Vous aimerez peut-être aussi
- Optimisation de Flux Et D'espa - SAISSI Mouhcine - 3362 PDFDocument101 pagesOptimisation de Flux Et D'espa - SAISSI Mouhcine - 3362 PDFazipPas encore d'évaluation
- SX034a - Assemblage Boulonné D'une Cornière de Contreventement en Traction Sur Un GoussetDocument10 pagesSX034a - Assemblage Boulonné D'une Cornière de Contreventement en Traction Sur Un GoussetWissem TaktakPas encore d'évaluation
- Série DéversementDocument5 pagesSérie Déversementmomo algerienPas encore d'évaluation
- Ms - Chapitre 2Document9 pagesMs - Chapitre 2ToufikJalalEddinePas encore d'évaluation
- Chapitre 3 Caracteristiques Geometriques Des Sections-1Document29 pagesChapitre 3 Caracteristiques Geometriques Des Sections-1youbi aurelPas encore d'évaluation
- ENTP Cours RDM Niveau Universitaire Partie 2 PDFDocument55 pagesENTP Cours RDM Niveau Universitaire Partie 2 PDFSimplice Djouassi TiamPas encore d'évaluation
- Fiche TD N°02 + SolutionsDocument7 pagesFiche TD N°02 + SolutionsMébãrkį MH100% (1)
- CHAPITRE 08 POUTRE CONTINU ReviseDocument10 pagesCHAPITRE 08 POUTRE CONTINU ReviseRania Ben HassinePas encore d'évaluation
- Examen Béton ArméDocument10 pagesExamen Béton ArméboscoPas encore d'évaluation
- Calcul Des TraversesDocument13 pagesCalcul Des TraversesNdeye Marieme DiagnePas encore d'évaluation
- Beton Arme Cours Complet Chap10 PDFDocument6 pagesBeton Arme Cours Complet Chap10 PDFTOVIHO SessinouPas encore d'évaluation
- TP CDS (Portique)Document5 pagesTP CDS (Portique)lando de chancePas encore d'évaluation
- Correction RDMDocument14 pagesCorrection RDMAhmed RachdiPas encore d'évaluation
- Béton - Justification de La Resistance D'un Mur de Soutenement PDFDocument25 pagesBéton - Justification de La Resistance D'un Mur de Soutenement PDFS MPas encore d'évaluation
- EX StatiqueDocument41 pagesEX StatiqueSiraj ChahbounPas encore d'évaluation
- Chap7 Methode Des RotationsDocument26 pagesChap7 Methode Des RotationsMamadou BambaPas encore d'évaluation
- Chapitre VIIIDocument8 pagesChapitre VIIISøû Mîã100% (1)
- CHAP3 CM2 SUPTP (Version2)Document50 pagesCHAP3 CM2 SUPTP (Version2)Elhadji Mayacine NguiranePas encore d'évaluation
- Ossatures Souples Næuds Mobiles) : Rotations D'uneDocument20 pagesOssatures Souples Næuds Mobiles) : Rotations D'uneKocouvi Agapi HouanouPas encore d'évaluation
- Corrigé de Lexercice 01 Structures en BA 2020-2021Document13 pagesCorrigé de Lexercice 01 Structures en BA 2020-2021Djoulene HsnPas encore d'évaluation
- Chapitre III-Flexion Simple - BoisDocument29 pagesChapitre III-Flexion Simple - BoisCoumba thiawPas encore d'évaluation
- TD 01 - Mur de SoutènementDocument9 pagesTD 01 - Mur de Soutènementزوزو جيجيPas encore d'évaluation
- Projet de Beton Arme PDFDocument45 pagesProjet de Beton Arme PDFJohn LukePas encore d'évaluation
- Éthodes DES Éléments Finis: Cours-TD-TP M1 VoaDocument21 pagesÉthodes DES Éléments Finis: Cours-TD-TP M1 VoakhenguiPas encore d'évaluation
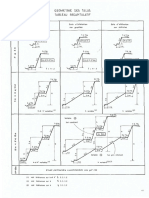
- Geometrie Des Talus - Tableau RecapitulatifDocument1 pageGeometrie Des Talus - Tableau RecapitulatifRIKO100% (1)
- Organigramme FS ELUDocument1 pageOrganigramme FS ELUAminePas encore d'évaluation
- Série N°05 - Fondations Superficielles PDFDocument3 pagesSérie N°05 - Fondations Superficielles PDFel batoul mammouPas encore d'évaluation
- Série 2 Méthodes EnergétiquesDocument7 pagesSérie 2 Méthodes EnergétiquesNaima NaPas encore d'évaluation
- Calcul Des Éléments Tendus (Traction Simple) Serie 3 de CMDocument13 pagesCalcul Des Éléments Tendus (Traction Simple) Serie 3 de CMMi RaPas encore d'évaluation
- Calcul Dyn Part 2Document24 pagesCalcul Dyn Part 2mbarekPas encore d'évaluation
- Organigramme Traction-SimpleDocument2 pagesOrganigramme Traction-SimpleAmira CheboutiPas encore d'évaluation
- TD Tassement Et Consolidation Des SolsDocument2 pagesTD Tassement Et Consolidation Des SolsyhannjeanPas encore d'évaluation
- TD3 Plasticité Des PoutresDocument1 pageTD3 Plasticité Des PoutresmussariPas encore d'évaluation
- Viscosite D'un Liquide PDFDocument10 pagesViscosite D'un Liquide PDFManal IdaliPas encore d'évaluation
- 1 FT1 FlambementDocument9 pages1 FT1 FlambementRussel Kamwa SohPas encore d'évaluation
- 2021 04 26 ExercicesDocument8 pages2021 04 26 ExercicesTOVIHO SessinouPas encore d'évaluation
- Cours de Mécanique Des Sols Tome II Fondations Et Ouvrages en TerreDocument106 pagesCours de Mécanique Des Sols Tome II Fondations Et Ouvrages en TerreADJOUT100% (1)
- Sujet D'examen de Résistance Des Matériaux 2019Document8 pagesSujet D'examen de Résistance Des Matériaux 2019Lala BlanchePas encore d'évaluation
- CHAPITRE 7 BA FlexionDocument36 pagesCHAPITRE 7 BA Flexionelmo5100% (1)
- Cours BA ST2 Chap 1Document15 pagesCours BA ST2 Chap 1philou6259100% (1)
- DL de CM FINALEDocument36 pagesDL de CM FINALEYahya FdPas encore d'évaluation
- Le Potentiel Interne Et Ses ApplicationsDocument32 pagesLe Potentiel Interne Et Ses ApplicationsSatinPas encore d'évaluation
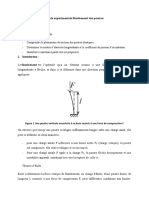
- Mode Opératoire Pour La Réalisation D'essais de Résistance Sur Blocs de Terre CompriméeDocument3 pagesMode Opératoire Pour La Réalisation D'essais de Résistance Sur Blocs de Terre CompriméeZaineb Ben AbdallahPas encore d'évaluation
- MMC-Chapitre 4Document14 pagesMMC-Chapitre 4Mohamed OuaggaPas encore d'évaluation
- Chapitre 4 Dimensionnement Des Sections Soumises Aux Actions CentréesDocument15 pagesChapitre 4 Dimensionnement Des Sections Soumises Aux Actions CentréesRose EvaPas encore d'évaluation
- Flexion Simple Section en Té ELSDocument1 pageFlexion Simple Section en Té ELSoumaima el ftouh slassi100% (1)
- Cours Ouvrages Hydrauliques-6Document10 pagesCours Ouvrages Hydrauliques-6Issam ElmaaniPas encore d'évaluation
- Calcul Poteau BAEL ISTA 2Document1 pageCalcul Poteau BAEL ISTA 2Simo SeprobPas encore d'évaluation
- TD Tassement Et Consolidation Des SolsDocument10 pagesTD Tassement Et Consolidation Des SolsHIMRI DOUNIA MALAKPas encore d'évaluation
- Serie Energie de Def1Document9 pagesSerie Energie de Def1Bouchra AskriPas encore d'évaluation
- BAII Aleg VFDocument17 pagesBAII Aleg VFOussamaPas encore d'évaluation
- Compression Simple PDF FreeDocument7 pagesCompression Simple PDF FreeAymen KhalfaouiPas encore d'évaluation
- OrganigrammeDocument6 pagesOrganigrammemaisaraPas encore d'évaluation
- 2 Esitc La Statique PlaneDocument39 pages2 Esitc La Statique PlaneBilel Ben Brahim100% (1)
- NM 13.1.007 (1998)Document14 pagesNM 13.1.007 (1998)hanif abdelilah100% (1)
- TD N°3 - CorrectionDocument7 pagesTD N°3 - CorrectionAmine SaidiPas encore d'évaluation
- MDS TD2 SolutionsDocument10 pagesMDS TD2 Solutionsaymen nouariPas encore d'évaluation
- Resistance Au Flambement D'un Poteau Bi-Articule Avec Maintiens Lateraux IntermediairesDocument5 pagesResistance Au Flambement D'un Poteau Bi-Articule Avec Maintiens Lateraux IntermediairesmohsenPas encore d'évaluation
- Béton PrécontraintDocument117 pagesBéton PrécontraintwalidPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- SYS-849-8 Mise en Forme Par Deformation Plastique I - Sheet MetalDocument42 pagesSYS-849-8 Mise en Forme Par Deformation Plastique I - Sheet MetalmedPas encore d'évaluation
- TD Systèmes OuvertsDocument6 pagesTD Systèmes OuvertsAs ScofPas encore d'évaluation
- Rapport 2Document75 pagesRapport 2As ScofPas encore d'évaluation
- Rapport de Stage InitiationDocument130 pagesRapport de Stage InitiationAs ScofPas encore d'évaluation
- Questionnaire Destiné Aux DistributeursDocument2 pagesQuestionnaire Destiné Aux DistributeursAs ScofPas encore d'évaluation
- CHAPITRE I Business Model CanvasDocument4 pagesCHAPITRE I Business Model CanvasAs ScofPas encore d'évaluation
- Modèle Du Plan D'affaires 2013Document37 pagesModèle Du Plan D'affaires 2013As ScofPas encore d'évaluation
- Rapport de Stage L3Document68 pagesRapport de Stage L3As ScofPas encore d'évaluation
- TorsionDocument5 pagesTorsionM'ed El'BkPas encore d'évaluation
- Semelle Isolée CentreDocument8 pagesSemelle Isolée Centretarek cherchaliPas encore d'évaluation
- Note de Calcul Totale OptimaleDocument12 pagesNote de Calcul Totale OptimaleKevin EboumbouPas encore d'évaluation
- Présentation1 BPDocument8 pagesPrésentation1 BPAyman Mejdoub100% (1)
- Descente de Charge Sur PieuxDocument6 pagesDescente de Charge Sur PieuxYuùri GimmsPas encore d'évaluation
- Exercices RDMDocument153 pagesExercices RDMTâm ĐàoPas encore d'évaluation
- Calcul Des ContreventementsDocument33 pagesCalcul Des ContreventementsNdeye Marieme DiagnePas encore d'évaluation
- BETON PRECONTRAINT Exercices de Beton PrecontraintDocument11 pagesBETON PRECONTRAINT Exercices de Beton PrecontraintOumaïma El Abidi0% (1)
- Béton Armé I (3lgc & 3ltp) p1Document72 pagesBéton Armé I (3lgc & 3ltp) p1ZohirMadridPas encore d'évaluation
- 152 DT Fleche Recomprof 0Document2 pages152 DT Fleche Recomprof 0Fatma BelaPas encore d'évaluation
- U11 CorrigéDocument11 pagesU11 Corrigéspectrum66Pas encore d'évaluation
- BTP008 Examen 2021 Session 1 CorrectionDocument22 pagesBTP008 Examen 2021 Session 1 CorrectionMarion GaudéPas encore d'évaluation
- CHAPITRE 10.1ferraillage Poutre200013Document25 pagesCHAPITRE 10.1ferraillage Poutre200013Sara TachPas encore d'évaluation
- Tccs 01 2010 TiscoDocument12 pagesTccs 01 2010 TiscoVinh HiPas encore d'évaluation
- Chapitre VIIIDocument8 pagesChapitre VIIISøû Mîã100% (1)
- Serie2 RDM2 2019 2020 PDFDocument2 pagesSerie2 RDM2 2019 2020 PDFyahyaPas encore d'évaluation
- Belbachir Benmokhtari PDFDocument77 pagesBelbachir Benmokhtari PDFMoussaabBoboPas encore d'évaluation
- TD 1 Essais de TractionDocument3 pagesTD 1 Essais de TractionMoussa DioubatePas encore d'évaluation
- 5 FlambageDocument4 pages5 FlambageAymen NasrPas encore d'évaluation
- Chapitre III Calcul A La Rupture Et Anal PDFDocument114 pagesChapitre III Calcul A La Rupture Et Anal PDFGhitadam BougPas encore d'évaluation
- 341504868-38475200 - OF PP T-BA EL-doc - WatermarkDocument72 pages341504868-38475200 - OF PP T-BA EL-doc - WatermarkSoro CoulibalyPas encore d'évaluation
- NOTE-DE-CALCUL StadeDocument156 pagesNOTE-DE-CALCUL StadeOussama AMARI50% (2)
- 03-Analyse GlobaleDocument56 pages03-Analyse GlobaleOussamaAmraniPas encore d'évaluation
- 06 MECA0444-ArbresIDocument49 pages06 MECA0444-ArbresIElmehdi ElmessaoudiPas encore d'évaluation
- Les Organigrammes de Calcul Des ArmaturesDocument7 pagesLes Organigrammes de Calcul Des ArmaturesMohamed LarPas encore d'évaluation
- Proposition Du Corrige Type 2em Evaluation BP Groupe 8Document21 pagesProposition Du Corrige Type 2em Evaluation BP Groupe 8Ibrahim Amadou Youssoufa100% (1)
- Etude Et Essai PoutreDocument8 pagesEtude Et Essai PoutreJean François LatchoumaninchettyPas encore d'évaluation
- Bar 6689Document110 pagesBar 6689abdelhak rcaPas encore d'évaluation
- Memoire Dimensionnement Charpente MetalliqueDocument186 pagesMemoire Dimensionnement Charpente Metalliquelebobo1867% (3)