Vous aimerez peut-être aussi
- Evaluation Liaison Encastrement EleveDocument4 pagesEvaluation Liaison Encastrement EleveeslochPas encore d'évaluation
- ANA TD01 - Ingénierie SystèmeDocument8 pagesANA TD01 - Ingénierie Systèmebijhou mcPas encore d'évaluation
- CI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeDocument2 pagesCI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- Cours 1Document13 pagesCours 1Jonathan BataillePas encore d'évaluation
- Ge Esa 2018Document16 pagesGe Esa 2018othmane mrichPas encore d'évaluation
- Exercice Chape Dessin CoteDocument2 pagesExercice Chape Dessin CoteABDELHAKIMPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - Positionneur de Parabole - 1ère AS (2015-2016) MR RAOUAFI - Abdallahsarra.benhlimaPas encore d'évaluation
- Moindres CarresDocument25 pagesMoindres CarresBoulehmi NizarPas encore d'évaluation
- Devoir de Controle N3-1AS-2014-Blocage Des TubesDocument3 pagesDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrPas encore d'évaluation
- CI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeDocument8 pagesCI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie Alarme - 2ème Sciences (2011-2012) MR Amjed SaddemDocument4 pagesDevoir de Contrôle N°2 - Technologie Alarme - 2ème Sciences (2011-2012) MR Amjed SaddemRouaissi RidhaPas encore d'évaluation
- Cahier 1AS 2019 v3Document65 pagesCahier 1AS 2019 v3Amar SaadiPas encore d'évaluation
- Trans MettreDocument80 pagesTrans MettreEssaid AjanaPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- TD Combinatoire TsiDocument5 pagesTD Combinatoire TsikamalPas encore d'évaluation
- TP Forces Dynamometre Élève Anh TânDocument6 pagesTP Forces Dynamometre Élève Anh TânWhavoPas encore d'évaluation
- TD2 Statique Graphique Abri RERDocument2 pagesTD2 Statique Graphique Abri RERSylla BoyzPas encore d'évaluation
- Correction-Dessin de Définition PDFDocument14 pagesCorrection-Dessin de Définition PDFmohamed sedki chebbiPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariDocument5 pagesDevoir de Synthèse N°1 - Génie Électrique - 3ème Technique (2012-2013) MR KhiariAbidi NawresPas encore d'évaluation
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouPas encore d'évaluation
- امتحان علوم المهندسDocument12 pagesامتحان علوم المهندسMoradLeglilPas encore d'évaluation
- TD 29 Corrigé - Arc-BoutementDocument8 pagesTD 29 Corrigé - Arc-BoutementMohamed AbaakilPas encore d'évaluation
- DS2.3 ST - DTDocument6 pagesDS2.3 ST - DTBouabdellaoui saif ennasrPas encore d'évaluation
- GSA 2AC 1920 S1 C3 MathsDocument2 pagesGSA 2AC 1920 S1 C3 MathsSaidPas encore d'évaluation
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument4 pagesDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenPas encore d'évaluation
- Devoir de Synthese N3-1°as PDFDocument6 pagesDevoir de Synthese N3-1°as PDFWalid BhyPas encore d'évaluation
- TD Systèmes ArticulésDocument6 pagesTD Systèmes ArticulésAya El RhayourPas encore d'évaluation
- Epreuve de Mecanique Appliquee Pf1Document1 pageEpreuve de Mecanique Appliquee Pf1ESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Procedes D'asemblageDocument85 pagesProcedes D'asemblageImed SeghierPas encore d'évaluation
- Connaissance Chaine EnergieDocument2 pagesConnaissance Chaine Energieamri mohamedPas encore d'évaluation
- Corrigé Afs2016Document6 pagesCorrigé Afs2016Ibrahim Êl BæzPas encore d'évaluation
- DEVOIR Porte de GarageDocument5 pagesDEVOIR Porte de GarageSaïd Oumar GbanePas encore d'évaluation
- Devoir de Controle N°2: Systemede DecoupageDocument3 pagesDevoir de Controle N°2: Systemede DecoupageElafif HamdiPas encore d'évaluation
- Devoir de Contrôle N°1 - Génie Électrique - Bac TechniqueDocument7 pagesDevoir de Contrôle N°1 - Génie Électrique - Bac TechniqueAlaeddine Ben HassenPas encore d'évaluation
- 1 DS de Statique Graphique Et Analytique - PelleteuseDocument4 pages1 DS de Statique Graphique Et Analytique - PelleteuseMohamed NaciriPas encore d'évaluation
- 208 Prehenseur CorrigeDocument4 pages208 Prehenseur CorrigeAhmed TalsiPas encore d'évaluation
- Chap. III: Automate Programmable Industriel (API) : AutomatismeDocument27 pagesChap. III: Automate Programmable Industriel (API) : Automatismeimane elmamoune100% (1)
- TD NumeriqueDocument7 pagesTD Numeriqueahmed2012tn100% (1)
- DT Perforateur REXELDocument16 pagesDT Perforateur REXELdianecortadesPas encore d'évaluation
- CC3 2ste3 - 2018 2019Document6 pagesCC3 2ste3 - 2018 2019ESSOME ESSOME OLIVIER STEPHANEPas encore d'évaluation
- Corrige Questions Mecanique BisDocument8 pagesCorrige Questions Mecanique BisSidi RachPas encore d'évaluation
- DP Elec 13 - 14Document4 pagesDP Elec 13 - 14Elafif HamdiPas encore d'évaluation
- SujetDocument28 pagesSujetbargo90Pas encore d'évaluation
- Formulaire STI2DDocument4 pagesFormulaire STI2DAmélie DuboisPas encore d'évaluation
- Commandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnDocument7 pagesCommandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnYoussef YouriPas encore d'évaluation
- CH 2 Dessin D'ensemble 2022Document4 pagesCH 2 Dessin D'ensemble 2022Tarek AyariPas encore d'évaluation
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- Devoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenDocument7 pagesDevoir de Contrôle N°3 2ème Semestre - Génie Mécanique - UNITE DE PRODUCTION DU TSP - Bac Technique (2018-2019) MR Bakini NoomenYasmine SolenePas encore d'évaluation
- PhA ESA 2018Document8 pagesPhA ESA 2018othmane mrichPas encore d'évaluation
- DS1 1Document11 pagesDS1 1Wissal GuilloulPas encore d'évaluation
- Etau Orientable PDFDocument6 pagesEtau Orientable PDFTALMOUDI HEDIAPas encore d'évaluation
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A PetrolesallsmartPas encore d'évaluation
- Progr WAMBA + Plan TECHNO CONST-2019-2020Document4 pagesProgr WAMBA + Plan TECHNO CONST-2019-2020Christian NoelPas encore d'évaluation
- Formulaire STI2DDocument4 pagesFormulaire STI2Dapi34100% (1)
- (PDF) Maintenance Et Réparation D'un Tour Parallèle - Islam Guezaout - Academia - EduDocument114 pages(PDF) Maintenance Et Réparation D'un Tour Parallèle - Islam Guezaout - Academia - EduSalim DoumbiaPas encore d'évaluation
- TD 2 Liaisons Schéma CinématiqueDocument6 pagesTD 2 Liaisons Schéma CinématiqueNadhir MehellouPas encore d'évaluation
- 1ère TSI 15-16 (DOC ELEVE')Document154 pages1ère TSI 15-16 (DOC ELEVE')immane.imPas encore d'évaluation
- TD SUPPORT PRDocument2 pagesTD SUPPORT PRmasteratsiiPas encore d'évaluation
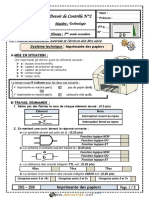
- Devoir de Contrôle N°2 - Technologie - Imprimante Des Papiers - 1ère AS (2015-2016) MR RAOUAFI - AbdallahDocument3 pagesDevoir de Contrôle N°2 - Technologie - Imprimante Des Papiers - 1ère AS (2015-2016) MR RAOUAFI - AbdallahChihab GhlalaPas encore d'évaluation
- Etude Cinematique Du Etude Cinematique Du Cric Electrique Cric ElectriqueDocument4 pagesEtude Cinematique Du Etude Cinematique Du Cric Electrique Cric Electriquemmnlbrice67% (3)
- TP Forces Dynamometre Élève Anh TânDocument6 pagesTP Forces Dynamometre Élève Anh TânWhavoPas encore d'évaluation
- Jean-Pierre Gousset - Dessin Technique Et Lecture de Plan. Principes - Exercices. Série Technique Des Dessins Du Bâtiment. (2012, Eyrolles)Document33 pagesJean-Pierre Gousset - Dessin Technique Et Lecture de Plan. Principes - Exercices. Série Technique Des Dessins Du Bâtiment. (2012, Eyrolles)ELFargaliMohamedPas encore d'évaluation
- TD Béquille Premiere FaitDocument7 pagesTD Béquille Premiere FaitWhavoPas encore d'évaluation
- Principe Fondamental de La StatiquefaitDocument4 pagesPrincipe Fondamental de La StatiquefaitWhavoPas encore d'évaluation
- InstallationDocument9 pagesInstallationfatihaPas encore d'évaluation
- SigmaDocument2 pagesSigmaAli KPas encore d'évaluation
- Aid Memoire XP 18-545Document2 pagesAid Memoire XP 18-545Lotfi Merabet75% (4)
- François Brune - La Vierge Du MexiqueDocument681 pagesFrançois Brune - La Vierge Du MexiquethanosPas encore d'évaluation
- Question Et Réponse 4Document15 pagesQuestion Et Réponse 4saraPas encore d'évaluation
- Guide Investir Dans Les PME en AfriqueDocument74 pagesGuide Investir Dans Les PME en AfriquePDG EYAFPas encore d'évaluation
- Practice+exam+chap+3 - 1 - 1Document7 pagesPractice+exam+chap+3 - 1 - 1Box OfficePas encore d'évaluation
- Guide de Logiciel Sap20000 CopierDocument54 pagesGuide de Logiciel Sap20000 CopierAbdou HababaPas encore d'évaluation
- Cour 1 - VirtualisationDocument24 pagesCour 1 - Virtualisationjeremie zehouPas encore d'évaluation
- T.D. N°2 - Les AmortissementsDocument3 pagesT.D. N°2 - Les Amortissementsangelinaa.bento05Pas encore d'évaluation
- Entretien Du Reseau D'Eclairage Public Au Sein de La CommuneDocument24 pagesEntretien Du Reseau D'Eclairage Public Au Sein de La CommuneMProd AmmoPas encore d'évaluation
- Document 1249Document11 pagesDocument 1249MrYodaaPas encore d'évaluation
- Audit Cycle VenteDocument38 pagesAudit Cycle VenteaminePas encore d'évaluation
- D61PXi MoniteurDocument38 pagesD61PXi MoniteurXavier FontainePas encore d'évaluation
- Gagner de L'argent Avec YoutubeDocument7 pagesGagner de L'argent Avec Youtubeanon_811149744Pas encore d'évaluation
- Réussir Aux Différentes Évaluations D'un Entretien Part 1Document30 pagesRéussir Aux Différentes Évaluations D'un Entretien Part 1Daniel Constant AttaPas encore d'évaluation
- 3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieDocument14 pages3eme Biochimie 2019-2020 Bouzidi A L3 Bioch Cours ToxicologieM.B. IsmailPas encore d'évaluation
- These ND PAreconf VF PDFDocument174 pagesThese ND PAreconf VF PDFRachid HamianiPas encore d'évaluation
- Déformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueDocument11 pagesDéformé D'un Portique Bi-Encastré: Câble de Branchement Câbles Vers Les Appuis Du PortiqueFarahBoughanmiPas encore d'évaluation
- T 200 IDocument36 pagesT 200 Iref100% (1)
- RégimeDocument12 pagesRégimeernestito2010Pas encore d'évaluation
- Katalogs-19-Fusibles A Couteaux NHDocument8 pagesKatalogs-19-Fusibles A Couteaux NHhakimPas encore d'évaluation
- CONDUITE TP2 Avec Quadrillage (1) 2Document6 pagesCONDUITE TP2 Avec Quadrillage (1) 2Agbatou Jean Baptiste N'chiepoPas encore d'évaluation
- UM Operation Manual FRFR 27021611646554123Document299 pagesUM Operation Manual FRFR 27021611646554123Georges TaradauxPas encore d'évaluation
- UN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannDocument9 pagesUN ASPECT MÉCONNU D'AVALOKITEŚVARA - de MallmannClaudia RamassoPas encore d'évaluation
- Premier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsDocument4 pagesPremier Exercice: (7 Points) Chauffe-Eau Solaire: Lire Attentivement L'extrait Suivant Puis Répondre Aux QuestionsHouda ChanPas encore d'évaluation
- Mouteur DCDocument7 pagesMouteur DCElmokh LassaadPas encore d'évaluation
- Tome 2 Impacts EnvironnementauxDocument49 pagesTome 2 Impacts EnvironnementauxUlrich Ralph NjoyaPas encore d'évaluation
- Boc 20221230Document23 pagesBoc 20221230electronicsobed the son of GODPas encore d'évaluation
- Guide Satellite Clubs FRDocument4 pagesGuide Satellite Clubs FRsoufiane mrabetPas encore d'évaluation