Vous aimerez peut-être aussi
- Caracterisation Des LiaisonsDocument23 pagesCaracterisation Des LiaisonsGuillaume PiquetPas encore d'évaluation
- Ch1 - Modelisation Des Liaisons-Prof Page 3-7Document8 pagesCh1 - Modelisation Des Liaisons-Prof Page 3-7Sheikh Al-shoteriPas encore d'évaluation
- 19 Formalisation Schema CinematiqueDocument2 pages19 Formalisation Schema CinematiqueYoussef TrimechPas encore d'évaluation
- TD ETAU DE MODELISTE e PDFDocument5 pagesTD ETAU DE MODELISTE e PDFAlexis AlexisPas encore d'évaluation
- Correction Partie 1Document68 pagesCorrection Partie 1Gassoumi WalidPas encore d'évaluation
- DPM PDFDocument3 pagesDPM PDFLotfi NairiPas encore d'évaluation
- Chapitre 2 Simulation de FluxDocument22 pagesChapitre 2 Simulation de FluxIkbel HahaPas encore d'évaluation
- Ch4 - Ingénierie Des Systèmes IndustrielsDocument34 pagesCh4 - Ingénierie Des Systèmes Industrielsyosr magmaguiPas encore d'évaluation
- Indicateur de Brochage Pour TransistorDocument5 pagesIndicateur de Brochage Pour TransistorguiguessPas encore d'évaluation
- S2-1b AP1 Distributeur Savon (Adapter)Document6 pagesS2-1b AP1 Distributeur Savon (Adapter)beiebfyhfzPas encore d'évaluation
- Cours 2AS Completv1Document58 pagesCours 2AS Completv1MohamedAyoubPas encore d'évaluation
- Chapitre VI - LA - MODELISATION - METIERSDocument31 pagesChapitre VI - LA - MODELISATION - METIERSdonald kevin kamdem kamgaingPas encore d'évaluation
- Activites de Decouverte de La Maintenance2 PDFDocument14 pagesActivites de Decouverte de La Maintenance2 PDFdidPas encore d'évaluation
- 06 ProgrammerDocument407 pages06 Programmertalaini100% (1)
- M18 Demontage Et Montage Des Systemes Mecaniques MmoampaDocument47 pagesM18 Demontage Et Montage Des Systemes Mecaniques Mmoampaselim ghnayaPas encore d'évaluation
- Modélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxDocument7 pagesModélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxOkacha AmraouyPas encore d'évaluation
- CR TP2 Sabrine&Tarek GI2B G2Document6 pagesCR TP2 Sabrine&Tarek GI2B G2Tarek KlaiPas encore d'évaluation
- TP Api1-1 MicroLogix1200Document6 pagesTP Api1-1 MicroLogix1200Mohamed RgnPas encore d'évaluation
- Serrage PDFDocument10 pagesSerrage PDFhmayda riadPas encore d'évaluation
- Graphe de Montage Et de DémontageDocument8 pagesGraphe de Montage Et de DémontageMohsen LaabidiPas encore d'évaluation
- Introduction À SolidWorks CHAPITRE E1 - Pièces - 19.09.2006Document88 pagesIntroduction À SolidWorks CHAPITRE E1 - Pièces - 19.09.2006youcef khenchoulPas encore d'évaluation
- M12 - Usinage Manuel GE-ESADocument7 pagesM12 - Usinage Manuel GE-ESABakr IbrahimiPas encore d'évaluation
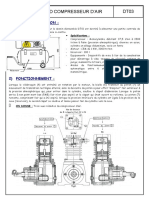
- TD CompresseurDocument12 pagesTD CompresseurMostfa RiahiPas encore d'évaluation
- Cours CMEDocument39 pagesCours CMEHaidra HaidraPas encore d'évaluation
- Le Sèche-Linge TOP CORIOLISDocument73 pagesLe Sèche-Linge TOP CORIOLISJean BookPas encore d'évaluation
- DRM CorrigéDocument6 pagesDRM CorrigéNajet MarsPas encore d'évaluation
- Travaux Pratiques2Document7 pagesTravaux Pratiques2Tarek KlaiPas encore d'évaluation
- m02 - Interprétation de Schémas, de Plans Et de Devis Ge-Esa BackupDocument9 pagesm02 - Interprétation de Schémas, de Plans Et de Devis Ge-Esa BackupBakr IbrahimiPas encore d'évaluation
- Cours - Suite de La Statique + CH (III) Cinématique Du Solide P.FDocument15 pagesCours - Suite de La Statique + CH (III) Cinématique Du Solide P.FMeroua LounaoussiPas encore d'évaluation
- Chapitre 1 Modélisation Des Systèmes PhysiquesDocument9 pagesChapitre 1 Modélisation Des Systèmes PhysiquesNothaßan BerryPas encore d'évaluation
- Partie3 ING1Document40 pagesPartie3 ING1Bourezak CélinePas encore d'évaluation
- Chap 2 Modelisation Des Actions MecaniquesDocument8 pagesChap 2 Modelisation Des Actions MecaniquesAida DiackPas encore d'évaluation
- TD4 - Analyse Des Systèmes Mécaniques (1) - CopieDocument3 pagesTD4 - Analyse Des Systèmes Mécaniques (1) - CopieReda KabelPas encore d'évaluation
- Pertes de Charge SyntheseDocument4 pagesPertes de Charge SyntheseDhikrane NafaaPas encore d'évaluation
- r6100 PDFDocument20 pagesr6100 PDFSaad RajawiPas encore d'évaluation
- Sirena SonerieDocument7 pagesSirena SonerieIordan Dan FfnPas encore d'évaluation
- Formation AcoustiqueV4Document158 pagesFormation AcoustiqueV4Manuela VPas encore d'évaluation
- Universite National Des Sciences Technique DDocument16 pagesUniversite National Des Sciences Technique DGBEDOUROROUPas encore d'évaluation
- EC4 TP2b PDFDocument8 pagesEC4 TP2b PDFPape Niokhor NdiayePas encore d'évaluation
- Modélisation Et Simulation Part 5Document99 pagesModélisation Et Simulation Part 5Zaynab HomePas encore d'évaluation
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurDocument2 pagesCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienPas encore d'évaluation
- 4 Dossier ReponseDocument4 pages4 Dossier ReponseChokri AtefPas encore d'évaluation
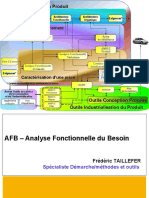
- Analyse Fonctionnelle PDFDocument15 pagesAnalyse Fonctionnelle PDFkhocinePas encore d'évaluation
- 01 - TD1-Cotation Fonctionnelle T ImpDocument8 pages01 - TD1-Cotation Fonctionnelle T Impyoucef khenchoulPas encore d'évaluation
- Schéma CinématiqueDocument19 pagesSchéma CinématiqueSimo StitPas encore d'évaluation
- 00 2STE Complet - 2021 2022Document38 pages00 2STE Complet - 2021 2022Touriya MoukhlesPas encore d'évaluation
- Guide Impression3d-Version Finale 930632Document27 pagesGuide Impression3d-Version Finale 930632Anonymous 9qKdViDP4Pas encore d'évaluation
- TP 2 Solidworks Liaisons Dans Les Mecanismes p1Document8 pagesTP 2 Solidworks Liaisons Dans Les Mecanismes p1Simo StitPas encore d'évaluation
- Sae-Situer Une Organisation Dans Son EnvironnementDocument8 pagesSae-Situer Une Organisation Dans Son Environnementapi-633541138Pas encore d'évaluation
- Usiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Document6 pagesUsiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Najet MarsPas encore d'évaluation
- Ci Bac Pro Mei v2Document6 pagesCi Bac Pro Mei v2fatihamPas encore d'évaluation
- Rappel Calcul VectorielDocument24 pagesRappel Calcul VectorielYassine EdahbiPas encore d'évaluation
- TP RobotiqueDocument11 pagesTP Robotiquesouhil djoghlafPas encore d'évaluation
- Ch1 l1 Analyse Fonctionnelle ExterneDocument7 pagesCh1 l1 Analyse Fonctionnelle ExterneezzeddinePas encore d'évaluation
- Liaisons Mã©caniques Et Schã©ma Cinã©matiqueDocument32 pagesLiaisons Mã©caniques Et Schã©ma Cinã©matiqueMohamedPas encore d'évaluation
- C5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014Document17 pagesC5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014dxsszszPas encore d'évaluation
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyPas encore d'évaluation
- Cours CT 1 Schematisation CinematiqueDocument5 pagesCours CT 1 Schematisation CinematiquePascal PonzoniPas encore d'évaluation
- 12 - Le Schéma Cinématique MinimaleDocument31 pages12 - Le Schéma Cinématique MinimaleMahmoud Moncef100% (2)
- Chapitre 2 PDFDocument4 pagesChapitre 2 PDFYasser NapoliPas encore d'évaluation
- Mémoire 2Document113 pagesMémoire 2Ăm ĘlPas encore d'évaluation
- DebimetreDocument18 pagesDebimetreMOHNISHKUMARJHAPas encore d'évaluation
- Cours de Mathematiques Speciale - Inconnu (E)Document730 pagesCours de Mathematiques Speciale - Inconnu (E)ABDOUL NASSERPas encore d'évaluation
- Notes de Cours Delectrostatique ClassesDocument104 pagesNotes de Cours Delectrostatique ClassessamiPas encore d'évaluation
- Plastique S 02Document28 pagesPlastique S 02ettbibmahdiPas encore d'évaluation
- 279 S Chaine Cinematique Des D6N PDFDocument24 pages279 S Chaine Cinematique Des D6N PDFSoufiane KadarPas encore d'évaluation
- Examen Blanc PDFDocument3 pagesExamen Blanc PDFSiŗ MèDoxPas encore d'évaluation
- Cours Emag CompletDocument160 pagesCours Emag Completnoureddin elaouchatiPas encore d'évaluation
- PDF Barriere Parking Correction PDFDocument2 pagesPDF Barriere Parking Correction PDFHaytem HirochimaPas encore d'évaluation
- Yepndo Wilson Travail Loi de FourierDocument4 pagesYepndo Wilson Travail Loi de Fourieryepndo wilsonPas encore d'évaluation
- Devoir 2 Modele 4 Physique Chimie TC Semestre 1 1Document1 pageDevoir 2 Modele 4 Physique Chimie TC Semestre 1 1maryam.zagririPas encore d'évaluation
- Cours Cinetique PDFDocument12 pagesCours Cinetique PDFSara MarouchePas encore d'évaluation
- Les Mecanismes de La Corrosion Seche PDFDocument350 pagesLes Mecanismes de La Corrosion Seche PDFRafik Dra100% (1)
- Tutorat Santé Strasbourg UE6 - CC1 - Lundi 15 Février 2021Document4 pagesTutorat Santé Strasbourg UE6 - CC1 - Lundi 15 Février 2021Amon DurantPas encore d'évaluation
- Aci Method PDFDocument7 pagesAci Method PDFNiou Mekki100% (1)
- Dossier Etude Vill at 3Document14 pagesDossier Etude Vill at 3Öthmànè BencheikhPas encore d'évaluation
- Document 1Document29 pagesDocument 1Fabien PioPas encore d'évaluation
- Exercices Corriges Series EntieresDocument19 pagesExercices Corriges Series EntieresYassino Wick0% (1)
- ZAX 70 Haute FideliteDocument2 pagesZAX 70 Haute FideliteTony RamiuliPas encore d'évaluation
- SCX-DCX SXM-DXM PC NT FR 50Hz-bdDocument8 pagesSCX-DCX SXM-DXM PC NT FR 50Hz-bdWalid ManPas encore d'évaluation
- Antennes Filaires 2Document18 pagesAntennes Filaires 2docu manitPas encore d'évaluation
- Expose Capteur UltrasonDocument29 pagesExpose Capteur UltrasonKarima Mayzi100% (5)
- Cours Travail de La Force Electrostatique 1s Aammaa 2020 LsirlDocument5 pagesCours Travail de La Force Electrostatique 1s Aammaa 2020 LsirlUlrich KouamePas encore d'évaluation
- Mécanique Quantique Et Relativité: 1. Rédigé Avec L TEXDocument85 pagesMécanique Quantique Et Relativité: 1. Rédigé Avec L TEXHousseini Dan BouzouaPas encore d'évaluation
- 2Document4 pages2Otman StariPas encore d'évaluation
- DS 19 09Document4 pagesDS 19 09Ziyad HaimPas encore d'évaluation
- Calcul Fondations SuperficiellesDocument5 pagesCalcul Fondations SuperficiellesBeny AbdouPas encore d'évaluation
- Peuchmaur Marine p04Document40 pagesPeuchmaur Marine p04Yassin IssourePas encore d'évaluation
- Exercices Sur La Réduction Des EndomorphismesDocument4 pagesExercices Sur La Réduction Des EndomorphismesEssaidi Ali50% (2)
- Les Caoutchoucs NaturelsDocument30 pagesLes Caoutchoucs NaturelsHocine ChercheurPas encore d'évaluation