Vous aimerez peut-être aussi
- Catalogue n1 Juin 2019 Avec HyperliensDocument146 pagesCatalogue n1 Juin 2019 Avec HyperliensThomas Thomas100% (1)
- Evaluation Construction MecaniqueDocument7 pagesEvaluation Construction MecaniqueHana WhbPas encore d'évaluation
- TD02 ConceptionDocument3 pagesTD02 ConceptionnadaPas encore d'évaluation
- Rapport Ouvrages D'artDocument44 pagesRapport Ouvrages D'artSoufian SabarPas encore d'évaluation
- 40.7 Safety Instrumented System (SIS)Document27 pages40.7 Safety Instrumented System (SIS)RabahPas encore d'évaluation
- Commande Des MCCDocument21 pagesCommande Des MCCAbdelmalike Bendjaafri100% (1)
- Generalites Sur Le Compresseur Alternatif A PistonDocument12 pagesGeneralites Sur Le Compresseur Alternatif A Pistonloic80% (5)
- I-Mise en Situation:: (Voir Livre de TP Page 19) ConclusionDocument3 pagesI-Mise en Situation:: (Voir Livre de TP Page 19) Conclusionhammamin2008Pas encore d'évaluation
- CH3 Montage Et Demontage Des Roulements PDFDocument10 pagesCH3 Montage Et Demontage Des Roulements PDFMbaira LeilaPas encore d'évaluation
- Sujet 4Document5 pagesSujet 4elie chanePas encore d'évaluation
- DC N°2 - 1ère - Unité de Percage Électromagnétique - 2020-2021Document3 pagesDC N°2 - 1ère - Unité de Percage Électromagnétique - 2020-2021Adam BensaidPas encore d'évaluation
- Analyse Fonctionnelle Solutions ConstrucDocument4 pagesAnalyse Fonctionnelle Solutions ConstrucRobert MartosPas encore d'évaluation
- Pliage Grafcet+LadderDocument7 pagesPliage Grafcet+LadderIlias EmsaPas encore d'évaluation
- Embrayages Frein 10 11 12Document8 pagesEmbrayages Frein 10 11 12Ah MédPas encore d'évaluation
- 1A Devoir de Synthèse N°2 - TM 2014Document6 pages1A Devoir de Synthèse N°2 - TM 2014Kamel TayahiPas encore d'évaluation
- Travaux Dirigés en PneumatiqueDocument6 pagesTravaux Dirigés en PneumatiqueLoloPas encore d'évaluation
- Presentation Picos18Document22 pagesPresentation Picos18Saf Bes100% (1)
- TD EmbDocument5 pagesTD EmbFARES Naoufel100% (1)
- Grafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesDocument8 pagesGrafcet: Animation de Grafcets Avec Séquences Et Alternées Et SimultanéesAFADPas encore d'évaluation
- Commandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnDocument7 pagesCommandées Chacun Par Un Distributeur 5/2 À Pilotage Électrique) - OnYoussef YouriPas encore d'évaluation
- Poste D'agraffage Des Caisses (Corrigé)Document3 pagesPoste D'agraffage Des Caisses (Corrigé)Raoudha Kaabi Ep Mrabet100% (1)
- Technologie UNITE DE BOUCHAGE DES BOUTEILLES DE LAIT - 2ème Sciences (2011-2012) MR Walid (Full Permission)Document5 pagesTechnologie UNITE DE BOUCHAGE DES BOUTEILLES DE LAIT - 2ème Sciences (2011-2012) MR Walid (Full Permission)Kamel TayahiPas encore d'évaluation
- Construction Des LiaisonsDocument64 pagesConstruction Des LiaisonsFethi KoualaPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Exercices Hydraulique PratiqueDocument5 pagesExercices Hydraulique PratiqueSalah Eddine SebbarPas encore d'évaluation
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- Ge Esa 1Document6 pagesGe Esa 1othmane mrichPas encore d'évaluation
- PhA ESA 2018Document8 pagesPhA ESA 2018othmane mrichPas encore d'évaluation
- Systeme Automatique 2018Document13 pagesSysteme Automatique 2018Habibe-eddine MahmouchePas encore d'évaluation
- TD Conception2 - RévisionDocument6 pagesTD Conception2 - RévisionBokou KhalfaPas encore d'évaluation
- Activité Semelles ConnectéesDocument7 pagesActivité Semelles Connectéesdahech hichemPas encore d'évaluation
- Visserie Et BoulonnerieDocument3 pagesVisserie Et BoulonnerieTresor SafouPas encore d'évaluation
- Reducteur A Vis Sans FinDocument18 pagesReducteur A Vis Sans FinImane ElkhoukhPas encore d'évaluation
- TD 1 Hypothe - Ses de La Re - Sistance Des Mate - Riaux - CopieDocument1 pageTD 1 Hypothe - Ses de La Re - Sistance Des Mate - Riaux - CopieRachid TopPas encore d'évaluation
- Cours Machines Spéciales 2020Document18 pagesCours Machines Spéciales 2020Hadil SellamiPas encore d'évaluation
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriPas encore d'évaluation
- Capteurs Mecanique ProfDocument7 pagesCapteurs Mecanique ProfAbidi YoussefPas encore d'évaluation
- Examen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFDocument9 pagesExamen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFmabroukPas encore d'évaluation
- DS1 - DT - Cellule Flexible D'usinageDocument4 pagesDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- Exercice Etau Pour MVDocument2 pagesExercice Etau Pour MVYoussef YouriPas encore d'évaluation
- Chapitre 4Document6 pagesChapitre 4OnésimePas encore d'évaluation
- COURS SADT eDocument2 pagesCOURS SADT eMustafa MoussaouiPas encore d'évaluation
- Annalyse Fonctionnelle: SADT 2Document12 pagesAnnalyse Fonctionnelle: SADT 2Aya El KoussamiPas encore d'évaluation
- Tp7 Freinage Machine Asynchrone Injection Courant ContinuDocument5 pagesTp7 Freinage Machine Asynchrone Injection Courant Continudavsou100% (1)
- Efforts Et Puisance de CoupeDocument7 pagesEfforts Et Puisance de CoupeAnouarPas encore d'évaluation
- Rapport de TP de MecaniqueDocument8 pagesRapport de TP de MecaniqueHenry JOSIASPas encore d'évaluation
- M25 Dépannage Des Compresseurs Et de Moteurs Pneumatiques - 112706Document14 pagesM25 Dépannage Des Compresseurs Et de Moteurs Pneumatiques - 112706mohamed toumiPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Accouplement GénéralitésDocument4 pagesAccouplement GénéralitésmatozoPas encore d'évaluation
- TP Verin Double Tige EleveDocument7 pagesTP Verin Double Tige EleveJawher SalemPas encore d'évaluation
- Rapport de Mini Projet DDocument17 pagesRapport de Mini Projet DOumar TraoréPas encore d'évaluation
- Statique GraphiqueDocument3 pagesStatique Graphiquesallsmart100% (1)
- CR AytomgneDocument13 pagesCR AytomgneMhB SaAdPas encore d'évaluation
- Tribologie MasterDocument15 pagesTribologie MasterabderazakPas encore d'évaluation
- 9 5 TD 3 Sujet PDFDocument3 pages9 5 TD 3 Sujet PDFMohamed MohamedPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
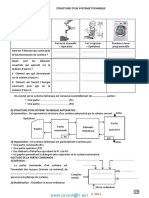
- Structure D'un Système TechniqueDocument4 pagesStructure D'un Système TechniqueAyme HemmemiPas encore d'évaluation
- Cours Lycée Pilote - Technologie La Structure D'un Système Technique - 1ère AS (2014-2015) MR Rafik Ben AmorDocument8 pagesCours Lycée Pilote - Technologie La Structure D'un Système Technique - 1ère AS (2014-2015) MR Rafik Ben AmorHamid RebaiPas encore d'évaluation
- Structure Un Système TechniqueDocument5 pagesStructure Un Système TechniqueMarouen MekkiPas encore d'évaluation
- Cours - Technologie Représentation Fonctionnelle D'un Système Technique - 1ère As (2014-2015) MR Rafik Ben AmorDocument4 pagesCours - Technologie Représentation Fonctionnelle D'un Système Technique - 1ère As (2014-2015) MR Rafik Ben AmorFaïssolath AchirouPas encore d'évaluation
- Analyse Fonctionnelle InterneDocument4 pagesAnalyse Fonctionnelle InterneNeji HmaniPas encore d'évaluation
- Ds 2 15-16Document4 pagesDs 2 15-16Otman Oto100% (1)
- Gestion D'un Passage À NiveauDocument6 pagesGestion D'un Passage À NiveauSalim El MarikyPas encore d'évaluation
- Partie4 JSFDocument11 pagesPartie4 JSFNouha MhadhbiPas encore d'évaluation
- Antidemarrage Renault - 2008Document148 pagesAntidemarrage Renault - 2008Ali KadourPas encore d'évaluation
- Isc-Dhcp-Server (Wiki Ubuntu-Fr)Document9 pagesIsc-Dhcp-Server (Wiki Ubuntu-Fr)Promote PlatformPas encore d'évaluation
- La Dematerialisation ImpDocument45 pagesLa Dematerialisation Impsoukaina El FarjaniPas encore d'évaluation
- Flygt CLS FLS FLS10 MINICAS 2Document12 pagesFlygt CLS FLS FLS10 MINICAS 2Lucas RibasPas encore d'évaluation
- Liste Des Exposés Attribués-Information Et Communication L3Document5 pagesListe Des Exposés Attribués-Information Et Communication L3millanPas encore d'évaluation
- 04 Reduction CorrigeDocument18 pages04 Reduction Corrigeamine zzaouiPas encore d'évaluation
- Facture 710540987 20160428Document5 pagesFacture 710540987 20160428Eric APas encore d'évaluation
- PCBTP TopographieDocument2 pagesPCBTP TopographieSkilz GPas encore d'évaluation
- CV ActualiséDocument2 pagesCV ActualiséMehdi SalhiPas encore d'évaluation
- MISSION 1 Decathlon 1 2Document11 pagesMISSION 1 Decathlon 1 2dc8vsbqt2hPas encore d'évaluation
- CH-Catalogue Plans de Maisons PDFDocument11 pagesCH-Catalogue Plans de Maisons PDFNidhal Ben MabroukPas encore d'évaluation
- Série D'exercices - Math - Activités Numériques (1) - 1ère AsDocument2 pagesSérie D'exercices - Math - Activités Numériques (1) - 1ère Asamal matmati100% (1)
- NF en Iso 12944-3 - 1998Document28 pagesNF en Iso 12944-3 - 1998Nassim Ben AbdeddayemPas encore d'évaluation
- Cahier D Ecriture Chiffres Gratuit A TelechargerDocument24 pagesCahier D Ecriture Chiffres Gratuit A Telechargerkammoun.informatiquePas encore d'évaluation
- Chapitre2 Introduction MongoDBDocument24 pagesChapitre2 Introduction MongoDBTEDx UniversitéCentralePas encore d'évaluation
- Fiche D'Inscription Pedagogique 2022-2023: Identification FormationDocument2 pagesFiche D'Inscription Pedagogique 2022-2023: Identification FormationDokrissa KAMINAPas encore d'évaluation
- PROJET EM P1 FISA 2020 2021 EnonceDocument4 pagesPROJET EM P1 FISA 2020 2021 EnoncePierre LesurPas encore d'évaluation
- M202 Temps CC2 V2 TSMFM 2022-2023Document2 pagesM202 Temps CC2 V2 TSMFM 2022-2023badr hadriPas encore d'évaluation
- MM KH15017003 Rev-ADocument16 pagesMM KH15017003 Rev-AJoendry ChirinosPas encore d'évaluation
- PPTX02-Environnement PowerpointDocument3 pagesPPTX02-Environnement PowerpointEddy SHANGAPas encore d'évaluation
- CH2 FaoDocument40 pagesCH2 FaoHadil SadokPas encore d'évaluation
- Algorithmes de Machine LearningDocument52 pagesAlgorithmes de Machine LearningNora Habrich100% (1)
- Béton RecycléDocument48 pagesBéton Recyclésa biPas encore d'évaluation