Vous aimerez peut-être aussi
- Cahier de Mathématique TSE Tome 1Document137 pagesCahier de Mathématique TSE Tome 1mohamedismaelmaiga2000100% (1)
- ProgDocument5 pagesProganon-633558Pas encore d'évaluation
- Programme Tle CeDocument9 pagesProgramme Tle CeTOPASOPas encore d'évaluation
- FDM 2Document1 pageFDM 2Nouh NahnouhPas encore d'évaluation
- Progression Tles Pro GPT A Et B-2023-2024 IPN-IGSDocument7 pagesProgression Tles Pro GPT A Et B-2023-2024 IPN-IGSNZOKOU ABAGHA VIVIENPas encore d'évaluation
- Progression Bac Pro Terminale Groupe B-1Document4 pagesProgression Bac Pro Terminale Groupe B-1Foto KovilPas encore d'évaluation
- Progression Tle C-Tle SI - 2023 - 2024-IPN-IGS RDocument9 pagesProgression Tle C-Tle SI - 2023 - 2024-IPN-IGS RRaïssa Avorebang obiangPas encore d'évaluation
- 2018 02 Programme Technicien Geometre Cadastre ExterneDocument4 pages2018 02 Programme Technicien Geometre Cadastre ExterneB. asmaPas encore d'évaluation
- ProgpremDocument38 pagesProgpremLevier PoidsPas encore d'évaluation
- Algèbre Et Analyse Classes Terminales C D Et T Nathan 1967Document380 pagesAlgèbre Et Analyse Classes Terminales C D Et T Nathan 1967ben TATI100% (1)
- Dm1 Ecs2 Vacances 1920Document9 pagesDm1 Ecs2 Vacances 1920NoahPas encore d'évaluation
- Programme Mathematiques BTS CPIDocument8 pagesProgramme Mathematiques BTS CPIFranck YvesPas encore d'évaluation
- PRG 23Document2 pagesPRG 23samir talssiPas encore d'évaluation
- Chapitre 3. Fonctions Numériques - TSE-2Document129 pagesChapitre 3. Fonctions Numériques - TSE-2Moh PotePas encore d'évaluation
- Programme Maths MPSIDocument9 pagesProgramme Maths MPSIAdrien BienvenuPas encore d'évaluation
- Prog Col 2tsi 2324 C02Document1 pageProg Col 2tsi 2324 C02Yaniss RadiPas encore d'évaluation
- UA Terminale Sces EXACTSDocument7 pagesUA Terminale Sces EXACTSToumany FofanaPas encore d'évaluation
- Maths MPSIDocument27 pagesMaths MPSIErrol LcqPas encore d'évaluation
- Lebossé, Hémery, Algèbre Et Notions D'analyse, 1re C (1966)Document336 pagesLebossé, Hémery, Algèbre Et Notions D'analyse, 1re C (1966)Manu The Ancient86% (7)
- Fonction de Plusieurs Variables - WikipédiaDocument8 pagesFonction de Plusieurs Variables - WikipédiaJason RiverPas encore d'évaluation
- PelletDocument44 pagesPelletGuy DagnyPas encore d'évaluation
- Prog SecDocument34 pagesProg SecIdrissa KouyatéPas encore d'évaluation
- Poly SiteDocument114 pagesPoly SiteKhmer ChamPas encore d'évaluation
- Progression 1eres Pro GPT A Et B-2023-2024 IPN-IGSDocument6 pagesProgression 1eres Pro GPT A Et B-2023-2024 IPN-IGSNZOKOU ABAGHA VIVIENPas encore d'évaluation
- Progmaths AgregaDocument11 pagesProgmaths AgregaHaytem bossPas encore d'évaluation
- 1 Cours 1Document32 pages1 Cours 1Yahya LahmarPas encore d'évaluation
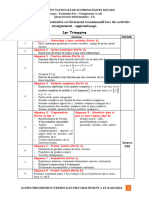
- Programme TSEDocument7 pagesProgramme TSEkirladjoPas encore d'évaluation
- Mathématiques - Connaissances Recommandées (Polytechnique)Document3 pagesMathématiques - Connaissances Recommandées (Polytechnique)S A BPas encore d'évaluation
- Mathématiques Tle ADocument82 pagesMathématiques Tle AMahama KaborePas encore d'évaluation
- 0 Rappels Mathématiques - Interractions Entre Charges Au ReposDocument44 pages0 Rappels Mathématiques - Interractions Entre Charges Au ReposMed AithidaPas encore d'évaluation
- p2018 Agreg Ext Math 759593Document14 pagesp2018 Agreg Ext Math 759593messiPas encore d'évaluation
- Untitled 2Document6 pagesUntitled 2amine aminePas encore d'évaluation
- Semaine 17Document2 pagesSemaine 17thomas.lgfc2Pas encore d'évaluation
- Un Précis Succint Sur Les Fonctions À Deux Variables: Proposé:Bekkali, MohamedDocument45 pagesUn Précis Succint Sur Les Fonctions À Deux Variables: Proposé:Bekkali, MohamedYassine MssissiPas encore d'évaluation
- ResumesDocument202 pagesResumescyrinekrichen24Pas encore d'évaluation
- Pogression Tles Sti STL 2022 2023 Ipn IgsDocument3 pagesPogression Tles Sti STL 2022 2023 Ipn IgsAlex ViwassiPas encore d'évaluation
- Methode Monte CarloDocument6 pagesMethode Monte CarloSFIA AGHOURIPas encore d'évaluation
- Fiche Méthode - BAC Mathématiques PDFDocument33 pagesFiche Méthode - BAC Mathématiques PDFMeilt MaroarPas encore d'évaluation
- MATHEMATIQUES t1Document11 pagesMATHEMATIQUES t1hamzamami516Pas encore d'évaluation
- Math Tle S2 Et S4Document10 pagesMath Tle S2 Et S4Déthié DionePas encore d'évaluation
- Matlab2011 Tp6correcDocument10 pagesMatlab2011 Tp6correcAbdallah ToolmakerPas encore d'évaluation
- Chapitre 8 Analyse FonctionnelleDocument36 pagesChapitre 8 Analyse FonctionnelleKOUAKOU YAH MARDOCHEEPas encore d'évaluation
- Colle 03Document1 pageColle 03NOUREDDINE OUSAIDPas encore d'évaluation
- 01-1 - Revisions D Analyse Notes de CoursDocument16 pages01-1 - Revisions D Analyse Notes de CoursAlpha issiaga DialloPas encore d'évaluation
- Dev Maison 1 PDFDocument2 pagesDev Maison 1 PDFsamvip100% (1)
- MemoireDocument24 pagesMemoireJoel WangyangPas encore d'évaluation
- IntégrationDocument12 pagesIntégrationAZPas encore d'évaluation
- Chapitre 1 Notes de Cours 2018Document34 pagesChapitre 1 Notes de Cours 2018Alex LefebvrePas encore d'évaluation
- Bestcours Examen-Blanc-4Document4 pagesBestcours Examen-Blanc-4othmane el fakhouriPas encore d'évaluation
- Analyse 4Document103 pagesAnalyse 4HAMZA SABBARPas encore d'évaluation
- TC 2020 Allégé 1CDocument2 pagesTC 2020 Allégé 1CibxxxPas encore d'évaluation
- Document 2Document2 pagesDocument 2Charles Deprince AmoakonPas encore d'évaluation
- Cours Analyse 2 PDFDocument32 pagesCours Analyse 2 PDFDriss El HadaouiPas encore d'évaluation
- Cours Meth Math 1 L2Document118 pagesCours Meth Math 1 L2Bvmbv SenePas encore d'évaluation
- Etude de Fonction Ts2 Partie 1.1Document141 pagesEtude de Fonction Ts2 Partie 1.1Youssoupha DIAGNEPas encore d'évaluation
- Outils Mathématique Pour PhysiqueDocument22 pagesOutils Mathématique Pour Physiqueabdelouahab bouchama100% (1)
- p2022 Agreg Ext Mathematiques 1402337Document12 pagesp2022 Agreg Ext Mathematiques 1402337Jean HurtePas encore d'évaluation
- 91 Calcul IntegralDocument4 pages91 Calcul IntegralIlham AMANSAGPas encore d'évaluation
- ProgressionDocument7 pagesProgressionHarry Posteur2Pas encore d'évaluation
- Resume Exponentielle PDFDocument2 pagesResume Exponentielle PDFHarry Posteur2Pas encore d'évaluation
- 1978 Orleans ToursDocument2 pages1978 Orleans ToursHarry Posteur2Pas encore d'évaluation
- Nouveau Document TexteDocument9 pagesNouveau Document TexteHarry Posteur2Pas encore d'évaluation
- 20 Integ T1Document11 pages20 Integ T1Harry Posteur2Pas encore d'évaluation
- Nouveau Document TexteDocument3 pagesNouveau Document TexteHarry Posteur2Pas encore d'évaluation
- Nouveau Document TexteDocument5 pagesNouveau Document TexteHarry Posteur2Pas encore d'évaluation
- Nouveau Document TexteDocument3 pagesNouveau Document TexteHarry Posteur2Pas encore d'évaluation
- Nouveau Document TexteDocument2 pagesNouveau Document TexteHarry Posteur2Pas encore d'évaluation
- Lantschoot, Arnold Van. Un Texte Palimpseste de Vat. Copte 65, Muséon 60 (1947), 261-268Document8 pagesLantschoot, Arnold Van. Un Texte Palimpseste de Vat. Copte 65, Muséon 60 (1947), 261-268yadatanPas encore d'évaluation
- EchographieDocument10 pagesEchographieImaa Ha NnePas encore d'évaluation
- TD PalettisationDocument12 pagesTD PalettisationZine eddine Hadj mokhnachrPas encore d'évaluation
- Wayser2009 2Document25 pagesWayser2009 2ALEXANDRE F VOLTAPas encore d'évaluation
- 17M110hhhhhh PDFDocument101 pages17M110hhhhhh PDFilham haniniPas encore d'évaluation
- Robe Salopette CatherineDocument57 pagesRobe Salopette CatherineAude EPIARD100% (1)
- Picardie Cerfa 11415-2Document3 pagesPicardie Cerfa 11415-2vanessa.roch1819Pas encore d'évaluation
- Pied Au PlancherDocument2 pagesPied Au PlancherKenza BenmokhtarPas encore d'évaluation
- Bac - Les Meilleures Citations Pour Gagner Des Points en Français - SAMABACDocument4 pagesBac - Les Meilleures Citations Pour Gagner Des Points en Français - SAMABACbeavoguipaulbarre047Pas encore d'évaluation
- Manuel D'utilisation Gamme Murale Ar5000 1.1 Samsung 2014Document57 pagesManuel D'utilisation Gamme Murale Ar5000 1.1 Samsung 2014ddrumeaPas encore d'évaluation
- Les Vrais Secrets de La Magie NoireDocument113 pagesLes Vrais Secrets de La Magie NoireKawtar Gloom GOthside ൃ100% (1)
- Les Courants LitterairesDocument2 pagesLes Courants LitterairesAna-Maria RoșuPas encore d'évaluation
- Corro Philo Valesse 1iere - PDFDocument114 pagesCorro Philo Valesse 1iere - PDFnayoussayacoubou17Pas encore d'évaluation
- Regarder Le Tresor Du Petit Nicolas Entier VFDocument4 pagesRegarder Le Tresor Du Petit Nicolas Entier VFxzcvxzPas encore d'évaluation
- Chapitre5 DHCPDocument17 pagesChapitre5 DHCPjeanPas encore d'évaluation
- Niveaux Langue Registres Exercices PDFDocument4 pagesNiveaux Langue Registres Exercices PDFSadek Kadda Wahid0% (1)
- Gestion Du Temps KaufDocument44 pagesGestion Du Temps KaufHodaPas encore d'évaluation
- Yadh Ben AchourDocument26 pagesYadh Ben AchourIsmail SadaouiPas encore d'évaluation
- Qui A Inventé L'aiguille CreuseDocument4 pagesQui A Inventé L'aiguille CreusejewelgoodremPas encore d'évaluation
- Met S 23 Sy PDocument4 pagesMet S 23 Sy Pkhocine100% (1)
- Les Maladies de Dépérissement Des AgrumesDocument48 pagesLes Maladies de Dépérissement Des AgrumesMichelAndriamahazonoroRaherimanantsoaPas encore d'évaluation
- 3718 v2 Planchers Nervurs Poutrelles Prfa Associes Du Bton Coul en OeuvreDocument98 pages3718 v2 Planchers Nervurs Poutrelles Prfa Associes Du Bton Coul en OeuvreZizouk FeresPas encore d'évaluation
- Anelise TalbourdeauDocument9 pagesAnelise TalbourdeauDennis AlexanderPas encore d'évaluation
- Repercussion Islam Ames Hamad1Document15 pagesRepercussion Islam Ames Hamad1saydou bokotaPas encore d'évaluation
- SubnettingDocument19 pagesSubnettingtunisianouPas encore d'évaluation
- Chimie GeneraleDocument5 pagesChimie Generaletcheva jokhanan TiambiPas encore d'évaluation
- Etude Typologique de L'expression de L'espaceDocument41 pagesEtude Typologique de L'expression de L'espacevj03ePas encore d'évaluation
- TABLEAU EDEN ROCK - XLSX 2 VILLADocument20 pagesTABLEAU EDEN ROCK - XLSX 2 VILLARebs RebsPas encore d'évaluation
- Comptabilité Des CliniquesDocument47 pagesComptabilité Des CliniquesAnonymous kAVA6ALXNPas encore d'évaluation
- Mécanique Des RochesDocument41 pagesMécanique Des RochesIssam ZougariPas encore d'évaluation