale de ����������⃗
𝑉𝑉𝐵𝐵3/0 sur BC ;
- Construire R tel que𝐶𝐶𝐶𝐶 = 𝐵𝐵𝐵𝐵, tracer la perpendiculaire à BC passant par R ;
- déduire l’extrémité c du vecteur vitesse ���������⃗
𝑉𝑉𝐶𝐶1/0 , intersection de deux
perpendiculaires précédentes ;
���������⃗
- Tracer et mesurer 𝑉𝑉 ����⃗
𝐶𝐶3/0 = 𝐶𝐶𝐶𝐶 à l’échelle des vitesses.
����������⃗
Remarque : - Si C était aligné avec A et B, il aurait fallu déterminer la vitesse 𝑉𝑉 𝐷𝐷3/0 d’un
point D non aligné avec A et B.
39
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
- L’équiprojectivité est une méthode intéressante pour déterminer le module
d’une vitesse dont la direction est connue. S’il faut déterminer plusieurs vitesses ou une
vitesse dont la direction est connue, la méthode du Centre Instantané de Rotation (C.I.R) est
plus indiquée.
C) CENTRE INSTANTANE DE ROTATION
C-1) Définition
Pour tout solide 1 en mouvement plan par rapport à un solide de référence 0, il existe un
point I appelé centre instantané de rotation (C.I.R.), tel que la vitesse de ce point soit nulle à
���������⃗
l’instant t considéré : 𝑉𝑉 �⃗
𝐼𝐼1/0 = 0. Ce point est unique à l’instant t considéré.
Remarque : - Pour un mouvement de rotation, le CIR est confondu avec le centre de
rotation ;
- Pour un mouvement de translation, le CIR est situé à l’infini.
- La position géométrique du CIR varie au cours du temps, autrement dit, lorsque
le mécanisme change de position, le CIR change de position lui aussi.
C-2) Construction du C.I.R.
Le C.I.R., étant le centre de rotation, est situé à l’intersection des perpendiculaires aux
vecteurs-vitesses appartenant au solide en mouvement
V B1/0 V C1 / 0
C
ω1/0 I : Centre instantané de rotation
B VI = 0
V A1/0
I
y
A 1 x
z
O
V A1/0
V B1/0
V A1/0
C
A B
40
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Les perpendiculaires sont tracées à partir des points d’application des vecteurs-vitesses.
Puisque I est le Centre Instantané de Rotation, nous pouvons en déduire que:
V A1/0 = IA × ω1 / 0
V B1/0 = IB × ω1 / 0
En divisant membre à membre, chaque terme des équations, nous obtenons :
V A1/0 IA × ω1 / 0 IA IA
= = Soit Finalement : V A1/0 = × V B1/0
V B1/0 IB × ω1 / 0 IB IB
Grâce à cette relation, nous sommes capables de déterminer la norme d’une des
vitesses inconnues.
Exemple : Reprendre l’exemple du système bielle-manivelle ci-dessous et construire le C.I.R.
2
A
1
W1/ 0
0
50°
O B
3
Le C.I.R. est situé à l’intersection des perpendiculaires aux vecteurs-vitesses ���������⃗
𝑉𝑉𝐴𝐴3/0 et
����������⃗
𝑉𝑉𝐵𝐵3/0 menées depuis les points A et B.
Exercice 1 :
a) Le schéma ci-dessous est celui du système bielle-manivelle qu’on rencontre dans le
moteur à explosion.
Définir par calcul suivi de la méthode d’équiprojectivité la vitesse du piston si CA=10 mm et
N2/1 =3000 tr/mn ; (Echelle : 1m/s pour 1,5cm)
N2/1
x B
C 2
1 4
A 3
41
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
b) Le schéma ci-dessous est celui du mécanisme d’essuie glace.
Définir en passant par calculs et équiprojectivité la vitesse 𝜔𝜔4/1 du balai si AB=10mm ;
N2/1=3000tr/mn et EC=15mm. (Echelle : 1m/s pour 1,5cm pour les tracés)
D
y
4
2 B 3 C
A N2/1 x
1 E
1
Exercice 2 :
Le schéma ci-dessous est celui du système à coulisse d’une ponceuse vibrante,
Définir par calcul la vitesse 𝜔𝜔2/1 de la coulisse 2 si 𝐶𝐶𝐶𝐶 = 28,65 𝑚𝑚𝑚𝑚, 𝑁𝑁4/1 = 200 𝑡𝑡𝑡𝑡/𝑚𝑚𝑚𝑚 et
𝐴𝐴𝐴𝐴 = 102𝑚𝑚𝑚𝑚. (Echelle : 0,2m/s pour 1cm)
3
y B
2 4
C
N4/1
A x
1 1
Exercice 3 : Système à vérin, camion benne (Echelle : 1cm/s pour 1cm)
����������⃗
Calculer la vitesse 𝜔𝜔4/1 de la benne si CB=3m et �𝑉𝑉 𝐵𝐵3/1 � = 3 𝐶𝐶𝐶𝐶/𝑠𝑠
B C
y 4
3
2
x
A
1
42
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
RESISTANCE DES MATERIAUX
Chapitre 5 : GENERALITES SUR LA RESISTANCE DES MATERIAUX
Pour réaliser un projet de construction de machine, l’ingénieur ou le technicien doit
tenir compte des certains paramètres : le matériau à utiliser (ses caractéristiques
mécaniques), la résistance de la machine. Ces paramètres contribuent à la qualité de la
machine. C’est la Résistance Des Matériaux (RDM), née il ya 300 ans avec Galilée,
Hooke, Bernoulli et Coulomb, qui permet de faire ce travail.
A. NOTION DE POUTRE
On appelle poutre un solide engendré par une surface plane (S) dont le centre de
surface G décrit une courbe plane appelée ligne moyenne (AB).
Poutre Section droite
A G B
Fibre ou ligne
Fibre moyenne
- Les sections droites planes et perpendiculaires à la ligne moyenne doivent
rester constantes et varie progressivement (lentement et de façon continue) entre AB.
- La poutre est longue par rapport aux dimensions transversales (sections
droites).
-La poutre possède un plan de symétrie.
B. HYPOTHESES FONDAMENTALES
Pour faciliter l’étude, les hypothèses suivantes sont émises :
1) Les matériaux sont homogènes et isotropes :
Un corps est homogène lorsque tous les cristaux ou tous les grains de matières sont
identiques (même constitution, même structure).
Un corps est isotrope lorsque tous les points de sa structure ont les mêmes
caractéristiques mécaniques dans toutes les directions. Par exemple, le bois n’est pas
isotrope car il est plus résistant dans le sens des fibres que dans le sens perpendiculaire
aux fibres. Par contre, les métaux sont supposés homogènes parce que l’écart entre le
modèle et la réalité est faible.
43
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
2) Toutes les forces extérieures exercées sur la poutre sont contenues dans le plan
de symétrie.
3) Les sections planes et perpendiculaires à la ligne moyenne avant déformation
restent planes et perpendiculaires à la ligne moyenne après déformation. On suppose
qu’il n’y a pas gauchissement des sections : C’est l’hypothèse de Navier Bernoulli.
cas des petites déformations
Avant déformation
Après la déformation
Gauchissement des sections droites
C. EFFORTS INTERIEURS OU EFFORTS DE COHESION
Les efforts intérieurs ou de cohésion sont les efforts qui agissent à l’intérieur des
poutres et qui assurent l’équilibre ou la cohésion de la structure soumis à l’action des
forces extérieures. On utilise le PFS.
C-1 Principe de calcul
Généralement, on fait une coupure fictive entre deux forces, et dont les efforts de
cohésion sont tel que :
����⃗
- la résultante 𝑅𝑅 𝐺𝐺 est égale à l’opposé de la somme des forces extérieures appliquées
sur le tronçon de gauche ;
- le moment 𝑀𝑀�����⃗
𝐺𝐺 au centre de surface G est égal à l’opposé du moment résultant des
forces extérieures au point G.
F
RG
F A 1
F
G
MG
A
G B F F
MG
(S) F B
F G 2
RG
F
44
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
C-2 Composantes des efforts de cohésion
Soit le tronçon 1 de la poutre,
y
Ty
Mfy
A G Mt N x
Tz Mfz
�����⃗
𝑀𝑀 𝐺𝐺 = 𝑁𝑁𝑥𝑥
⃗ + 𝑇𝑇𝑦𝑦 𝑦𝑦⃗ + 𝑇𝑇𝑧𝑧 𝑧𝑧⃗
�
�����⃗
𝑀𝑀 𝐺𝐺 = 𝑀𝑀𝑡𝑡 𝑥𝑥
⃗ + 𝑀𝑀𝑓𝑓𝑓𝑓 𝑦𝑦⃗ + 𝑀𝑀𝑓𝑓𝑓𝑓 𝑧𝑧⃗
�⃗ : Effort normal, porté par la ligne moyenne x ;
Où 𝑁𝑁
�⃗ = 𝑇𝑇
𝑇𝑇 ���⃗𝑦𝑦 + ���⃗
𝑇𝑇𝑧𝑧 : Effort tranchant, perpendiculaire à la ligne moyenne ;
�����⃗
𝑀𝑀𝑡𝑡 : Moment ou couple de torsion, porté par la moyenne ;
�����⃗ �������⃗
𝑀𝑀𝑓𝑓 = 𝑀𝑀 �������⃗
𝑓𝑓𝑓𝑓 + 𝑀𝑀𝑓𝑓𝑓𝑓 : Moment fléchissant (ou de flexion), perpendiculaire à la ligne.
D. LES SOLLICITATIONS SIMPLES ET COMPOSEES
Si une des composantes N, T, Mt ou Mf existe, alors que toutes les autres sont
nulles, on dit que l’on a une sollicitation simple.
Si par contre deux composantes au moins sont non nulles, on dit que l’on a une
sollicitation composée.
45
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
D-1 Les sollicitations simples
D-2 Sollicitations composées
46
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 6 : TRACTION-COMPRESSION
Une poutre est sollicitée en traction si elle est soumise à deux forces directement
opposées appliquées aux centres des surfaces extrêmes et qui tendent à l’allonger.
Une poutre est sollicitée en compression si elle est soumise à deux forces directement
opposées appliquées aux centres des surfaces extrêmes et qui tendent à la raccorcir.
A- Résistance pratique à la TRACTION :
Pour qu'une pièce résiste aux efforts de traction (efforts qui tendent à allonger la pièce)
sans subir de déformation permanente, il faut pas que la contraainte normale ne dépasse
pas la limite élastique Re du matériau
En pratique la limite élastique d'un matériau peut varier de manière importante en fonction
de la température par exemple.
Pour que les calculs effectués restent sûrs malgré les incertitudes liées aux conditions
d'utilisation on va appliquer un coefficient de sécurité s compris entre 2 et 10. On détermine
ainsi une résistance pratique Rp.
𝑅𝑅𝑒𝑒
𝑅𝑅𝑝𝑝 =
𝑠𝑠
B- Condition de résistance à la TRACTION :
Exemple
La tige du vérin est :
- soit étirée
- soit comprimée,
sous l'effet de la force �𝑭𝑭⃗
47
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
La tige subit une contrainte de traction ou de compression σ (sigma) dans chacune de
ses sections droites.
Expression de la condition de resistance :
pour qu'une pièce résiste à une traction ou une compression, il faut que:
𝑭𝑭
𝝈𝝈 = ≤ 𝑹𝑹𝒑𝒑 avec : σ = contrainte de traction en Mpa
𝑺𝑺
F= force de traction (ou de compression) en N
S= aire totale sollicité à la traction en mm2
Rp = résistance pratique en MPa
Loi de Hooke
La loi de Hooke dans le cas de traction-compression s’écrit : 𝝈𝝈 = 𝑬𝑬𝑬𝑬
𝐹𝐹 ∆𝐿𝐿
Or 𝜎𝜎 = et 𝜀𝜀 =
𝑆𝑆 𝐿𝐿
𝐹𝐹𝐹𝐹
La relation de Hooke devient : ∆𝐿𝐿 =
𝐸𝐸𝐸𝐸
C- Déformation élastique :
Une pièce sollicitée à une traction ou à une compression subit une déformation
𝑭𝑭×𝑳𝑳
appelée ∆L. ∆𝑳𝑳 =
𝑬𝑬𝑬𝑬
avec : ∆L = Déformation en mm
F = Force de traction (ou de compression) en N
S = Aire totale sollicité à la traction en mm2
E = Module d'élasticité longitudinale en MPa
Quelques valeurs de E :
Acier : E = 200 000 MPa Fonte : E = 60 000 à 160 000 MPa
Cuivre : E = 120 000 MPa Aluminium : E = 70 000 MPa
48
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 7 : CISAILLEMENT SIMPLE
A- Résistance pratique au CISAILLEMENT
Un matériau réagit différemment selon qu'il est sollicité à une traction ou à un
cisaillement pour lequel il résiste beaucoup moins bien.
Exemple de pièce sollicitée au cisaillement :
1 2 On dit qu’une poutre est sollicitée au cisaillement
si elle est soumise à deux forces directement
opposées et qui tendent à la cisailler.
i) entre les pièces (1) et (2), l'axe
subit un cisaillement dû à la force T.
ii) l'axe subit une contrainte de cisaillement
dans la section cisaillée.
Section sollicitée au cisaillement
Dans la pratique, la résistance au cisaillement est comprise entre 0,5 et O,8 fois la résistance à
la traction.
Pour tenir compte de cette différence on définit une résistance pratique au cisaillement,
appelée «résistance de glissement» car les particules élémentaires de la matière glissent les
unes sur les autres sous l'effet de la sollicitation au cisaillement.
B- Condition de résistance au CISAILLEMENT :
La tige de l'exemple précédent subit une contrainte de cisaillement 𝝉𝝉 (tau) dans la
section sollicitée.
Expression de la condition de resistance : pour qu'une pièce résiste à un cisaillement, il
𝑻𝑻
faut que: 𝝉𝝉 = ≤ 𝑹𝑹𝒑𝒑𝒑𝒑
𝑺𝑺
avec : 𝝉𝝉 = (tau) Contrainte de cisaillement en Mpa
T = Force de cisaillement en N
S = Aire totale sollicité au cisaillement en mm2
Rpg = Résistance pratique au cisaillement en MPa
C- Exemple de pièces CISAILLEES :
2 sections sollicitées
49
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 8 : FLEXION SIMPLE
Au départ, avant chargement
y C
A la fin, après chargement
A. Expérience
Soit une poutre (Ρ) de section droite circulaire, de longueur AB = 2 m et de diamètre
d = 20 mm . Elle repose sur deux appuis A et B et est soumis à un chargement F = 200 N en son
milieu C.
OBSERVATION
→
Après application de la charge F , on remarque que :
Les fibres situées au-dessus de la ligne moyenne se raccourcissent (ou se compriment);
La ligne moyenne ou fibre neutre ne change pas de longueur ;
Les fibres situées en-dessous de la ligne moyenne s’allongent ;
∆l
Les allongements et les raccourcissements relatifs ou déformations ε= de la poutre, sont
l
∆l
proportionnels à la distance y de la fibre M considérée à la ligne moyenne tel que : = λ=
y ε
l
CONCLUSION
Comme conclusion, nous pouvons dire que :
50
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Les déformations étant proportionnelles à la distance y de la fibre M considérée à ligne
∆l
σ
moyenne, d’après la loi de HOOKE on aura = ε E
E= avec E le module d’YOUNG ;
l
Les déformations étant longitudinales (sur la longueur de la poutre) la poutre, subit des
contraintes normales en flexion (dans la direction de l’axe ox ) résultant du moment fléchissant Mf
uniquement ;
Toutes les fibres situées au-dessus de la ligne moyenne sont comprimées et supportent des
contraintes normales de compression (σ x est négatif ) ;
Toutes les fibres situées en-dessous de la ligne moyenne sont tendues et supportent des
contraintes normales de traction (σ x est positif ) .
NB : Les contraintes de cisaillement en flexion τ résultant des efforts tranchants sont généralement très inférieures devant
les contraintes normales en flexion σ x dans le cas d’une poutre soumise à la flexion. C’est pourquoi elles seront
négligées dans notre étude qui s’applique à une seule poutre soumise à la flexion.
Dans le cas de plusieurs poutres associées et même collés entre elle, une étude du dimensionnement en flexion,
tiendra compte des contraintes de cisaillement qui ici vont assurer le maintien de ces poutres, éviter le glissement entre les
poutres respectives et limiter les déformations.
B. REPARTITION DES CONTRAINTES
D’après cette répartition des contraintes sur une section droite de la poutre après la coupure fictive, on
montre que :
Mf σ M : Contrainte normale en M, en Mpa
σM =− ×y z
IG M f z : Moment fléchissant dans la section droite (S),
z en N.mm
y : Distance entre la ligne moyenne et le point
I : Moment quadratiqueM, en mm
z de la section droite
(S) par rapport à l’axe (G, z)
σM
C. CONTRAINTE NORMALE MAXIMALE
C’est la contrainte maximale sur une poutre soumise à la flexion avec ymax la distance
maximale entre la ligne moyenne et le point de la dernière fibre de la poutre. ymax est très souvent
d
égale à avec d , diamètre de la poutre d’après nos hypothèses de départ. On a donc :
2
51
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
M f z max M f z max
σ max =
− ⇔ σ max =
I Gz Iz
ymax ymax
D. CONDITION DE RESISTANCE
La condition de résistance est celle qui permettra de déterminer très souvent soit le
coefficient de sécurité de la poutre ( s ) , soit son diamètre minimal (d ) à adopter pour qu’elle
supporte la charge à venir. Elle s’exprime par :
σ Pe : Contrainte pratique à l’extension,
RPe en MPa
σ max ≤ σ Pe avec σ Pe = RP : Résistance pratique à l’extension,
s
e
en MPa
s : Coefficient de sécurité
Exercice :
Soit la poutre ( Ρ ) décrite dans l’expérience précédente, déterminons après avoir modélisé
les efforts agissants sur la poutre :
a) Les efforts aux appuis A et B ( FA et FB ) ;
b) Les équations des efforts tranchants ( Ty ) et des moments fléchissant ( M f z ) ;
c) Réaliser les diagrammes des efforts tranchants ( Ty ) et des moments fléchissant ( M f z ) ;
d) La contrainte normale maximale dans la section critique (σ max ) ;
52
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Correction :
∑ 𝐹𝐹⃗𝑒𝑒𝑒𝑒𝑒𝑒 = 0 �⃗ ����⃗
𝐹𝐹 ����⃗ ⃗ �⃗
𝐴𝐴 + 𝐹𝐹𝐵𝐵 + 𝐹𝐹 = 0 (𝟏𝟏)
a) � ↔ �
∑ 𝑚𝑚𝐴𝐴 (𝐹𝐹⃗𝑒𝑒𝑒𝑒𝑒𝑒 ) = 0 𝑚𝑚𝐴𝐴 �𝐹𝐹⃗𝐴𝐴 � + 𝑚𝑚𝐴𝐴 �𝐹𝐹⃗𝐵𝐵 � + 𝑚𝑚𝐴𝐴 �𝐹𝐹⃗ � (𝟐𝟐)
𝐹𝐹𝐴𝐴 + 𝐹𝐹𝐵𝐵 = 𝐹𝐹 𝐹𝐹
D’où � 1 → 𝐹𝐹𝐴𝐴 = 𝐹𝐹𝐵𝐵 = = 100 𝑁𝑁
− 𝑙𝑙𝑙𝑙 + 𝑙𝑙𝐹𝐹𝐵𝐵 = 0 2
2
𝑙𝑙
b) Pour le tronçon AC : 𝑂𝑂 ≤ 𝑥𝑥 <
2
𝐹𝐹𝐴𝐴 + 𝑇𝑇𝑦𝑦1 = 0 𝑇𝑇𝑦𝑦1 = −𝐹𝐹𝐴𝐴 = −100
On aura : � → �𝑀𝑀 = 𝐹𝐹 𝑥𝑥 = 100𝑥𝑥
−𝐹𝐹𝐴𝐴 𝑥𝑥 + 𝑀𝑀𝑓𝑓𝑓𝑓1 = 0 𝑓𝑓𝑓𝑓1 𝐴𝐴
𝑙𝑙
Pour le tronçon CB : ≤ 𝑥𝑥 < 𝑙𝑙
2
𝐹𝐹𝐴𝐴 − 𝐹𝐹 + 𝑇𝑇𝑦𝑦2 = 0 𝑇𝑇𝑦𝑦2 = 𝐹𝐹 − 𝐹𝐹𝐴𝐴 = −100
On aura : � → � 𝑀𝑀 = −100𝑥𝑥 + 200
−𝐹𝐹𝐴𝐴 𝑥𝑥 + 𝐹𝐹(𝑥𝑥 − 1) + 𝑀𝑀𝑓𝑓𝑓𝑓2 = 0 𝑓𝑓𝑓𝑓2
c) Tracé des diagrammes
𝑑𝑑
�𝑀𝑀𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 � 𝑦𝑦𝑚𝑚𝑚𝑚𝑚𝑚 =
2
d) |𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 | = 𝐼𝐼 𝐺𝐺𝐺𝐺 𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎 � 𝜋𝜋𝑑𝑑 4
|𝑦𝑦 𝑚𝑚𝑚𝑚𝑚𝑚 | 𝐼𝐼𝐺𝐺𝐺𝐺 =
64
�𝑀𝑀𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 � 10 5 20
En appliquant la formule on aura : |𝜎𝜎𝑚𝑚𝑚𝑚𝑚𝑚 | = 𝐼𝐼 𝐺𝐺𝐺𝐺 = 𝜋𝜋 (20 4 )
× = 127,324 𝑀𝑀𝑀𝑀𝑀𝑀
2
𝑑𝑑 64
� �
2
53
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 9 : TORSION
A) DEFINITION ET HYPOTHESES
1- Définition
Une poutre droite est sollicitée en torsion lorsque les actions aux deux extrémités se
réduisent à deux couples Mt et Mt’ égaux et opposés d’axe la ligne moyenne Lm.
2- Hypothèses
Le solide étudié est une poutre cylindrique droite, de section circulaire, pleine
ou creuse :
Le poids de la poutre est négligé :
La poutre est sollicitée en torsion simple c'est-à-dire qu’elle est soumise à ses
deux extrémités, à deux couples opposés Mt et Mt’ ayant pour support la ligne moyenne
Mt + ��������⃗
et tels que �����⃗ Mt’ = �0⃗
Les déformations seront toujours limitées au domaine élastique et la variation
des longueurs des fibres est considérée comme négligeable.
B) ESSAI DE TORSION
Le dispositif expérimental utilisé peut se schématiser par la figure ci-dessus. La poutre
(cylindre de révolution) est parfaitement encastrée à son extrémité gauche (la section S1 de
centre G1). On trace avant l’essai une génératrice M1 M2 du cylindre (parallèle à la ligne
moyenne). On applique à l’extrémité droite, (la section S2 de centre G2) un système de forces
extérieures pouvant se réduire à un seul vecteur moment Mt porté par l’axe G1 G2. En faisant
�����⃗� on mesure les déformations de la poutre, et on constate que :
croitre le module �𝑀𝑀𝑀𝑀
Toute section plane et normale à l’axe du cylindre reste plane et normale à cet axe :
54
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
La distance de deux sections droites données reste sensiblement constante ;
Le déplacement d’une section droite est uniquement une rotation d’angle α autour de
son axe, cette rotation est proportionnelle à la distance x par rapport à la section
d’encastrement.
�����⃗� croit, un système enregistreur non représenté permet de mesurer α, la
Lorsque �𝑀𝑀𝑀𝑀
�����⃗� rappelle celle de l’enregistrement de l’essai de
courbe donnant α en fonction de �𝑀𝑀𝑀𝑀
traction.
C) ANGLE UNITAIRE DE TORSION
Revenons sur la figure 6.3, pour une valeur donnée de 𝑀𝑀𝑀𝑀 (𝑀𝑀𝑀𝑀 <MA) l’angle de
torsion α de la section (S) par rapport à la section (S1) d’encastrement, ne caractérise pas la
déformation de torsion, puisqu’il est fonction de l’abscisse x du centre G de (S). Soit θ l’angle
dont tourne l’une par rapport à l’autre deux sections distantes de l’unité de longueur :
θ=
αx = α
x L 21
θ = angle unitaire de torsion (en rad/mm).
Soit α l’angle dont tourne S2 Par rapport à S1.
α = θ.L21
α en rad
θ en rad/mm
L21 en mm.
D) LOI DE HOOKE (relation contrainte déformation)
En torsion, et dans le cas des petites déformations, les contraintes dans la coupure (S)
se réduisent à des contraintes tangentielles ou de cisaillement τ à partir de la relation τ = Gγ
obtenu au chapitre cisaillement, on montre que la contrainte τM en un point M quelconque de
la coupure (S) est proportionnelle à la distance GM = ρ entre le point et la ligne moyenne.
55
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Relation entre Mt et θ
Mt = GθI0
Relation entre τ et Mt
τ : N.mm-2
𝑀𝑀𝑡𝑡 × 𝜌𝜌 Mt : N.mm
𝜏𝜏 = ρ : mm
𝐼𝐼0
I0 : mm4
E) CONDITION DE RESISTANCE
On exprime que la contrainte maximale en service reste inférieure ou égale à la
contrainte pratique de limite élastique au glissement(ou cisaillement). Remarquons que la
contrainte maximale dans une section droite s’obtient sur la surface extérieure de la poutre ρ =
R.
Souvent, des singularités de forme localisées entrainent des concentrations de
contrainte en leur voisinage. C’est en ces points que nous rencontrons la sollicitation la plus
défavorable. L’inéquation suivante résume la condition de résistance :
M tR ≤ = R g
τ= k
max t
I0
R pg
s
Avec : k t
= coefficient de concentration de contraintes
M t = Moment de torsion
R = rayon extérieur à la poutre
I 0 = moment quadratique polaire de la section
2
R g = contrainte limite élastique au glissement (N/mm )
R pg = contrainte pratique de limite élastique au glissement(ou cisaillement)
s = coefficient de sécurité.
56
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
NB : Les variations de section dues aux rainures de clavettes, épaulements, etc...,
provoquent localement des concentrations de contraintes. La contrainte théorique doit donc
être multipliée par le coefficient k de concentration de contraintes k t
de concentration de
contraintes qui dépend essentiellement des proportions et du type de variations de la section.
F) CONDITION DE RIGIDITE
Dans les applications où l’arbre de transmission tourne relativement vite (N>750tr/mn)
on doit limiter les déformations de torsion de l’arbre pour éviter les vibrations importantes
.Pour assurer une rigidité convenable de la transmission, on impose une limite à l’angle
unitaire de torsion :
= θ M = t 2M t ≤
θ lim
GI 0 Gπ R
4
• Pour les arbres de transmission : θ lim =0.250/m
• Pour les barres de torsion : θ lim = 10 à 150/m parfois plus.
Remarque : si les unités utilisées dans la relation sont le N et le mm, on doit exprimer θ lim en
rad/mm.
Exercices :
I) Un arbre cylindrique de diamètre d transmet un couple de moment M=50 N.m. Cet arbre
est en acier E36 pour lequel 𝜎𝜎𝑟𝑟 = 510 𝑀𝑀𝑀𝑀𝑀𝑀, 𝜎𝜎𝑒𝑒 = 325 𝑀𝑀𝑀𝑀𝑀𝑀 et 𝜏𝜏𝑒𝑒 = 175 𝑀𝑀𝑀𝑀𝑀𝑀 et 𝐺𝐺 = 8 ×
104 𝑀𝑀𝑀𝑀𝑀𝑀. On adopte un coefficient de sécurité 𝑠𝑠 = 3,5.
1) Déterminer le diamètre minimal de cet arbre à partir de la condition de résistance à la
torsion
2) Déterminer l’angle de déformation en degrés en deux sections distantes de 300 mm si
on choisit d= 18 mm pour le diamètre de l’arbre.
Réponses : 1) 𝑑𝑑 ≥ 17,1 𝑚𝑚𝑚𝑚 2) 𝛼𝛼 = 1,04 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑é
II) Un arbre cylindrique de diamètre d transmet un couple de moment M=100 N.m. Le type de
construction éxige une grande rigidité. On limite la déformation unitaire à 0,25 degré/m. Une
rainure de clavette provoque une concentration de contrainte de valeur k=3. On choisit pour le
matériau un acier A33 pour lequel : 𝜎𝜎𝑟𝑟 = 300 𝑀𝑀𝑀𝑀𝑀𝑀, 𝜎𝜎𝑒𝑒 = 155 𝑀𝑀𝑀𝑀𝑀𝑀, 𝜏𝜏𝑒𝑒 = 75 𝑀𝑀𝑀𝑀𝑀𝑀 et
𝐺𝐺 = 8 × 104 𝑀𝑀𝑀𝑀𝑀𝑀.
1) Déterminer le diamètre minimal de cet arbre.
2) Déterminer la contrainte tangentielle maximale pour d= 41 mm.
3) Quelle est la valeur du coefficient de sécurité dont on dispose.
Réponses :
1) 𝑑𝑑 ≥ 41 𝑚𝑚𝑚𝑚 2) |𝜏𝜏|𝑚𝑚𝑚𝑚𝑚𝑚 = 22,17 𝑀𝑀𝑀𝑀𝑀𝑀 3) 𝑠𝑠 = 3,4
57
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Chapitre 10 : SOLLICITATIONS COMPOSEES
A. INTRODUCTION
Dans les chapitres précédents nous avons étudié les contraintes et les déformations dans une
poutre soumise à une sollicitation simple telle que l’extension, la compression, le cisaillement
simple, la torsion, la flexion plane simple. Nous avons observé que les conditions théoriques
correspondant aux sollicitations simples ne se rencontrent qu’exceptionnellement. On admet qu’une
poutre est soumise à une sollicitation simple lorsqu’on peut négliger les autres sollicitations.
B. PRINCIPE DE SUPERPOSITION
Si la poutre est soumise à plusieurs sollicitations
simples qu’on ne peut pas négliger, on se trouve dans le
cas de sollicitations composées. Pour étudier les
sollicitations composées, on utilise le principe de
superposition :
Si une poutre est soumise à plusieurs sollicitations
simples, les vecteurs contraintes et les vecteurs
déformations qui en résultent sont respectivement les
sommes géométriques des vecteurs contraintes et des
vecteurs déformations dûs à chaque sollicitation simple
agissant séparément et telles que les contraintes
maximales résultantes restent inférieures à la limite
élastique.
C. DEFINITION
Une poutre de section circulaire constante dont la
ligne moyenne est droite et portée par (A, x ) est sollicitée en flexion-traction (compression)
lorsque :
►La flexion prise séparément est plane et simple ;
►La traction (compression) prise séparément est du même ordre de grandeur que M f max i
.
D. ETUDE DES CONTRAINTES
Soit une poutre 1 (figure 1) dont on considère une section droite (S) de centre de surface G.
𝑅𝑅�⃗
La résultante en G du torseur des forces de cohésion {𝜏𝜏𝑐𝑐𝑐𝑐ℎ } = �𝑀𝑀
������⃗�, a donc les composantes
𝐺𝐺
suivantes dans le repère 𝐺𝐺(𝑥𝑥⃗, 𝑦𝑦⃗, 𝑧𝑧⃗)
58
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
Figure 1
𝑁𝑁≠0 𝑀𝑀 =0
𝑅𝑅�⃗ �𝑇𝑇 𝑦𝑦 ≠0 ; �����⃗
𝑀𝑀𝐺𝐺 �𝑀𝑀 𝑓𝑓𝑓𝑓𝑡𝑡 =0
𝑇𝑇 𝑧𝑧 =0 𝑀𝑀𝑀𝑀 𝑧𝑧 ≠0
Si N> 0 on a une traction
Si N< 0 on a une compression
La composante M fz ≠ 0 provoque une sollicitation de flexion plane simple. Nous avons vu que
������⃗
cette sollicitation fait intervenir des contraintes normales σ 2 dont la forme est proportionnelle à
𝑀𝑀𝑓𝑓𝑓𝑓
l’ordonnée y du point considéré et telles que 𝜎𝜎2 =
𝐼𝐼𝐺𝐺𝐺𝐺
𝑦𝑦
Figure 2
La composante Ty provoque dans la section droite (S) une contrainte tangentielle τxy
dont la valeur peut être négligée devant les autres contraintes. Dans le cas de la figure 2 :
𝑇𝑇𝑦𝑦 𝑊𝑊𝐺𝐺𝐺𝐺 3�𝑇𝑇𝑦𝑦 �
𝜏𝜏𝑥𝑥𝑥𝑥 = 𝜏𝜏𝑀𝑀 = −
𝑏𝑏𝐼𝐼𝐺𝐺𝐺𝐺
𝑦𝑦 et �𝜏𝜏𝑥𝑥𝑥𝑥 �
𝑚𝑚𝑚𝑚𝑚𝑚
=
2𝑆𝑆
(𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 𝑦𝑦 = 0)
● Dans la zone comprimée, au point M :
σ=
Mx σ 1M + σ 2 M ;
𝜏𝜏𝑀𝑀𝑀𝑀𝑀𝑀 = 0 d’où
σ max
=
N M fz
− y
(1)
S I G, z M ( )
59
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
● Dans la zone comprimée, au point N:
σ=
Nx σ 1N + σ 2 N ; τ Nxy = 0 et σ =
N M fz
− y
(2)
max
( )
S I G, z N
E. CONDITION DE RESISTANCE
On note : σ p = σse
Avec :
σ e = Contrainte normale limite élastique ;
S = coefficient de sécurité ;
σ p = Contrainte normale limite pratique.
La condition limite pour les contraintes normales s’écrit alors :
σ max ≤ σ p
Exercice 1:
La figure 8.13 représente une poutre 1 en liaison encastrement en B avec le support 2.
Figure 3
Le plan (𝐴𝐴, 𝑥𝑥⃗, 𝑦𝑦⃗) est un plan de symétrie pour la poutre 1 et pour les forces qui lui sont
appliquées. (A, x) est porté par la ligne moyenne de 1.
���������⃗
𝐴𝐴
L’action de 3 sur 1 est modélisable en A par :�𝜏𝜏3/1 � = � 3/1
�⃗
� tel que
0
��������⃗
𝐴𝐴 3/1 = −5000𝑥𝑥
⃗ + 2000𝑦𝑦⃗
L’action de 4 sur 1 est modélisable par une densité linéique de force constante
entre A et B et telle que ����������⃗
𝑑𝑑𝑑𝑑4/1 = −𝑝𝑝𝑝𝑝𝑝𝑝𝑦𝑦⃗ avec p = 3 N/mm
La poutre a une section rectangulaire de largeur b = 30 mm et de hauteur h = 60 mm. Elle est en
acier pour lequel E = 2.105 Mpa et σe = 380 Mpa. On considère une section droite (S) de centre de
surface G telle que �����⃗
𝐴𝐴𝐴𝐴 = 𝑥𝑥𝑥𝑥⃗
1) Déterminer les éléments de réduction en B de l’action mécanique de 2 sur 1.
2) Déterminer les composantes dans(𝐺𝐺, 𝑥𝑥⃗, 𝑦𝑦⃗, 𝑧𝑧) des éléments de réduction en G du torseur des
forces de cohésion. En déduire le type de sollicitation auquel est soumis la poutre 1.
60
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
3) Déterminer les équations et les diagrammes de l’effort normal N, de l’effort tranchant Ty et du
moment de flexion Mfz le long de la poutre AB.
4) Déterminer la répartition des contraintes normales dans la section la plus sollicitée et en
déduire la contrainte normale maximale dans la zone tendue et dans la zone comprimée.
Déterminer l’ordonnée 𝑦𝑦 de la fibre neutre.
Solution :
1) L’équilibre de 1 entraine que :∑�𝜏𝜏𝐹𝐹𝐹𝐹𝐹𝐹𝐹𝐹 /1 � = �0⃗.
La réduction en B permet d’écrire :
𝐴𝐴3/1 + ∑01 ����������⃗
𝑅𝑅�⃗(𝑒𝑒𝑒𝑒𝑒𝑒 /1) = ��������⃗ 𝐵𝐵2/1 = �0⃗
𝑑𝑑𝑑𝑑4/1 + ��������⃗
��⃗𝐵𝐵(𝑒𝑒𝑒𝑒𝑒𝑒 /1) = ��������⃗
𝑀𝑀 𝑀𝑀𝐵𝐵 (����������⃗
𝐴𝐴3/1 ) + ∑01 ��������⃗
𝑀𝑀𝐵𝐵 (������������⃗
𝑑𝑑𝑑𝑑4/1 ) + ��������⃗
𝑀𝑀𝐵𝐵 (����������⃗
𝐵𝐵2/1 ) = �0⃗
On obtient alors : ��������⃗ ������������������⃗
𝐵𝐵2/1 = 5000𝑥𝑥⃗ + 4000𝑦𝑦⃗ ; 𝑀𝑀 6
𝐵𝐵 (2/1) = −2 × 10 𝑧𝑧⃗
2) Dans la zone AB pour laquelle 0 ≤ x ≤ 2000, on considère la section droite (S) de
centre de surface G telle que �����⃗
𝐴𝐴𝐴𝐴 = 𝑥𝑥𝑥𝑥⃗. Si on considère le tronçon à gauche de (S), on
𝑅𝑅 �⃗
peut écrire que :{𝜏𝜏𝑐𝑐𝑐𝑐 ℎ } = �𝑀𝑀
������⃗�
𝐺𝐺 𝐺𝐺
���������⃗
𝑅𝑅�⃗=−𝐴𝐴 𝑙𝑙 ������������⃗ ���������⃗
3/1 −∑0 𝑑𝑑𝑑𝑑 4/1 +𝐵𝐵 2/1
Avec :� 𝑥𝑥 ������⃗ ������������⃗
������⃗
𝑀𝑀𝐺𝐺 =−𝑀𝑀 ������⃗
𝐺𝐺 ���������⃗
(𝐴𝐴 3/1 )−∑ 0 𝐺𝐺 (𝑑𝑑𝑑𝑑 4/1 )
𝑀𝑀
�⃗ �𝑇𝑇𝑁𝑁=5000
La première relation s’écrit :𝑅𝑅�⃗ = 5000𝑥𝑥⃗ − 2000𝑦𝑦⃗ + 3𝑥𝑥𝑦𝑦⃗ d’où 𝑅𝑅 𝑦𝑦 =−2000 +3𝑥𝑥
𝑇𝑇 𝑧𝑧 =0
𝑀𝑀𝑡𝑡 =0
�����⃗
La deuxième relation s’écrit :𝑀𝑀 ��⃗
𝐺𝐺 = 2000𝑥𝑥𝑧𝑧⃗ − 1.5𝑥𝑥 𝑧𝑧⃗ d’où 𝑀𝑀𝐺𝐺 � 𝑀𝑀 𝑓𝑓𝑓𝑓 =0
2
𝑀𝑀 𝑓𝑓𝑓𝑓 =200 𝑥𝑥 −1.5𝑥𝑥 2
Il en résulte que la poutre 1 est soumise entre A et B à une sollicitation composée de flexion
plane simple et de traction.
3) Les résultats de la question 2 permettent d’écrire :
Effort normal : N(x) = 5000. D’où le diagramme figure 8.14a.
Effort tranchant : Ty(x) = -2000 +3x
En A : x = 0 ; Ty = - 2000
En B : x = L ; Ty = 4000.
En C : x =L/2 ; Ty = 0.
61
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
D’où le diagramme figure 8.14b.
Moment de flexion : Mfz(x) = 2000x -1.5x2. D’où le diagramme figure 8.14c.
4) L’étude des diagrammes précédents nous montre que la section la plus sollicitée est en
B. Cette section est sollicitée à la flexion plane simple et à la traction, d’où :
𝑵𝑵
Contrainte normale due à N : 𝝈𝝈𝟏𝟏 = ;
𝑺𝑺
𝑴𝑴𝒇𝒇𝒇𝒇
Contrainte normale due à Mfz : 𝝈𝝈𝟐𝟐 = − 𝒚𝒚 ;
�⃗)
𝑰𝑰(𝑮𝑮,𝒛𝒛
𝑵𝑵 𝑴𝑴𝒇𝒇𝒇𝒇
Contrainte normale due à la flexion et à la traction :𝝈𝝈𝒙𝒙 = − 𝒚𝒚 .
𝑺𝑺 �⃗)
𝑰𝑰(𝑮𝑮,𝒛𝒛
Dans la section droite en B :
N = 5000(N) ; S = b.h = 1800(mm) ; Mfz = - 2 x106 (N .mm).
𝒃𝒃𝒉𝒉𝟑𝟑
𝑰𝑰(𝑮𝑮, �⃗)
𝒛𝒛 = = 𝟓𝟓𝟓𝟓 × 𝟏𝟏𝟏𝟏𝟒𝟒 (𝑚𝑚𝑚𝑚4 )
𝟏𝟏𝟏𝟏
D’où 𝝈𝝈𝒙𝒙 = 𝟐𝟐. 𝟕𝟕𝟕𝟕 + 𝟑𝟑. 𝟕𝟕 𝒚𝒚 (∗)
Pour 𝑦𝑦 = 30 𝜎𝜎𝑀𝑀 = 113.78
Pour 𝑦𝑦 = − 30 𝜎𝜎 𝑁𝑁 = − 108.22
Dans la zone tendue :|𝜎𝜎𝑀𝑀 |𝑀𝑀𝑀𝑀𝑀𝑀 = 113.78 𝑀𝑀𝑀𝑀𝑀𝑀
Dans la zone comprimée : |𝜎𝜎𝑁𝑁 |𝑀𝑀𝑀𝑀𝑀𝑀 = 108.22 𝑀𝑀𝑀𝑀𝑀𝑀
62
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
La figure 8.15 donne les diagrammes de répartition des contraintes normales.
Dans la relation (∗) ci-dessus pour σx = 0 on obtient l’ordonnée 𝑦𝑦 du plan neutre.
Exercice 2 :
La figure 8.26 représente la modélisation d’un levier 1 de section rectangulaire.
On note 𝑅𝑅 = (𝐴𝐴, 𝑥𝑥⃗, 𝑦𝑦⃗, 𝑧𝑧⃗) . L’axe (𝐴𝐴, 𝑥𝑥⃗) est porté par la ligne moyenne du levier 1. Le plan (𝐴𝐴, 𝑥𝑥⃗, 𝑦𝑦⃗)
est un plan de symétrie pour le levier 1 et pour les forces extérieures qui lui sont appliquées.
Le levier 1 est soumis aux actions mécaniques suivantes :
���������⃗
𝐴𝐴
L’action de 2 sur 1 est modélisable en A par : �𝜏𝜏2/1 � = � 2/1
�⃗
� tel que
0
��������⃗
𝐴𝐴 3/1 = −900𝑥𝑥
⃗ − 800𝑦𝑦⃗
���������⃗
𝐵𝐵3/1
L’action de 3 sur 1 est modélisable en B par : �𝜏𝜏3/1 � = � �⃗
� tel que
0
��������⃗
𝐵𝐵 3/1 = 1200𝑦𝑦
⃗
���������⃗
𝐶𝐶4/1
- L’action de 4 sur 1 est modélisable en C par : �𝜏𝜏4/1 � = � �0⃗
� tel que
��������⃗
𝐶𝐶 4/1 = 900𝑥𝑥
⃗ − 400𝑦𝑦⃗
Questions :
1- Déterminer les équations de l’effort normal N, de l’effort tranchant TY , du moment de
flexion Mfz le long du levier 1 et construire les diagrammes correspondants.
En déduire la valeur de N Max , TY , M et la position des sections droites
Max fz Max
correspondantes.
63
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
2- Déterminer la répartition des contraintes normales dans la section droite (S) la plus
sollicitée et construire les diagrammes correspondants.
En déduire la contrainte normale maximale dans la zone tendue et dans la zone comprimée.
3- Déterminer la contrainte tangentielle maximale dans la section droite B-B.
Réponses :
1- N Max = 990(N) entre A et C
TY Max = 800(N) entre A et B
M
fz Max
= 32 x 103(N.mm)
2- La section B-B est la plus sollicitée.
𝝈𝝈 = 𝟏𝟏𝟏𝟏 + 𝟏𝟏𝟏𝟏. 𝟏𝟏𝟏𝟏𝟏𝟏𝒚𝒚
Pour 𝑦𝑦 = 8 : 𝜎𝜎 = 144(𝑀𝑀𝑀𝑀𝑀𝑀), zone tendue ;
Pour y = - 8 : 𝜎𝜎 = − 114(𝑀𝑀𝑀𝑀𝑀𝑀), zone comprimée.
3- τ xy = 11.63MPa .
max
64
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
DYNAMIQUE
La dynamique est la partie de la mécanique qui s’occupe de l’aspect énergétique. Elle
s’emploie à établir la relation qui existe entre les forces et le déplacement autrement dit la
relation entre la statique et la cinématique pour aboutir ainsi aux notions de travail, puissance
et énergie.
Chapitre 11 : TRAVAIL ET PUISSANCE
GENERALITES
Une force qui déplace un solide, produit un travail ; le travail est une quantité mesurable son
unité est le « joule », le symbole du joule est J.
La puissance est l’expression du travail qui tient compte du temps mis pour déplacer le
solide ; son unité est le « watt », le symbole du watt est W.
A- TRAVAIL
1- Travail d’une force constante au cours d’un déplacement rectiligne de son point
d’application
Définition
Le travail d’une force constante F au cours d’un déplacement rectiligne AA’ de son
point d’application est égal au produit scalaire des vecteurs force et déplacement.
𝐹𝐹⃗ �������⃗′ = 𝑭𝑭. 𝑨𝑨𝑨𝑨′ 𝐜𝐜𝐜𝐜𝐜𝐜(𝑭𝑭.�
���⃗ 𝑨𝑨𝑨𝑨
𝑾𝑾𝑨𝑨𝑨𝑨′ = 𝑭𝑭. 𝑨𝑨. 𝑨𝑨)
W : Travail en joule (J)
F : Force en newton (N)
AA’ : distance en mètres (m)
𝐴𝐴 𝐴𝐴′ 𝐹𝐹⃗
Remarques
� ������⃗� = 𝜋𝜋 � ������⃗� = 0, W = 0
→ Si�𝐹𝐹⃗ ; 𝐴𝐴𝐴𝐴′ , cos �𝐹𝐹⃗ ; 𝐴𝐴𝐴𝐴′
2
𝐴𝐴′
𝐴𝐴 𝐹𝐹⃗
� ������⃗� < 𝜋𝜋 , cos �𝐹𝐹⃗� ������⃗� > 0, W > 0
→ Si 0 ≤ �𝐹𝐹⃗ ; 𝐴𝐴𝐴𝐴′ ; 𝐴𝐴𝐴𝐴′
2
Le travail est dit moteur
𝐴𝐴′ 𝐴𝐴
65
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
𝜋𝜋 � ������⃗� ≤𝝅𝝅, Cos �𝐹𝐹⃗� ������⃗� < 0; W < 0
→ Si < �𝐹𝐹⃗ ; 𝐴𝐴𝐴𝐴′ ; 𝐴𝐴𝐴𝐴′
2
Le travail est dit résistant
2- Le travail d’une force constante au cours d’un déplacement quelconque
Le centre de gravité d’un objet qui va d’un point A à un point A’, en suivant le trajet (c), le
poids de l’objet reste constant durant le déplacement
A
�⃗
𝐏𝐏
A
�
𝑾𝑾𝑨𝑨𝑨𝑨′ �(�������⃗ 𝑨𝑨𝑨𝑨′ 𝐜𝐜𝐜𝐜𝐜𝐜 �𝑃𝑃�⃗; ������⃗
��⃗. �������⃗
𝑷𝑷) = 𝑷𝑷 𝐴𝐴𝐴𝐴′� � = 𝑷𝑷. 𝑨𝑨𝑨𝑨 = 𝑷𝑷. 𝒉𝒉
N.B : le travail du poids ne dépend pas du chemin suivi, mais de la différence d’altitude entre A et A’.
3- Le travail d’un système de forces
C’est la somme algébrique du travail de chacune des forces pendant le temps considéré.
Si �F⃗ = �F⃗X + �F⃗y + �F⃗z alors W1−2 �F
�⃗ � = FX . x1 x2 + Fy . y1 y2 + Fz . z1 z2
4- Travail d’un moment constant appliquée à un solide en mouvement de rotation autour d’un axe
����⃗ = 𝐹𝐹. 𝐴𝐴𝐴𝐴′ = 𝐹𝐹. 𝑂𝑂𝑂𝑂. 𝜃𝜃�
𝑊𝑊𝐴𝐴𝐴𝐴′ �𝐹𝐹)
A’ 𝐹𝐹⃗
θ ����⃗
Or F.OA = 𝓜𝓜∆ (𝐹𝐹)
A
(∆) ����⃗ = 𝓜𝓜∆ (𝐹𝐹)
On a : 𝑊𝑊𝐴𝐴𝐴𝐴′ (𝐹𝐹) ����⃗. 𝜃𝜃
Théorème :
- Le travail d’une force de moment constant par rapport à l’axe de rotation, au cours
d’une rotation d’un angle 𝜽𝜽, est égal à : ����⃗ = 𝓜𝓜∆ (𝑭𝑭)
𝑾𝑾𝑨𝑨𝑨𝑨′ (𝑭𝑭) ����⃗. 𝜽𝜽
66
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
5- Travail d’un couple
- Le travail d’un couple constant 𝐂𝐂 au cours d’une rotation d’un angle 𝜽𝜽, est égal à
W en joule (J)
W(C) = 𝐂𝐂 . 𝜽𝜽 𝐂𝐂 en newton mètre (N.m)
𝜽𝜽 en radian (rad)
𝐍𝐍. 𝐁𝐁: lorsque le travail moteur est en valeur absolue égal au travail résistant on dit
qu’il y a conservation du travail. |𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊 tan 𝑡𝑡| = |𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊𝑊|
B- PUISSANCE
La puissance définie la quantité de travail effectué par unité de temps ou le débit
d’énergie
1-Puissance moyenne
La puissance moyenne d’une force F dans l’intervalle de temps t, t + ∆𝑡𝑡 et mesurée par
le quotient :
𝑃𝑃 (𝑊𝑊 ) 1 𝑗𝑗𝑗𝑗𝑗𝑗𝑗𝑗𝑗𝑗
Pm =
∆𝑊𝑊
� ∆𝑤𝑤 (𝑗𝑗) 1 cheval (1CV) = 736 W; 1watt = = 𝐽𝐽/𝑠𝑠
∆𝑡𝑡 1𝑠𝑠
∆𝑡𝑡 (𝑠𝑠)
2-Puissance développée par une force
Puissance développée par une force 𝐹𝐹⃗ est telle que
�⃗ = F.V.cosθ
P= 𝐹𝐹⃗ . 𝑉𝑉
si P > 0 ⇔O ≤ θ < 90 puissance motrice
si P < 0 ⇔ 90 < θ ≤ 180 puissance résistante
3-La puissance développée par un couple
La puissance développée par un couple C est telle que P = Cω
C en N .m ; ω en rad/s ; P en Watt
67
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
C- Notion de rendement
𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟 é𝑒𝑒
Le rendement η d’une machine en de l’énergie est : 𝜂𝜂 = ≤1
𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓
𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 −𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝 𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝𝑝
𝜂𝜂 = =1−
𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓 𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸𝐸 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓
𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃 𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢𝑢
On peut aussi exprimer le rendement en fonction de la puissance : 𝜂𝜂 =
𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃𝑃 𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓
Exercice 1 :
Un corps de m = 1 200 kg monte sur une pente de 15 % d’un mouvement rectiligne
�⃗ du point A au point B (voir figure). Le
uniforme par l’intermédiaire d’une force motrice 𝑭𝑭
contact entre le plan de déplacement et corps (S) se fait adhérence.
Déterminer :
1- La réaction du plan incliné ;
2- La force développée par le moteur ;
3- Le travail de chacun de ces forces pour un déplacement rectiligne de 1 200m
𝐹𝐹⃗
𝑅𝑅�⃗
𝐵𝐵
(𝑚𝑚)
Solution : 𝛼𝛼 𝑃𝑃�⃗
𝐴𝐴
1-Réaction du plan
Sur l’axe yy’ : R – Py = 0 ⇔ R= Px = mgcosα
A.N : sinα = 0,15 ⇔ α = 8,63 et R = 1 200 x 10 cos 8.63 = 1.19. 10-4N
2-Force développée par le moteur
𝐹𝐹𝑒𝑒𝑒𝑒𝑒𝑒 = �⃗
Le mouvement étant rectiligne uniforme, on a : ∑ �������⃗ 0
𝑅𝑅�⃗ + 𝑃𝑃�⃗ + 𝐹𝐹⃗ = �0⃗
Suivant l’axe XX’ :
���⃗ �⃗ ⇔ - mgsinα + F = 0 ⇔ F = mgsinα ; Pente 15% ⇒ 𝐵𝐵𝐵𝐵 = 0,15 = 𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠
𝑃𝑃𝑥𝑥 + 𝐹𝐹⃗ =𝑂𝑂
𝐴𝐴𝐴𝐴
A.N : F = 1200 x 10 x 0,15 = 1 800N
Donc F= 1 800 N et R = 1.19. 𝟏𝟏𝟏𝟏−𝟒𝟒 N
68
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
3- Travail des forces
- 𝑊𝑊(𝐹𝐹⃗ ) = 𝐹𝐹𝐹𝐹 𝑐𝑐𝑐𝑐𝑐𝑐 0° car 𝐹𝐹⃗ est parallèle à la direction 𝑥𝑥𝑥𝑥’
A.N : 𝑊𝑊(𝐹𝐹⃗ ) = 1 800 x 1200 = 2,16.106 J
�⃗) = 2,16.𝟏𝟏𝟏𝟏𝟔𝟔 J
Donc W (𝑭𝑭
-W (𝑅𝑅�⃗) = Rlcos90° = 0 (𝑅𝑅�⃗ est perpendiculaire à xx’)
W (𝑃𝑃�⃗)= - Ph = - mgh avec h = l sinα
W (𝑃𝑃�⃗)= - mgh lsinα
A.N : W (𝑃𝑃�⃗)= - 1 200 x 10 x 1 200. 0,5 = - 2,16.106 J
Donc ��⃗) = - 2,16.𝟏𝟏𝟏𝟏𝟔𝟔 J
W (𝑷𝑷
Exercice 2 :
Un tour horizontal usinant un cylindre de laminoir (voir fig ci-dessous)
1. Calculer le travail que devra fournir le tour pour usiner une passe d’usinage qui
nécessite un �⃗ �⃗� ) 1200 N.m. Si l’outil avance de 0,5 mm /tour de la pièce et
C telque �C
la passe ayant une longueur de 200 mm.
2. Calculer le rendement η du système si l’énergie absorbée par le tour durant la même
passe et W absorbée est 4,3.106 J.
Solution :
1. Travail fournie
– Nombre de tour qu’effectuera la pièce
200
n= = 400 000 tr or 1tr = 2π. rad ; d’où θ = 800 000 π. rad
0,0005
- Travail W = Cθ ; AN : W = 1200 × 800 000 π = 9.6 108 J
2. Rendement
W absorbée 4.310 6
𝜂𝜂 = = ⋍ 0,00447
W fournie 9,6.10 8
Q.C.M. DYNAMIQUE : Répondez au Questionnaire à choix multiples suivant :
Plusieurs réponses peuvent être valables, au moins une réponse est juste.
1) Quel est le signe d’un travail dit « moteur » ?
a) Positif b) Négatif c) Mixte
2) Parmi ces propositions lesquelles expriment un travail ?
a) 𝐶𝐶 × 𝑙𝑙 b) 𝐹𝐹 × 𝑙𝑙 c) 𝐶𝐶 × 𝜃𝜃 d) 𝐹𝐹 × 𝜃𝜃
69
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
3) Cocher la ou les bonnes relations entre puissance et travail :
𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑
a) 𝑃𝑃 = b) 𝑊𝑊 = c) 𝑃𝑃 = ∫ 𝑊𝑊𝑊𝑊𝑊𝑊 d) 𝑊𝑊 = ∫ 𝑃𝑃𝑃𝑃𝑃𝑃
𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑
4) La ou les bonnes expressions du rendement :e=entrée s=sortie u=utile et a=absorbée
𝑃𝑃 𝑃𝑃 𝑃𝑃 𝑃𝑃
a) 𝜂𝜂 = 𝑒𝑒 b) 𝜂𝜂 = 𝑠𝑠 c) 𝜂𝜂 = 𝑎𝑎 d) 𝜂𝜂 = 𝑢𝑢
𝑃𝑃𝑠𝑠 𝑃𝑃𝑒𝑒 𝑃𝑃𝑢𝑢 𝑃𝑃𝑎𝑎
5) La ou les bonnes expressions de l’énergie cinétique :
1 1 1 1 1 1
a) 𝐽𝐽𝐽𝐽² b) 𝑚𝑚𝑚𝑚² c) 𝑚𝑚𝑚𝑚² d) 𝐽𝐽𝐽𝐽² e) ( 𝐽𝐽𝜔𝜔2 + 𝑚𝑚𝑉𝑉 2 )
2 2 2 2 2 2
6) La ou les unités du travail :
𝐽𝐽
a) 𝑊𝑊 b) 𝐽𝐽 c) �𝑠𝑠 d) 𝑊𝑊�𝑠𝑠
7) La ou les bonnes valeurs du rendement:
a) 𝑂𝑂 < 𝜂𝜂 < 1 b) η est toujours > 0 c) 𝜂𝜂 > 1
8) Quelles sont les bonnes expressions qui expriment la puissance P ?
a) 𝐹𝐹 × 𝑙𝑙 b) 𝐹𝐹 × 𝑉𝑉 c) 𝐶𝐶 × 𝜃𝜃 d) 𝐶𝐶 × 𝜔𝜔 e) 𝐶𝐶 × 𝑙𝑙
9) La puissance traduit un débit d’énergie :
a) Vrai b) Faux c) Vrai et Faux
10) L’énergie cinétique est liée aux:
a) Forces produisant le déplacement b) aux vitesses de déplacement
11) Un pont roulant supporte une charge de 100 daN, la vitesse de montée est de 1m/s.
Quelle est la puissance développée pour soulever la charge ?
a) 100 W b) -1 000 W c) 1 000 W d) -100 W
12) Quelle est l’expression erronée pour la puissance ? P =
a) 𝐹𝐹. 𝑉𝑉. 𝑐𝑐𝑐𝑐𝑐𝑐θ b) 𝐹𝐹. 𝑉𝑉. 𝑠𝑠𝑠𝑠𝑠𝑠θ c) Aucune d) Toutes
13) Un convoyeur soulève une palette de 𝟎𝟎, 𝟓𝟓 𝒕𝒕 en 𝟐𝟐𝟐𝟐 à une hauteur de 𝟑𝟑 𝒎𝒎. Quelle est
la puissance développée ? 𝒈𝒈 = 𝟗𝟗, 𝟖𝟖 𝑵𝑵/𝑲𝑲𝑲𝑲 .
a) 7 350𝑊𝑊 b) 8 335 𝑊𝑊 c) 14700 𝑊𝑊 d) 7,35 𝑊𝑊
14) Une masse de 10 Kg tombe en chute libre depuis une hauteur de 9m, quelle est son
énergie cinétique au bout de 4 s? 𝒈𝒈 = 𝟗𝟗, 𝟖𝟖 𝑵𝑵/𝑲𝑲𝑲𝑲 :
a) 4 000 𝐽𝐽 b) 7 683,2 𝐽𝐽 c) 15 366,4 𝐽𝐽 d) Pas d’énergie cinétique
15) Quelle est la puissance développée par une machine tournante dont m= 100 Kg,
J=0.5 Kg.m2, V=1 m/s, ω=10 rad/s, 𝒈𝒈 = 𝟗𝟗, 𝟖𝟖 𝑵𝑵/𝑲𝑲𝑲𝑲 ?
a) 1 000 𝑊𝑊 b) 980 𝑊𝑊 c) 490 𝑊𝑊 d) 25 𝑊𝑊
16) Quel est le travail fourni par la tige d’un vérin qui soulève verticalement un poids
de 400N à une vitesse de 3m/s sur 1 m de hauteur ?
a) 1 200 𝐽𝐽 b) 4 000 𝐽𝐽 c) 400 𝐽𝐽 d) 12 000 𝐽𝐽 e) 1200 𝑊𝑊
17) Soit un camion de 10 tonnes qui roule à 72 Km/h, quel est son énergie cinétique ?
a) 100 𝐽𝐽 b) 720 𝐽𝐽 c) 2 000 000 𝐽𝐽 d) 2 × 106 M e) 720 000 𝑀𝑀
18) Considérons un volant d’inertie pour lequel J= 10Kg.m2 autour de son axe et de
vitesse de rotation N=500tr/min ; son énergie cinétique vaut alors Ec =
a) 12,5 𝑀𝑀𝑀𝑀 b) 1,25 𝑀𝑀𝑀𝑀 c) 13,707 𝐾𝐾𝐾𝐾 d) 13707 𝐾𝐾𝐾𝐾
19) Un solide en rotation a, au démarrage, une accélération de 10 rad/s2 pour arriver à
une vitesse de 5rad/s et ceci s’effectue en un tour ; C=5 N.m, quel est le travail développé ?
a) 31.4 𝐽𝐽 b) 50 𝐽𝐽 c) 25 𝐽𝐽 d) 5 𝐽𝐽
20) Un solide accélère sur une distance de 8m avec a= 5m/s2 , V= 10m/s et une force
motrice F=3N ; quelle est la puissance développé ?
a) 30 𝑊𝑊 b) 50 𝑊𝑊 c) 15 𝑊𝑊 d) 24 𝑊𝑊
70
1éres & Tles
LE BORD DE MECANIQUE APPLIQUEE
EPREUVES ET CORRIGES DES RECENTS EXAMENS OFFICIELS
Q.C.M. STATIQUE - Corrigé
1) c 2) b 3) a 4) c 5) c 6) b 7) b 8) a 9) b 10) c 11) c 12) a 13) a 14) b 15) a 16) a 17) b 18) a 19) a
20) b 21) c 22) a 23) c 24) a 25) a 26) c 27) b
Q.C.M. DYNAMIQUE - Corrigé
1) a 2) b,c 3) a,d 4) b,d 5) a,c,e 6) b,d 7) a 8) b,d 9) a 10) b 11) c 12) c 13) a 14) b 15) b 16) c 17) e,d
18) c 19) a 20) a
71
1éres & Tles
C
e document plus qu’un recueil des condensés de cours est un guide
permettant d’assimiler différentes méthodes de résolution des problèmes
de mécanique appliquée à l’usage aussi bien des élèves que des
professeurs.
Il aborde et explique plusieurs méthodes et propose à son utilisateur une
multitude d’exercices lui permettant de les assoir. Nous mettons à votre
disposition un compagnon qui vous permettra de démystifier la mécanique
appliquée. Votre perception de cette matière devrait connaitre une véritable
révolution. Un usage judicieux de celui-ci ouvrage vous fera quitter des
profondeurs des eaux vers « le bord » ou le rivage.
Certes cette première édition n’aborde pas la totalité des notions de mécanique
appliquée mais est en cela comblée par la multitude d’exercices, de QCM et
d’épreuves d’examen qui n’omettent aucune partie du programme. Faites de ce
livre un outil pour tout d’abord comprendre, s’entrainer et ensuite pour passer
vos examens et autres concours.
Toute œuvre humaine étant perfectible, nous espérons recevoir vos remarques et
suggestions afin d’améliorer ce travail.
L’auteur
(+237) 675 60 31 71
Collection NGARO
Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- TD FinaleDocument8 pagesTD Finalewass princePas encore d'évaluation
- 85773677cours Torseur Statique PDFDocument4 pages85773677cours Torseur Statique PDFOuday ChikhaouiPas encore d'évaluation
- Electronique de Puissance L2 S2Document74 pagesElectronique de Puissance L2 S2Sofiane BePas encore d'évaluation
- Construction MécaniqueDocument70 pagesConstruction MécaniqueMohamed EddriefPas encore d'évaluation
- Cours de Physique I Mecanique Introduction 2015 Old1Document42 pagesCours de Physique I Mecanique Introduction 2015 Old1daniel tshipamba lubadiPas encore d'évaluation
- VibratisDocument53 pagesVibratisAnonymous 8sKhRMp100% (2)
- Corrige Cours Flex I OnDocument6 pagesCorrige Cours Flex I Onmathx34694Pas encore d'évaluation
- TP de Construction MécaniqueDocument8 pagesTP de Construction MécaniqueImane El Ouadrhiri100% (2)
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriPas encore d'évaluation
- Dossier de Technologie de Construction Mécanique 2Document50 pagesDossier de Technologie de Construction Mécanique 2ahmed100% (2)
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
- Regulateur Boules Correction CINEMATIQUEDocument6 pagesRegulateur Boules Correction CINEMATIQUEMoustapha Diagne100% (1)
- 02 - Torseur Statique Mode de CompatibiliteDocument20 pages02 - Torseur Statique Mode de CompatibiliteAmina DinariPas encore d'évaluation
- dcn3 3t2 Dispositif D Entrainement CorrectionDocument4 pagesdcn3 3t2 Dispositif D Entrainement CorrectionGuiliass100% (1)
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddinePas encore d'évaluation
- Exo 5 Statique PerceuseDocument2 pagesExo 5 Statique PerceuseSamba Sall38% (8)
- Filetage Et Taraudage Cours PDFDocument4 pagesFiletage Et Taraudage Cours PDFnosilin100% (2)
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumPas encore d'évaluation
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbPas encore d'évaluation
- FC05b Statique GraphiqueDocument7 pagesFC05b Statique Graphiquepouvoir Koussou100% (1)
- Exo 06 07 Corrige Chaines OuvertesDocument4 pagesExo 06 07 Corrige Chaines OuvertesAyoubPas encore d'évaluation
- 1 Cours Statique AnalytiqueDocument2 pages1 Cours Statique AnalytiqueMohamed NaciriPas encore d'évaluation
- Treuil Sujet Et CorrigeDocument3 pagesTreuil Sujet Et CorrigeThierry OUAMBO FOTSOPas encore d'évaluation
- Transformation Des Mvts 10-11Document4 pagesTransformation Des Mvts 10-11MIMFS100% (2)
- Chapitre 2 Liaison Complete ProfDocument8 pagesChapitre 2 Liaison Complete Profstylo azregPas encore d'évaluation
- TD N°3 PFS AnalytiqueDocument6 pagesTD N°3 PFS AnalytiqueRoubaPas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Evaluation Cot Fonc Verin Bosch Prof PDFDocument4 pagesEvaluation Cot Fonc Verin Bosch Prof PDFTafotchin Kone100% (1)
- Exercices Champ Electrostatique PDFDocument2 pagesExercices Champ Electrostatique PDFAlexandria67% (6)
- Liaison EncastrementDocument9 pagesLiaison Encastrementsaded05Pas encore d'évaluation
- B&K Vibro Senzor DatasheetDocument9 pagesB&K Vibro Senzor DatasheetIvan JablanovićPas encore d'évaluation
- TD Statique - Avion Militaire CorrigéDocument3 pagesTD Statique - Avion Militaire CorrigéThierry MarvynPas encore d'évaluation
- Statique Du SolideDocument55 pagesStatique Du SolideZiko100% (1)
- 05 - PFS TDDocument6 pages05 - PFS TDJean Jules Badiang100% (1)
- Guide de Planification Du Cours de Mécanique Appliquée en Première E, F1, MA, MEMDocument33 pagesGuide de Planification Du Cours de Mécanique Appliquée en Première E, F1, MA, MEMESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Epreuve Constr Meca T1 1er GR 2023Document6 pagesEpreuve Constr Meca T1 1er GR 2023josias zinsouPas encore d'évaluation
- TD1 PFS 17 18Document4 pagesTD1 PFS 17 18Yassine Bouchatta50% (2)
- Principe Fondamental de La StatiqueDocument10 pagesPrincipe Fondamental de La StatiqueGYPAETEPas encore d'évaluation
- Les Liaisons Doc Prof MOUKHTARIDocument9 pagesLes Liaisons Doc Prof MOUKHTARIELMustaphaELMoukhtariPas encore d'évaluation
- 67 C11 D 01Document3 pages67 C11 D 01SegaAlainCoulibaly100% (3)
- L'ABAQUE 2nd Méca Élève, PDFDocument88 pagesL'ABAQUE 2nd Méca Élève, PDFESSOME ESSOME OLIVIER STEPHANE100% (3)
- CH 5 Circuits Lineaires en Regime Sinusoidal MonophaseDocument17 pagesCH 5 Circuits Lineaires en Regime Sinusoidal Monophasekonan ezekielPas encore d'évaluation
- CC1 Im1 Ie1 17 18Document1 pageCC1 Im1 Ie1 17 18Hamza RimiPas encore d'évaluation
- Corriges Mécanique Lève Moto EtDocument2 pagesCorriges Mécanique Lève Moto EtDavid Jay100% (1)
- Equilibre - Solide - Soumis - 4 - Forces - Et - PlusDocument6 pagesEquilibre - Solide - Soumis - 4 - Forces - Et - PlusakouPas encore d'évaluation
- Exercice - RDM - Cisaillement - Clavette Motorducteur - EnoncDocument4 pagesExercice - RDM - Cisaillement - Clavette Motorducteur - Enoncomar-benka-3821Pas encore d'évaluation
- Exercice Cotes ToleranDocument2 pagesExercice Cotes Toleransamir ghebouli100% (1)
- A4 EE Et MA Mini Etau de Serrage 1Document3 pagesA4 EE Et MA Mini Etau de Serrage 1Rodolphe Sounou67% (3)
- Chapitre 2 MODELISATION DES LIAISONSDocument15 pagesChapitre 2 MODELISATION DES LIAISONSChaker Chaoual100% (1)
- Cours Sur Le Guidage en Rotation Et TranslationDocument48 pagesCours Sur Le Guidage en Rotation Et Translationjunior MAKOSSOPas encore d'évaluation
- Abri BusDocument2 pagesAbri BusMama Samba SALLPas encore d'évaluation
- TD Palan Électrique À Chaine1Document4 pagesTD Palan Électrique À Chaine1xz4 zertoxPas encore d'évaluation
- Caractères de LiaisonDocument5 pagesCaractères de LiaisonGuy Effa100% (1)
- Texte de L'Epreuve:: Epreuve: Etude D'OutillageDocument5 pagesTexte de L'Epreuve:: Epreuve: Etude D'OutillageBass SowPas encore d'évaluation
- SerrageDocument3 pagesSerrageKiko Poli100% (3)
- 31 EmbrayagesDocument12 pages31 EmbrayagesSimoMonkad100% (1)
- Tech Mat Prob F1 - CorrigeDocument6 pagesTech Mat Prob F1 - CorrigeDayang Dayang100% (2)
- Dessin A4Document63 pagesDessin A4Loic MfonziePas encore d'évaluation
- Guidage en Translation PDFDocument10 pagesGuidage en Translation PDFAzerty DelegfrPas encore d'évaluation
- Sujet de Mémoire HAMZADocument3 pagesSujet de Mémoire HAMZAAdel AldusPas encore d'évaluation
- 9500 PDFDocument9 pages9500 PDFhidra bedhiafiPas encore d'évaluation
- TP2 DiscontinuitésDocument5 pagesTP2 Discontinuitéselhamzamamoune2007Pas encore d'évaluation
- Matlab2009 tp3Document2 pagesMatlab2009 tp3Abdel DaaPas encore d'évaluation
- Chapitre II 1er Principe-ConvertiDocument19 pagesChapitre II 1er Principe-ConvertiÑar ĎjesPas encore d'évaluation
- TP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)Document12 pagesTP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)ayanokojiPas encore d'évaluation
- RS28F (WWW - Pc1.ma)Document7 pagesRS28F (WWW - Pc1.ma)Lhoussine bougeulbaPas encore d'évaluation
- TD4 DynamiqueDocument2 pagesTD4 DynamiqueAFADPas encore d'évaluation
- Suivi Vibratoire Des TransmissionsDocument6 pagesSuivi Vibratoire Des TransmissionsDRISSIPas encore d'évaluation
- Chapitre II - Systèmes Du Premier Ordre - AII3Document5 pagesChapitre II - Systèmes Du Premier Ordre - AII32TowPas encore d'évaluation
- Introduction Aux Cristaux PhotoniquesDocument53 pagesIntroduction Aux Cristaux PhotoniquesIsraa Wissal RedouanePas encore d'évaluation
- TP 2Document7 pagesTP 2Ali AhmedPas encore d'évaluation
- Defaut ResistantDocument6 pagesDefaut Resistantrimo0550% (2)
- CC Electromagnetisme 1Document11 pagesCC Electromagnetisme 1yvan dokoloPas encore d'évaluation
- Chapitre 3 Flexion Composée (ELU)Document12 pagesChapitre 3 Flexion Composée (ELU)Raouf MouyetPas encore d'évaluation
- Contrôle 25Document3 pagesContrôle 25nabla199100% (1)
- Chap 7 Champ ElectrostatiqueDocument4 pagesChap 7 Champ ElectrostatiqueFadlou ISSAKAPas encore d'évaluation
- TD 1 - Cristallo 2019Document2 pagesTD 1 - Cristallo 2019rahma rahmaPas encore d'évaluation
- Chapitre 1 SMP4 Electronique Print. 2017Document34 pagesChapitre 1 SMP4 Electronique Print. 2017Ayoub BahtatPas encore d'évaluation
- Signaux Physiques - Chapitre 3-Circuits Lineaires Du Premier Ordre PDFDocument46 pagesSignaux Physiques - Chapitre 3-Circuits Lineaires Du Premier Ordre PDFDavid KonanPas encore d'évaluation
- CHM 144 ?Document107 pagesCHM 144 ?wilfriedpokeboyPas encore d'évaluation
- 12-Exo-Elect - Cours PHY104 - 2020-2021-2Document9 pages12-Exo-Elect - Cours PHY104 - 2020-2021-2Justin HONKOUPas encore d'évaluation
- Chapitre 6 CND Par UltrasonsDocument60 pagesChapitre 6 CND Par UltrasonshasagiPas encore d'évaluation
- Relations À Travers Un Choc DroitDocument6 pagesRelations À Travers Un Choc DroitScribd ReaderPas encore d'évaluation
- Simulation Dynamique Des Fluides Avec ExcelDocument4 pagesSimulation Dynamique Des Fluides Avec ExcelAhmed BoussoffaraPas encore d'évaluation