Vous aimerez peut-être aussi
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Poly Théorie Des MécanismesDocument24 pagesPoly Théorie Des MécanismesJaksMaksPas encore d'évaluation
- Credit BailDocument32 pagesCredit Bailkoigina100% (3)
- Theorie Des Mecanismes-CoursDocument14 pagesTheorie Des Mecanismes-CoursAli ArroudjPas encore d'évaluation
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- Chapitre III SchémaDocument12 pagesChapitre III SchémaŞaraÇharkiPas encore d'évaluation
- Modélisation Des MécanismesDocument29 pagesModélisation Des Mécanismeshidouriabdelmoumen9802100% (8)
- Liaisons Mã©caniques Et Schã©ma Cinã©matiqueDocument32 pagesLiaisons Mã©caniques Et Schã©ma Cinã©matiqueMohamedPas encore d'évaluation
- TP Ecolexx SQL LDDDocument3 pagesTP Ecolexx SQL LDDapi-26420184Pas encore d'évaluation
- Définitions de ESQ, AVP, APD, APS, PRO, ACT, EXE, DET, OPC, AOR, DIA, ...Document24 pagesDéfinitions de ESQ, AVP, APD, APS, PRO, ACT, EXE, DET, OPC, AOR, DIA, ...lgmaPas encore d'évaluation
- Quizz 2024 CorrigÃsDocument8 pagesQuizz 2024 CorrigÃssitrakarasolosonPas encore d'évaluation
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyPas encore d'évaluation
- Essai Sur Le Bonheur Ou Réflexions Philosophiques Sur Les Biens Et Les Maux de La Vie HumaineDocument295 pagesEssai Sur Le Bonheur Ou Réflexions Philosophiques Sur Les Biens Et Les Maux de La Vie HumaineEmmanuel GleveauPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Caracterisation Des LiaisonsDocument23 pagesCaracterisation Des LiaisonsGuillaume PiquetPas encore d'évaluation
- 2 HyperstatismeDocument9 pages2 HyperstatismeMaha HammamiPas encore d'évaluation
- Schematisation Des Systemes - SCM Et Liaison TSI1Document18 pagesSchematisation Des Systemes - SCM Et Liaison TSI1Fakhreddine NaimiPas encore d'évaluation
- MLM TC1Document10 pagesMLM TC1GamatekPas encore d'évaluation
- C5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014Document17 pagesC5 CI 11 Schematisation Des Systemes - SCM Et Liaison 1TSI v2014dxsszszPas encore d'évaluation
- Lecture Des Plans Et Schemas Electriques Du Reseau DistributionDocument34 pagesLecture Des Plans Et Schemas Electriques Du Reseau DistributionAdil BELMOUMENPas encore d'évaluation
- Cours MicrDocument30 pagesCours MicrDOUNIAPas encore d'évaluation
- TP Poussoir Et Serre CableDocument1 pageTP Poussoir Et Serre CableyumiPas encore d'évaluation
- Schema Cinematique CoursDocument4 pagesSchema Cinematique CoursRihabBelgadaPas encore d'évaluation
- Schéma CinématiqueDocument48 pagesSchéma CinématiqueomatrPas encore d'évaluation
- Representation 2 EtatDocument8 pagesRepresentation 2 EtatimadPas encore d'évaluation
- Chap 1 Modelisation Liaisons (B)Document2 pagesChap 1 Modelisation Liaisons (B)Bigue SowPas encore d'évaluation
- Cours Schéma Norme Et Ins Dom Rades - Docx - Google DocsDocument76 pagesCours Schéma Norme Et Ins Dom Rades - Docx - Google DocsThe Gentleman TacoPas encore d'évaluation
- 12 - Le Schéma Cinématique MinimaleDocument31 pages12 - Le Schéma Cinématique MinimaleMahmoud Moncef100% (2)
- 21 - Le Schéma Cinématique MinimaleDocument22 pages21 - Le Schéma Cinématique MinimaleManal El Matmour M'hairPas encore d'évaluation
- 13 - Exemple Schéma Cinématique Serre-JointDocument16 pages13 - Exemple Schéma Cinématique Serre-JointMOHAMED TAMZAITIPas encore d'évaluation
- LIAISONS Et Schematisation Et TorseursDocument16 pagesLIAISONS Et Schematisation Et TorseursHassanbfk BfkPas encore d'évaluation
- Chapitre 2Document10 pagesChapitre 2skaachPas encore d'évaluation
- Cours CT 1 Schematisation CinematiqueDocument5 pagesCours CT 1 Schematisation CinematiquePascal PonzoniPas encore d'évaluation
- Chap 1. Modelisation Des LiaisonsDocument5 pagesChap 1. Modelisation Des LiaisonsIbrahim ManganePas encore d'évaluation
- Sciences de L'ingénieurDocument2 pagesSciences de L'ingénieurGuy YgalPas encore d'évaluation
- Liaisons CinématiquesDocument7 pagesLiaisons Cinématiquesildjs.bjrfgPas encore d'évaluation
- TP6ou4ou5 Vérin ParaboleDocument5 pagesTP6ou4ou5 Vérin ParaboleWoupidos 天Pas encore d'évaluation
- Shéma Cinématique 1LEM PDFDocument43 pagesShéma Cinématique 1LEM PDFThe AHM 1Pas encore d'évaluation
- Shéma Cinématique 1LEMDocument35 pagesShéma Cinématique 1LEMilyesse chouchenePas encore d'évaluation
- 2 Chapitre2 Modelisation Des MécanismesDocument9 pages2 Chapitre2 Modelisation Des Mécanismesmohammed belhadj kelkal100% (1)
- Exercices Schéma CinématiqueDocument13 pagesExercices Schéma CinématiqueHajar Ben GaraâPas encore d'évaluation
- Support de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun Système PDFDocument8 pagesSupport de Cours CHAPITRE II Modèle Mathématique Schéma Bloc Dun Système PDFTahrat ToufikPas encore d'évaluation
- CoursDocument61 pagesCoursBen Aissa ChokriPas encore d'évaluation
- Cours Modèl Liaison AjustementsDocument70 pagesCours Modèl Liaison AjustementssawadogoPas encore d'évaluation
- 12 - Modélisation Cinématique Des MécanismesDocument25 pages12 - Modélisation Cinématique Des MécanismesManal El Matmour M'hairPas encore d'évaluation
- Modelisation Mécanismes 2020Document22 pagesModelisation Mécanismes 2020Mathis DintrichPas encore d'évaluation
- Si Co08 MMC EfDocument21 pagesSi Co08 MMC EfBrahim AchayfadPas encore d'évaluation
- Modélisation Géométrique Des LiaisonsDocument12 pagesModélisation Géométrique Des LiaisonsKarima HamdanPas encore d'évaluation
- Technologie Construction2Document34 pagesTechnologie Construction2Ben Aissa Chokri100% (1)
- TP 02 Syst Lin Ass S4 Auto.1Document4 pagesTP 02 Syst Lin Ass S4 Auto.1moussaab yousfiPas encore d'évaluation
- C1 Modelisation Des MecanismesDocument6 pagesC1 Modelisation Des MecanismesOMAR ENNAJIPas encore d'évaluation
- Schéma Norme Et Ins DomDocument66 pagesSchéma Norme Et Ins DomMehdi TraouliPas encore d'évaluation
- Chapitre 1Document6 pagesChapitre 1ademtalbi554Pas encore d'évaluation
- Schéma Cinématique Serre-Joint - PpsDocument25 pagesSchéma Cinématique Serre-Joint - PpsErica Franco50% (4)
- Representation Des ProduitsDocument12 pagesRepresentation Des ProduitsHAJAR HAFIDPas encore d'évaluation
- Théorie Des Mécanismes L3Document15 pagesThéorie Des Mécanismes L3Shake SpearePas encore d'évaluation
- 03 A - Modélisation Des Liaisons 2Document7 pages03 A - Modélisation Des Liaisons 2Keziah MustunPas encore d'évaluation
- ELT-FLY-BT-CC-003 v1-01Document42 pagesELT-FLY-BT-CC-003 v1-01BelaliaPas encore d'évaluation
- Schema Et Normes 1Document12 pagesSchema Et Normes 1mimicharonneaminaPas encore d'évaluation
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDocument11 pagesChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaPas encore d'évaluation
- Automatique Chapitre2Document46 pagesAutomatique Chapitre2Khalifa BakkarPas encore d'évaluation
- Solution TD5-MA PDFDocument4 pagesSolution TD5-MA PDFYasser NapoliPas encore d'évaluation
- Chapitre - 2 Les - Assemblages - Filetes L3CM S5 2023 PDFDocument35 pagesChapitre - 2 Les - Assemblages - Filetes L3CM S5 2023 PDFYasser NapoliPas encore d'évaluation
- Chapitre 1 PDFDocument7 pagesChapitre 1 PDFYasser NapoliPas encore d'évaluation
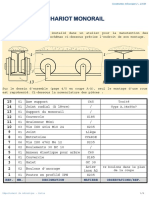
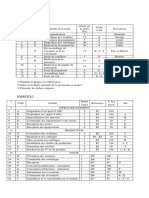
- CH4 - Application - Chariot Monorail PDFDocument5 pagesCH4 - Application - Chariot Monorail PDFYasser Napoli100% (1)
- Le Marketing BancaireDocument4 pagesLe Marketing BancaireLoubna MarocPas encore d'évaluation
- Describtion Technologique Des Fours4Document8 pagesDescribtion Technologique Des Fours4salah meGuenniPas encore d'évaluation
- TP - Ms ProjectDocument3 pagesTP - Ms ProjectArthur OuattaraPas encore d'évaluation
- Réglement Intérieur ISM 2018-2019Document1 pageRéglement Intérieur ISM 2018-2019BELSPas encore d'évaluation
- Aon and AoaDocument18 pagesAon and AoaAhmed FrejPas encore d'évaluation
- Double Distributivite 2 CorrigeDocument3 pagesDouble Distributivite 2 CorrigeKantryPas encore d'évaluation
- Stereochimie Chim 201-05-06cDocument13 pagesStereochimie Chim 201-05-06cToumany FofanaPas encore d'évaluation
- LA GénéralDocument56 pagesLA Généralfotso kamgaPas encore d'évaluation
- Questionnaire QuickDocument2 pagesQuestionnaire QuickRédâ AminePas encore d'évaluation
- 001 TXT Deriv 2022Document10 pages001 TXT Deriv 2022Mat GrallPas encore d'évaluation
- TD1 HTML PDFDocument3 pagesTD1 HTML PDFAbdo ElmamounPas encore d'évaluation
- SMP S6 EII TDS El Amraoui Chapitre 6Document10 pagesSMP S6 EII TDS El Amraoui Chapitre 6Houssein EL GHARSPas encore d'évaluation
- Axlou Toth Pour L'innovation: Cours de Renforcement Ou À Domicile Maths-PC-SVT: 78.192.84.64-78.151.34.44Document3 pagesAxlou Toth Pour L'innovation: Cours de Renforcement Ou À Domicile Maths-PC-SVT: 78.192.84.64-78.151.34.44yayaPas encore d'évaluation
- RhamnaDocument168 pagesRhamnalabofor sarlPas encore d'évaluation
- Histoire Des Congregations ReligieusesDocument31 pagesHistoire Des Congregations ReligieusesMarc Bozzo BatallaPas encore d'évaluation
- SimulationDocument5 pagesSimulationHoussem Eddine MereghniPas encore d'évaluation
- Cours Droit Penal Du Travail Cadre SynthetiqueDocument41 pagesCours Droit Penal Du Travail Cadre SynthetiqueAragsan HousseinPas encore d'évaluation
- French Polishing MethodeDocument35 pagesFrench Polishing MethodeJobePas encore d'évaluation
- Dossier de CandidatureDocument3 pagesDossier de CandidatureWá LîdPas encore d'évaluation
- BossuetDocument21 pagesBossuetLISBONNEPas encore d'évaluation
- Gestion Budgetaire DevoirDocument5 pagesGestion Budgetaire DevoirVictoire OnanenaPas encore d'évaluation
- 1moiscrosstrain PhilDocument31 pages1moiscrosstrain PhilNikoPas encore d'évaluation
- Present Simple RappelDocument8 pagesPresent Simple RappelYousra BadPas encore d'évaluation
- 2013ADODocument42 pages2013ADOZikasELPas encore d'évaluation
- MINPOSTEL Rapport NGUENADocument74 pagesMINPOSTEL Rapport NGUENASimonet NguenaPas encore d'évaluation