Vous aimerez peut-être aussi
- Bien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLD'EverandBien débuter avec SQL: Exercices dans l'interface PhpMyAdmin et MySQLPas encore d'évaluation
- Boite À Outils Transfert de ConnaissancesDocument104 pagesBoite À Outils Transfert de ConnaissancesElyes Benhmida100% (2)
- Cours Microcontrôleurs-Tres ImportantDocument132 pagesCours Microcontrôleurs-Tres ImportantNabil Dakhli0% (1)
- Introduction Aux Systèmes D'exploitationDocument44 pagesIntroduction Aux Systèmes D'exploitationHammad LazrekPas encore d'évaluation
- Piscicole - Analyse de La Chaine de Valeur de La Pisciculture Cote IvoireDocument12 pagesPiscicole - Analyse de La Chaine de Valeur de La Pisciculture Cote IvoireBienvenu Kakpo100% (1)
- Informatique de BaseDocument52 pagesInformatique de BaseHiba HBPas encore d'évaluation
- MFG FR Outils Gestion Ressources Humaines 07 2007 PDFDocument190 pagesMFG FR Outils Gestion Ressources Humaines 07 2007 PDFstyve vorrenPas encore d'évaluation
- Chapitre4 PDFDocument44 pagesChapitre4 PDFAmina NouriPas encore d'évaluation
- Architecture Et Technologies Des Systemes InformatiquesDocument74 pagesArchitecture Et Technologies Des Systemes InformatiquesHamzaoui AnasPas encore d'évaluation
- Extrait de Role BelabdiDocument1 pageExtrait de Role BelabdiAlexanor Asma0% (3)
- AAP Chapitre 1Document30 pagesAAP Chapitre 1Gharsellaoui MuhamedPas encore d'évaluation
- Module Calcul Parallèle: Cours DESADocument66 pagesModule Calcul Parallèle: Cours DESAElisée NdjabuPas encore d'évaluation
- Informatique ParallèleDocument18 pagesInformatique ParallèleNoblaPas encore d'évaluation
- Leçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleDocument120 pagesLeçon N°1: Presentation de L'Informatique Industrielle Et Des Systemes Micro-Programmes I - L'Informatique IndustrielleFulbert FissouPas encore d'évaluation
- TP Systeme DistribuéDocument2 pagesTP Systeme DistribuéPablo SenePas encore d'évaluation
- Info TristanDocument14 pagesInfo TristanEulerPas encore d'évaluation
- INTRODUCTION AUX SYSTÈMES D EXPLOITATION. Pr. Hajar IGUERDocument72 pagesINTRODUCTION AUX SYSTÈMES D EXPLOITATION. Pr. Hajar IGUERjawad iounoussePas encore d'évaluation
- Parallele 2022 IITDocument27 pagesParallele 2022 IITslim yaichPas encore d'évaluation
- Informatique IndustrielleDocument16 pagesInformatique IndustrielleNo RayaPas encore d'évaluation
- Architecture Et Segmentation Mémoire Du 80286Document39 pagesArchitecture Et Segmentation Mémoire Du 80286the dawgPas encore d'évaluation
- Chap 1Document10 pagesChap 1Ghilass SahkiPas encore d'évaluation
- Chap 1Document10 pagesChap 1Adel BerkaniPas encore d'évaluation
- Informatique-Introduction Unite CentraleDocument21 pagesInformatique-Introduction Unite CentraleAhmed SmailPas encore d'évaluation
- Cours 1Document25 pagesCours 1Abdoulaye ChékaraouPas encore d'évaluation
- Architectures ParallelesDocument15 pagesArchitectures ParallelesYasmine ChihabPas encore d'évaluation
- SIA Chap 1Document28 pagesSIA Chap 1Cherine TeminePas encore d'évaluation
- Cours Parallélisme Et Clustering (Part1)Document26 pagesCours Parallélisme Et Clustering (Part1)Mohamed BthabetPas encore d'évaluation
- Introduction Au Systeme D'exploitation 2Document46 pagesIntroduction Au Systeme D'exploitation 2draou maissaPas encore d'évaluation
- Chapitr 001Document5 pagesChapitr 001oussama bouguerraPas encore d'évaluation
- Architecture ParalleleDocument21 pagesArchitecture ParalleleAmine Gigi100% (1)
- Ch1 ArchitectureDesOrdinateursDocument29 pagesCh1 ArchitectureDesOrdinateursYouness BelkhiriPas encore d'évaluation
- Chap1 DLXDocument10 pagesChap1 DLXmed100% (1)
- SAM - Chapitre 2Document7 pagesSAM - Chapitre 2الشاب المسلمPas encore d'évaluation
- Annales NFP111Document70 pagesAnnales NFP111Bertin ModossioPas encore d'évaluation
- Cours Microcontrôleur Microprocesseur 47Document31 pagesCours Microcontrôleur Microprocesseur 47LAHOUSSINE ELMAHNIPas encore d'évaluation
- Micro 02Document19 pagesMicro 02EL Alaoui YoussefPas encore d'évaluation
- Cours OS - CH1Document73 pagesCours OS - CH1Oumaima ZiatPas encore d'évaluation
- O2I DocumentDocument20 pagesO2I DocumentDi-Enilson ÉtiennePas encore d'évaluation
- Histo GenDocument18 pagesHisto GenOmar DiakhatePas encore d'évaluation
- Nouveau Présentation Microsoft PowerPointDocument22 pagesNouveau Présentation Microsoft PowerPointmaiz100% (1)
- Lec 02Document34 pagesLec 02जागो हिन्दुस्तानियोंPas encore d'évaluation
- Cours No 01 Approche Des Systèmes A Microprocesseurs.Document4 pagesCours No 01 Approche Des Systèmes A Microprocesseurs.MAROUA TWALBIAPas encore d'évaluation
- Cours Sys 2PPT20Document155 pagesCours Sys 2PPT20kaderPas encore d'évaluation
- Chapitres 1 & 2Document17 pagesChapitres 1 & 2Aşhraf El JırariPas encore d'évaluation
- 3 - BureautiqueDocument49 pages3 - Bureautiqueiméne belkadiPas encore d'évaluation
- CH2 - Architecture Des OrdinateursDocument5 pagesCH2 - Architecture Des OrdinateursJean LucPas encore d'évaluation
- Chapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Document29 pagesChapitre 2 Systemes A Base de Microprocesseurs - C2I2S - S1Karym ElhoussinePas encore d'évaluation
- Chap 2Document30 pagesChap 2Toon ManPas encore d'évaluation
- Réalisé Par: M. MERCHICHI Mohammed: E-MailDocument29 pagesRéalisé Par: M. MERCHICHI Mohammed: E-Mailmohammed merchichiPas encore d'évaluation
- Cours 1 CDA MicroprocesseursDocument18 pagesCours 1 CDA MicroprocesseursYoussef YoussefPas encore d'évaluation
- MICRODocument4 pagesMICROWalter FopaPas encore d'évaluation
- Introduction SupportDocument34 pagesIntroduction SupportRishala MOURAMOIPas encore d'évaluation
- Cours - Architecture ch1Document45 pagesCours - Architecture ch1Hoody 05Pas encore d'évaluation
- WWW - Cours Gratuit - Com Id 5297Document90 pagesWWW - Cours Gratuit - Com Id 5297Madjilem NayamPas encore d'évaluation
- Informatique Industrielle 1Document12 pagesInformatique Industrielle 1alainPas encore d'évaluation
- Université Du Lac Tanganyika: Cours de L'Initiation A L'InformatiqueDocument161 pagesUniversité Du Lac Tanganyika: Cours de L'Initiation A L'InformatiqueCuba Arm ArmelPas encore d'évaluation
- 0 HistoryDocument31 pages0 HistoryYàs SérPas encore d'évaluation
- Cours Arch v2Document84 pagesCours Arch v2koussayounePas encore d'évaluation
- 01 Les Processeurs 64 Bits Et Multicoeurs BRUYERE DRACHEDocument8 pages01 Les Processeurs 64 Bits Et Multicoeurs BRUYERE DRACHESandra BouPas encore d'évaluation
- TD1 INF131 Systemes D'exploitationDocument2 pagesTD1 INF131 Systemes D'exploitationyvan tedongmoPas encore d'évaluation
- Systeme Dexploitation Notes de Cours 1Document18 pagesSysteme Dexploitation Notes de Cours 1omar amarPas encore d'évaluation
- Cours ParallelismeDocument63 pagesCours ParallelismeChafik BerdjouhPas encore d'évaluation
- Linux - 1Document70 pagesLinux - 1fatimaezzahra elhoubriPas encore d'évaluation
- Résume RDMDocument5 pagesRésume RDMMoustapha Abdillahi abdiPas encore d'évaluation
- Examen Optimisation Et ModélisationDocument1 pageExamen Optimisation Et ModélisationmalikaPas encore d'évaluation
- ACL Bon CoursDocument16 pagesACL Bon CoursElvÏs ElvÏsPas encore d'évaluation
- Pfe D LmerdDocument8 pagesPfe D LmerdHafsa El basriPas encore d'évaluation
- Cour Ja Va DétailléDocument561 pagesCour Ja Va DétailléMajed Ben SaadaPas encore d'évaluation
- Intervention - Cas Marketing Nanterre 102013henkel DR Caspari PDFDocument80 pagesIntervention - Cas Marketing Nanterre 102013henkel DR Caspari PDFiyad_techPas encore d'évaluation
- Serie QT Designer 2022-2023Document9 pagesSerie QT Designer 2022-2023Nesrine GharianiPas encore d'évaluation
- Copie de SoutenirDocument42 pagesCopie de SoutenirrniaryjaminaPas encore d'évaluation
- Tuyauterie Liste de Prix FR 2021Document38 pagesTuyauterie Liste de Prix FR 2021Hassim CongoPas encore d'évaluation
- Suivi BudgetaireDocument12 pagesSuivi BudgetairecabeaureyPas encore d'évaluation
- Caractx DIESELDocument45 pagesCaractx DIESELAtone RomeoPas encore d'évaluation
- الالتزام التنظيمي في المؤسسة الجزائريةDocument13 pagesالالتزام التنظيمي في المؤسسة الجزائريةaicha aichaPas encore d'évaluation
- Diag Calculateur Edc16c3et16c34Document23 pagesDiag Calculateur Edc16c3et16c34luckyPas encore d'évaluation
- Atelier Adhérent CFDT: Les Unités Aéroportuaires en 12 HeuresDocument2 pagesAtelier Adhérent CFDT: Les Unités Aéroportuaires en 12 HeuresGérard MenvussaPas encore d'évaluation
- Les Mensonges de La Propagande Néo Féministe by El Rayhan Z LibDocument31 pagesLes Mensonges de La Propagande Néo Féministe by El Rayhan Z LibGloria ChristiPas encore d'évaluation
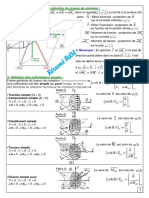
- Exos2 TorsionDocument2 pagesExos2 TorsionmohammedPas encore d'évaluation
- Catalogue DAI Pro 2018Document36 pagesCatalogue DAI Pro 2018Ricardo FelixPas encore d'évaluation
- Fiche de Culture de La Pomme de TerreDocument10 pagesFiche de Culture de La Pomme de TerreFrançoisLassus-PigatPas encore d'évaluation
- Lavande Bâtiments Réseaux Sociaux RapportDocument9 pagesLavande Bâtiments Réseaux Sociaux RapportSara ZahafPas encore d'évaluation
- Cofrend Fiche MagnetoscopiewebDocument2 pagesCofrend Fiche MagnetoscopiewebAbdelkaderPas encore d'évaluation
- TDElec 8Document7 pagesTDElec 8oukkaPas encore d'évaluation
- DistributeursDocument7 pagesDistributeursdayangPas encore d'évaluation
- Unity 5 FreDocument80 pagesUnity 5 Frestephane AbrePas encore d'évaluation
- Econometrie Pour La FinanceDocument80 pagesEconometrie Pour La FinanceSiehi Toh ServaisPas encore d'évaluation