Vous aimerez peut-être aussi
- TP BarriereDocument7 pagesTP BarriereSamir SaidPas encore d'évaluation
- Conception D'un HacheurDocument9 pagesConception D'un HacheurHamza NabilPas encore d'évaluation
- Modules Papier Systeme Industriel PDFDocument41 pagesModules Papier Systeme Industriel PDFNajah Migaw Mokhtar100% (1)
- Activites de Decouverte de La Maintenance2 PDFDocument14 pagesActivites de Decouverte de La Maintenance2 PDFdidPas encore d'évaluation
- Dimensionnement Des Composants Pour Convertisseur SEPIC 2Document20 pagesDimensionnement Des Composants Pour Convertisseur SEPIC 2Abdelkarim D. AdelPas encore d'évaluation
- Sirena SonerieDocument7 pagesSirena SonerieIordan Dan FfnPas encore d'évaluation
- MMOAMPA - 14 - Installation Et Entretien Des machinesCC-1 PDFDocument85 pagesMMOAMPA - 14 - Installation Et Entretien Des machinesCC-1 PDFMohammed Moha ChtiouiPas encore d'évaluation
- Electronique - Realisations - Ligne Tel Et Detection Sonnerie - 1679585648093Document2 pagesElectronique - Realisations - Ligne Tel Et Detection Sonnerie - 1679585648093Aumeric100% (1)
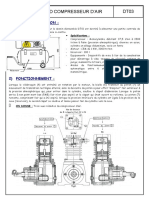
- TD CompresseurDocument12 pagesTD CompresseurMostfa RiahiPas encore d'évaluation
- Indicateur de Brochage Pour TransistorDocument5 pagesIndicateur de Brochage Pour TransistorguiguessPas encore d'évaluation
- Compte Rendu de Mini Stage D'étéDocument38 pagesCompte Rendu de Mini Stage D'étéHasnae BohouchPas encore d'évaluation
- S2-1b AP1 Distributeur Savon (Adapter)Document6 pagesS2-1b AP1 Distributeur Savon (Adapter)beiebfyhfzPas encore d'évaluation
- Rapport Hydraulique TPDocument8 pagesRapport Hydraulique TPHamza BNPas encore d'évaluation
- Modélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxDocument7 pagesModélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxOkacha AmraouyPas encore d'évaluation
- TD Mesures en ReseauDocument25 pagesTD Mesures en ReseauKhaled OuniPas encore d'évaluation
- Travaux Pratiques2Document7 pagesTravaux Pratiques2Tarek KlaiPas encore d'évaluation
- Activites de Decouverte de La MaintenanceDocument14 pagesActivites de Decouverte de La MaintenanceMaxence KouessiPas encore d'évaluation
- TP RobotiqueDocument11 pagesTP Robotiquesouhil djoghlafPas encore d'évaluation
- EP1grpIVReponses2004 Install Elec Supermarché PDFDocument17 pagesEP1grpIVReponses2004 Install Elec Supermarché PDFsbabdexPas encore d'évaluation
- Mini ProjetDocument12 pagesMini ProjetAbdelouahab BakerPas encore d'évaluation
- Projet ElectroDocument10 pagesProjet ElectroDonatien ZONGOPas encore d'évaluation
- Sup 3Document13 pagesSup 3jgildominPas encore d'évaluation
- TP Api1-1 MicroLogix1200Document6 pagesTP Api1-1 MicroLogix1200Mohamed RgnPas encore d'évaluation
- Examen de Fin de Module Installation Entretien Commande A TBT TemiDocument2 pagesExamen de Fin de Module Installation Entretien Commande A TBT TemisbensouayahPas encore d'évaluation
- Chapitre 2 Simulation de FluxDocument22 pagesChapitre 2 Simulation de FluxIkbel HahaPas encore d'évaluation
- Convertisseurs de LElectronique de PuissDocument33 pagesConvertisseurs de LElectronique de Puissfarid saadPas encore d'évaluation
- Dut Gim PDFDocument4 pagesDut Gim PDFSoufiane BelarbiPas encore d'évaluation
- FR Technical Guide No 7 REVCDocument40 pagesFR Technical Guide No 7 REVCbado badoxPas encore d'évaluation
- Dispositif de Serrage PDFDocument6 pagesDispositif de Serrage PDFAyoub Bellame100% (1)
- M21 - Accessoires de Transmission Et de Transformation Du Mouvement GE-ESADocument8 pagesM21 - Accessoires de Transmission Et de Transformation Du Mouvement GE-ESAMohammed Amine Kened0% (1)
- DRM CorrigéDocument6 pagesDRM CorrigéNajet MarsPas encore d'évaluation
- Contact EurDocument23 pagesContact EurbenjarrayPas encore d'évaluation
- Conception Circuits PDFDocument183 pagesConception Circuits PDFAngel Pérez SantiagoPas encore d'évaluation
- M18 Demontage Et Montage Des Systemes Mecaniques MmoampaDocument47 pagesM18 Demontage Et Montage Des Systemes Mecaniques Mmoampaselim ghnayaPas encore d'évaluation
- Atelier Systemes Industriels tp1 PDFDocument11 pagesAtelier Systemes Industriels tp1 PDFhayet debbichPas encore d'évaluation
- CR TP2 Sabrine&Tarek GI2B G2Document6 pagesCR TP2 Sabrine&Tarek GI2B G2Tarek KlaiPas encore d'évaluation
- ATV630 650 Installation Manual FR EAV64302 04Document120 pagesATV630 650 Installation Manual FR EAV64302 04saidloubarPas encore d'évaluation
- E03.15.046.g - FR - Regles de Realisation Des Dossiers Electriques - 2Document39 pagesE03.15.046.g - FR - Regles de Realisation Des Dossiers Electriques - 2auduserPas encore d'évaluation
- Pfe FinalDocument83 pagesPfe FinalghassenPas encore d'évaluation
- Module n06 Lecture Et Interpretation Dun Dessin Technique Mecanique MmoampaDocument52 pagesModule n06 Lecture Et Interpretation Dun Dessin Technique Mecanique MmoampaATMANE ZIDOUHPas encore d'évaluation
- TD ETAU DE MODELISTE e PDFDocument5 pagesTD ETAU DE MODELISTE e PDFAlexis AlexisPas encore d'évaluation
- M07 - Analyse de Circuits À C.A.Document151 pagesM07 - Analyse de Circuits À C.A.Pic PicPas encore d'évaluation
- EC4 TP2b PDFDocument8 pagesEC4 TP2b PDFPape Niokhor NdiayePas encore d'évaluation
- TP2 Arduino SerialDocument7 pagesTP2 Arduino SerialBarry Mamadou LamaranePas encore d'évaluation
- TP2 FiabDocument3 pagesTP2 FiabAissa HenniPas encore d'évaluation
- Schematisation Des Systemes - SCM Et Liaison TSI1Document18 pagesSchematisation Des Systemes - SCM Et Liaison TSI1Fakhreddine NaimiPas encore d'évaluation
- Logique CableeDocument14 pagesLogique CableeAbdou GoodPas encore d'évaluation
- Serrage PDFDocument10 pagesSerrage PDFhmayda riadPas encore d'évaluation
- Le Sèche-Linge TOP CORIOLISDocument73 pagesLe Sèche-Linge TOP CORIOLISJean BookPas encore d'évaluation
- 02 Premier Schema Uc Msp430g2553Document2 pages02 Premier Schema Uc Msp430g2553Denis OLIVE100% (1)
- L1-GIM - Hydraulique Et Pneumatique-TD 3-4 - 2 - Copie - CopieDocument3 pagesL1-GIM - Hydraulique Et Pneumatique-TD 3-4 - 2 - Copie - CopiemezziPas encore d'évaluation
- Etude Expérimentale D'un Hacheur ÉlévateurDocument12 pagesEtude Expérimentale D'un Hacheur ÉlévateurSam PerochonPas encore d'évaluation
- Chapitre 2 Circuits Electriques Et Ses ComposantsDocument54 pagesChapitre 2 Circuits Electriques Et Ses ComposantsElhadji Mayacine NguiranePas encore d'évaluation
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoD'EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoPas encore d'évaluation
- Chap1 Generalites Sur Les Entrainements ElectriquesDocument4 pagesChap1 Generalites Sur Les Entrainements ElectriquesSalah PanikaPas encore d'évaluation
- Electrotechnique EEA TP7 SujetDocument7 pagesElectrotechnique EEA TP7 SujetSalmeMeztouPas encore d'évaluation
- TP Commande Des MachinesDocument21 pagesTP Commande Des MachinesTa Divika Hasterivy100% (1)
- Cours Commande Des MachinesDocument40 pagesCours Commande Des MachinesyaoPas encore d'évaluation
- Command Machin ElectrDocument28 pagesCommand Machin ElectrAhmed KramdiPas encore d'évaluation
- Stabilisation Par Diode ZénerDocument1 pageStabilisation Par Diode ZénerHaidra HaidraPas encore d'évaluation
- tp02 IdentificationDocument4 pagestp02 IdentificationHaidra HaidraPas encore d'évaluation
- TP1 Ident Des SysDocument4 pagesTP1 Ident Des SysHaidra HaidraPas encore d'évaluation
- Cours CME MASDocument75 pagesCours CME MASHaidra HaidraPas encore d'évaluation
- Cours CME MSDocument34 pagesCours CME MSHaidra HaidraPas encore d'évaluation
- L'Essai Du Bleu de MéthylèneDocument2 pagesL'Essai Du Bleu de Méthylènematarach80% (5)
- Limites Et ContinuitéDocument6 pagesLimites Et ContinuitéChai mae AgnawPas encore d'évaluation
- Oscillations Mécaniques AT Renf TS2Document5 pagesOscillations Mécaniques AT Renf TS2Coumbis DioufPas encore d'évaluation
- Chap3 Thermodynamique Des Réactions ÉlectrochimiquesDocument9 pagesChap3 Thermodynamique Des Réactions Électrochimiquesemma VPas encore d'évaluation
- Présentation Renforcement D Martin Juin 09 (Mode de Compatibilité)Document52 pagesPrésentation Renforcement D Martin Juin 09 (Mode de Compatibilité)chouidiPas encore d'évaluation
- Solution de La Serie de TD de Cristallographie - SMP-SMC - s4-2019-2020 - PR Abderrafi BritelDocument43 pagesSolution de La Serie de TD de Cristallographie - SMP-SMC - s4-2019-2020 - PR Abderrafi BritelMohamed Ouaa100% (1)
- Série Exemplesd'actions MécaniquesDocument1 pageSérie Exemplesd'actions MécaniquesgotinedragonPas encore d'évaluation
- Chapitre 2 - Théorie de Létat de de ContraintesDocument36 pagesChapitre 2 - Théorie de Létat de de ContraintesNaima NaPas encore d'évaluation
- Conversion PhotothermiqueDocument35 pagesConversion PhotothermiqueahlsidihommadefatimaPas encore d'évaluation
- Exam08 09Document2 pagesExam08 09Ahmed Frej100% (1)
- Corrosion 2Document75 pagesCorrosion 2zay yassinePas encore d'évaluation
- Rapport de Stage Steg ZarzisDocument11 pagesRapport de Stage Steg ZarzisSara GherriPas encore d'évaluation
- CH4 Notions Sur Le Dimensionnement Des Ouvrages Courants-ConvertedDocument11 pagesCH4 Notions Sur Le Dimensionnement Des Ouvrages Courants-ConvertedAbdelaziz KraaPas encore d'évaluation
- S1 StructureDocument3 pagesS1 StructureberrimayaakoubPas encore d'évaluation
- 2 TrigonometrieDocument3 pages2 TrigonometriedxsszszPas encore d'évaluation
- Erico BornesDocument2 pagesErico BornesbePas encore d'évaluation
- TP Quantifier Un Transfert ThermiqueDocument7 pagesTP Quantifier Un Transfert ThermiqueSebVinothPas encore d'évaluation
- Mef Elas 1dDocument49 pagesMef Elas 1dYoussef LAASRIPas encore d'évaluation
- GBP 16 Levage VF PDFDocument8 pagesGBP 16 Levage VF PDFchorfi yacine100% (1)
- Cours Chapitre1 Et 2Document36 pagesCours Chapitre1 Et 2Rim Ben RziguePas encore d'évaluation
- 2 - Structure Du NoyauDocument14 pages2 - Structure Du NoyauinoussadaoudaPas encore d'évaluation
- Analyse Se Quelques Matières PremièresDocument8 pagesAnalyse Se Quelques Matières PremièresCeramiatPas encore d'évaluation
- Les PoutresDocument15 pagesLes PoutresÃh Mëd Hä Mdį100% (2)
- Electricite: Chapitre 5 Dipôles Électriques Passifs Linéaires - ImpédancesDocument18 pagesElectricite: Chapitre 5 Dipôles Électriques Passifs Linéaires - ImpédancesBelkacem NadirPas encore d'évaluation
- Éolien Realiser Par Seif Eddine BensahsahDocument33 pagesÉolien Realiser Par Seif Eddine BensahsahNouhaila SahibPas encore d'évaluation
- Les Séries de Fourier - Méthode MathsDocument10 pagesLes Séries de Fourier - Méthode Mathsngombe emmanuelPas encore d'évaluation
- Propriétés Et Applications Des Métaux FrittésDocument19 pagesPropriétés Et Applications Des Métaux FrittéshamzaPas encore d'évaluation
- Cours Barrages - 1a-Master-Voa 2018-2019Document306 pagesCours Barrages - 1a-Master-Voa 2018-2019Chaker Mohamed Ramzi100% (2)
- TD 1 Eq Elec Reg IndDocument2 pagesTD 1 Eq Elec Reg Indradouane chefragPas encore d'évaluation
- Epreuve Bac Maint IndDocument19 pagesEpreuve Bac Maint IndkamuroPas encore d'évaluation